
- 1 Giới thiệu
- 2 Nhà phát triển về máy
- 3 Tính năng
- 4 Gói nội dung
- 5 Đặc điểm kỹ thuật
- 5.1 Drone
- 5.2 Giao tiếp
- 5.3 Hệ thống định vị
- 5.4 Skycontroller 4
- 5.5 Pin máy bay thông minh
- 5.6 Ứng dụng
- 5.7 Máy ảnh
- 5.8 Chế độ bay tự động
- 5.9 An ninh mạng
- 5.10 Parrot SDK
- 6 Hình thức
- 7 Giao tiếp
- 7,1 4G
- 7,2 Tối đa. phạm vi với kết nối 4G
- 7,3 Wi-Fi
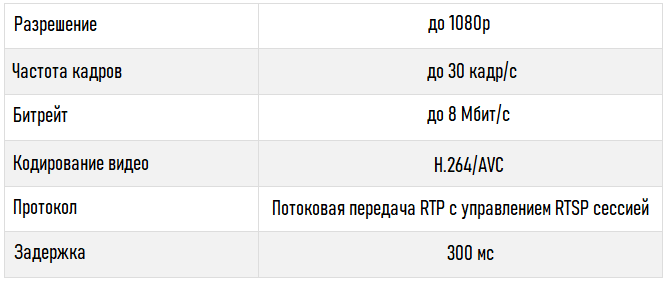
- 7,4 Video trực tiếp
- 8 Máy ảnh
- 8.1 Ma trận 48MP
- 8.2 Ống kính
- 8.3 Chế độ video
- 8,4 Mã hóa video
- 8,5 HDR
- 8,6 Chế độ ảnh
- 9 Ổn định lai
- 9.1 Gimbal camera chính
- 10 Đo ảnh
- 10.1 Kiểm tra và lập bản đồ
- 10,2 Khả năng AI và 4G
- 10,3 Chuyến bay tự động
- 11 Phép đo quang hoặc máy bay
- 11,1 Ưu điểm về phép đo quang
- 11,2 Nhược điểm của LIDAR
- 12 SDK
- 12.1 SDK không khí
- 12,2 SDK mặt đất
- 12,3 OpenFlight
- 12,4 Sphinx
- 12,5 Olympe
- 12,6 PdrAW
- 12,7 Mô hình C. A. D.
- 12,8 MAVLink và khả năng tương thích GUTMA
- 13 Hệ sinh thái đối tác lớn nhất dành cho máy bay không người lái Parrot
- 13,1 Parrot cho mọi nhu cầu kinh doanh
- 14 Bảo mật mạng
- 14,1 Bảo mật dữ liệu
- 14,2 Tuân thủ FIPS140 -2 và được chứng nhận bởi Yếu tố bảo mật CC EAL5
- 14.3 Kết nối an toàn 4G và xác thực mạnh
- 14.4 Khởi tạo và nâng cấp an toàn
- 14,5 Đặt khóa người dùng trên phần tử bảo mật
- 14,6 Ảnh được ký kỹ thuật số
- 14,7 Tính minh bạch và bảo mật liên tục với tiền thưởng lỗi
- 15 Quản lý dữ liệu
- 15.1 Dữ liệu đã thu thập
- 15.2 Sử dụng cuối cùng của Dữ liệu đã thu thập [1 26]
- 15.3 Cải thiện trí tuệ nhân tạo (AI)
- 16 Đặc điểm chuyến bay
- 16.1 Đặc điểm khí động học
- 16,2 Bộ truyền động và khí động học
- 16,3 Bộ cảm biến
- 16,4 Đặc tính của bộ cảm biến
- 16,5 Lái tự động
- 17 Bay tự động
- 17,1 Các tính năng chính
- 17.2 Chiến lược hệ thống cảm nhận
- 17.3 Cảm biến
- 17.4 Đình chỉ kép
- 17.5 Tái tạo môi trường
- 18 Nhiệm vụ chuyến bay
- 18,1 Tính năng chính
- 19 Giá và tính khả dụng
- 20 Tải xuống tài liệu
- 21 Video
Giới thiệu [16 4]
Parrot Anafi Ai là một giải pháp độc đáo hoàn toàn mới của một nhà phát triển nổi tiếng người Phápsử dụng thương mại
Thẻ gọi của Anafi Ai là mô-đun 4G tích hợp, nhờ đó máy bay không người lái có thể sử dụng thế hệ thứ tư của thông tin di động làm kênh truyền dữ liệu chính giữa máy bay không người lái và thiết bị điều khiển, trên thực tế loại bỏ tất cả các hạn chế về phạm vi bay và xác định trước hoạt động của UAV bên ngoài tầm nhìn. Nhìn về phía trước, chúng tôi lưu ý rằng tiềm năng được tuyên bố của cỗ máy hóa ra lại cực kỳ mạnh mẽ và hơn bao giờ hết tương ứng với vẻ ngoài tương lai của nó, vốn được lấy cảm hứng từ thiên nhiên để tạo ra các kỹ sư người Pháp.
Nhà phát triển về chiếc xe
Martin Liné, giám đốc tiếp thị tại Parrot, máy bay không người lái Parrot

Các tính năng
Các tính năng chính của Parrot Anafi Ai:
- Trọng lượng 898 gram
- Thời gian bay 60 giây
- Thiết kế di động có thể gập lại độc đáo
- Mô-đun giao tiếp 4G tích hợp để tương tác với thiết bị điều khiển / máy bay không người lái đầy đủ mà không bị hạn chế trong mọi điều kiện môi trường
- Tương thích với LTE trên toàn thế giới
- Được trang bị hệ thống truyền tín hiệu đa hướng (4 ăng-ten định hướng có phản xạ (với độ lợi: ăng-ten 2,5 dBi / s). Máy bay không người lái xác định cặp ăng-ten tốt nhất tùy thuộc vào hướng và vị trí của nó so với vị trí của phi công)
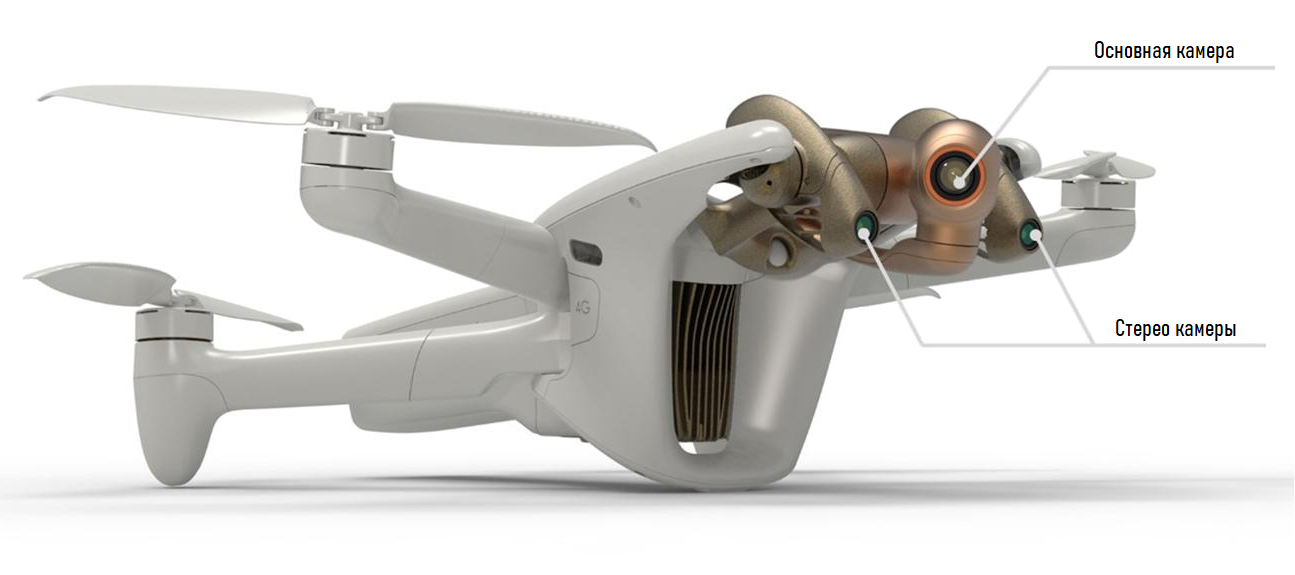
- Được trang bị hệ thống hình ảnh đa hướng độc đáo của thế giới xung quanh được xây dựng trên một cặp máy ảnh lập thể gắn trên gimbal chuyên dụng với phạm vi lia 330 độ (từ -120 ° đến 210 °), làm việc song song với một hệ thống tối ưu hóa thông minh. đường bay
- Thích ứng cho chuyến bay trong nhà
- Phát video trực tiếp ở 1080p với độ trễ thấp (300 m / s) mà không có giới hạn phạm vi ở bất kỳ đâu trên thế giới, với tốc độ bit video 12 Mbps
- Khả năng truyền tệp lên bộ nhớ đám mây trực tiếp trong chuyến bay
- Mô-đun giao tiếp Wi-Fi tích hợp (Wi-Fi 802.11a / b / g / n) để điều khiển tương tác thiết bị / máy bay không người lái chính thức (như một tùy chọn kết nối thay thế)
- Nô lệ. Dải tần số Wi-Fi: 2,4 GHz / 5,8 GHz
- Tối đa. phạm vi bay FPV qua Wi-Fi: 9 km
- Chế độ hoạt động tự động độc đáo của mô-đun 4G / Wi-Fi, cho phép, dựa trên tắc nghẽn mạng, chuyển đổi liền mạch từ công nghệ truyền thông này sang công nghệ truyền thông khác mà không bị mất dữ liệu
- Máy bay không người lái cấp bảo vệ IPX3
- Tối đa. thời gian bay 32 phút
- Tối đa. tốc độ bay ngang 61 km / h
- Tối đa. Sức cản gió: 13 m / s
- Tối đa.trần trên mực nước biển 5000 m
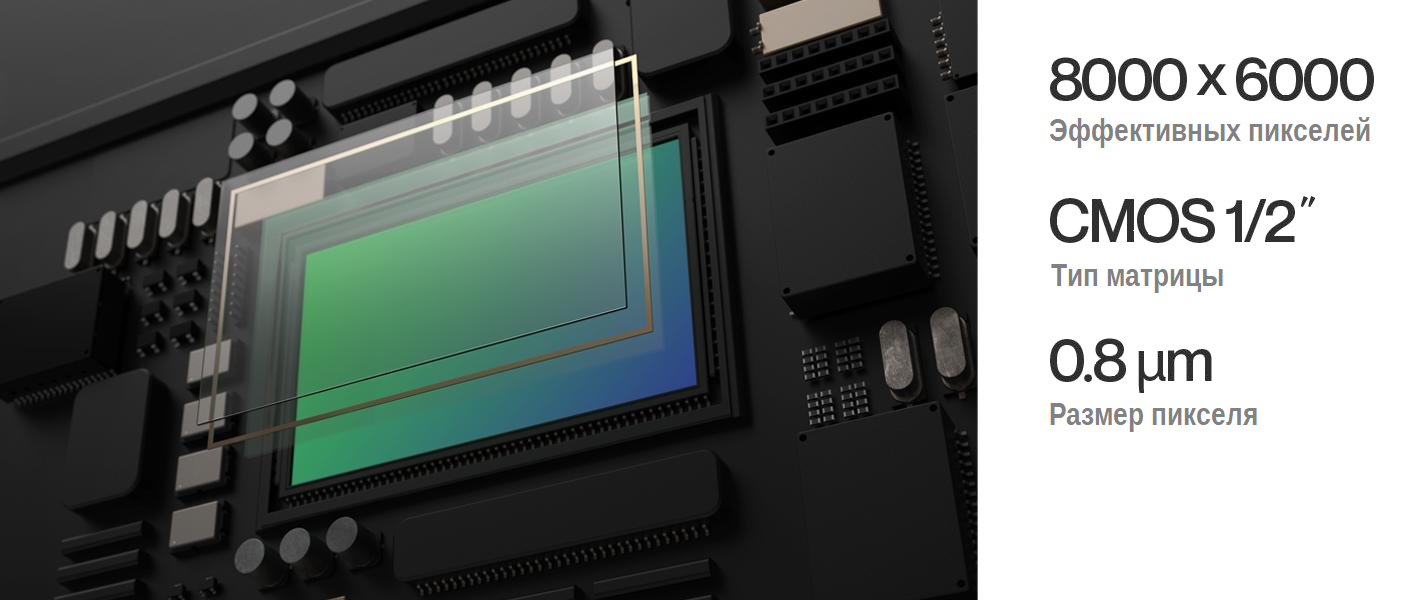
- Máy ảnh 48MP 4K được xây dựng trên ma trận CMOS 1/2 inch với kích thước điểm ảnh 0,8 μm; với mảng bộ lọc màu Bayer tích hợp
- Thấu kính LD-ASPH quang học
- Hệ thống ổn định hình ảnh 6 trục kết hợp (EIS kỹ thuật số 3 trục cơ học 3 trục)
- Có thể điều khiển phạm vi hoạt động Gimbal -90 ° đến 90 °
- Thu phóng kỹ thuật số không mất dữ liệu 6x (2x 4K / 4x FHD)
- Max. tốc độ bit video 200 Mbps
- Định dạng quay video HDR8 / HDR10
- Tối đa. dải động 14EV
- Cấu hình màu P-log để xử lý hậu kỳ
- Chế độ bay và chụp tự động 5 × (Đo ảnh / Kế hoạch chuyến bay / Người quay phim / RTH thông minh / Xe)
- Các khe cắm tích hợp cho thẻ MicroSD và thẻ SIM
- Tương thích với PIX4D Suite
- Chế độ bay đo quang có sẵn trong mob. Ứng dụng Flight 7 miễn phí và phần mềm OpenFlight
- Tạo kế hoạch bay bằng một cú nhấp chuột
- Phép đo quang 48MP 1 fps: nhanh gấp đôi so với các đối thủ cạnh tranh
- Độ chính xác khi chụp: 0,46 cm / pix. GSD ở 30m
- Hỗ trợ Parrot SDK (với khả năng nhúng mã của bạn vào máy bay không người lái bằng Air SDK, tạo ứng dụng di động bằng SDK mặt đất, định cấu hình trạm mặt đất nguồn mở bằng OpenFlight, tương tác với tượng Nhân sư hiện đại công cụ mô phỏng máy bay không người lái cũng như lập trình kịch bản Python với Olympe và xử lý video và siêu dữ liệu với PdrAW)
- Tương thích với phần mềm của bên thứ 3: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai tuân thủ quy định Chung Quy định Quy định về bảo vệ dữ liệu của Liên minh Châu Âu (GDPR)
- Bảo mật dữ liệu vượt trội với Phần tử bảo mật WISeKey cấp 3 được nhúng NIST FIPS140-2 với Tiêu chí chung EAL5 chứng nhận
- Video và các điều khiển được bảo vệ bằng SRTP / DTLS theo lên webRTC
- Thiết bị điều khiển cầm tay Parrot Skyco mới ntroller 4
- Ứng dụng di động mới Parrot FreeFlight 7

Gói
Nhà phát triển cung cấp máy bay không người lái trong một cấu hình duy nhất, sẽ bao gồm:
- Drone ANAFI Ai
- Hộp vận chuyển cứng
- Thiết bị điều khiển Parrot Skycontroller 4
- 1 × Thông minh pin
- Bộ sạc USB-PD
- Bộ cánh quạt dự phòng (2CW / 2CCW)
- Cáp đồng hành (USB-C to Lightning)
- Cáp đồng hành 2 × (USB -C đến USB-C)
- Biểu đồ hiệu chuẩn

Đặc điểm kỹ thuật
Máy bay

Giao tiếp
Hệ thống điều hướng
Skycontroller 4

Pin máy bay thông minh
Ứng dụng

Máy ảnh

Chế độ bay tự động
An ninh mạng
Parrot SDK
Tiếp theo, bạn có thể tự làm quen với thông tin chính của Parrot Anafi Ai, điều này sẽ cho phép bạn tìm hiểu chi tiết hơn về tiềm năng được công bố của máy, cũng như những cải tiến nào đã được thực hiện so với phiên bản thương mại của máy bay không người lái Parrot Anfi Thermal và các máy bay không người lái khác từ các thương hiệu hàng đầu.
Hình thức





Giao tiếp
4G
ANAFI Ai bao gồm mô-đun vô tuyến 4G (ngoài mô-đun radio Wi-Fi), cho phép bạn phát một luồng video ở chất lượng 1080p với tốc độ bit tối đa là 12 Mbps, với độ trễ rất thấp (300 ms), không giới hạn về phạm vi và ở bất kỳ đâu trên thế giới.
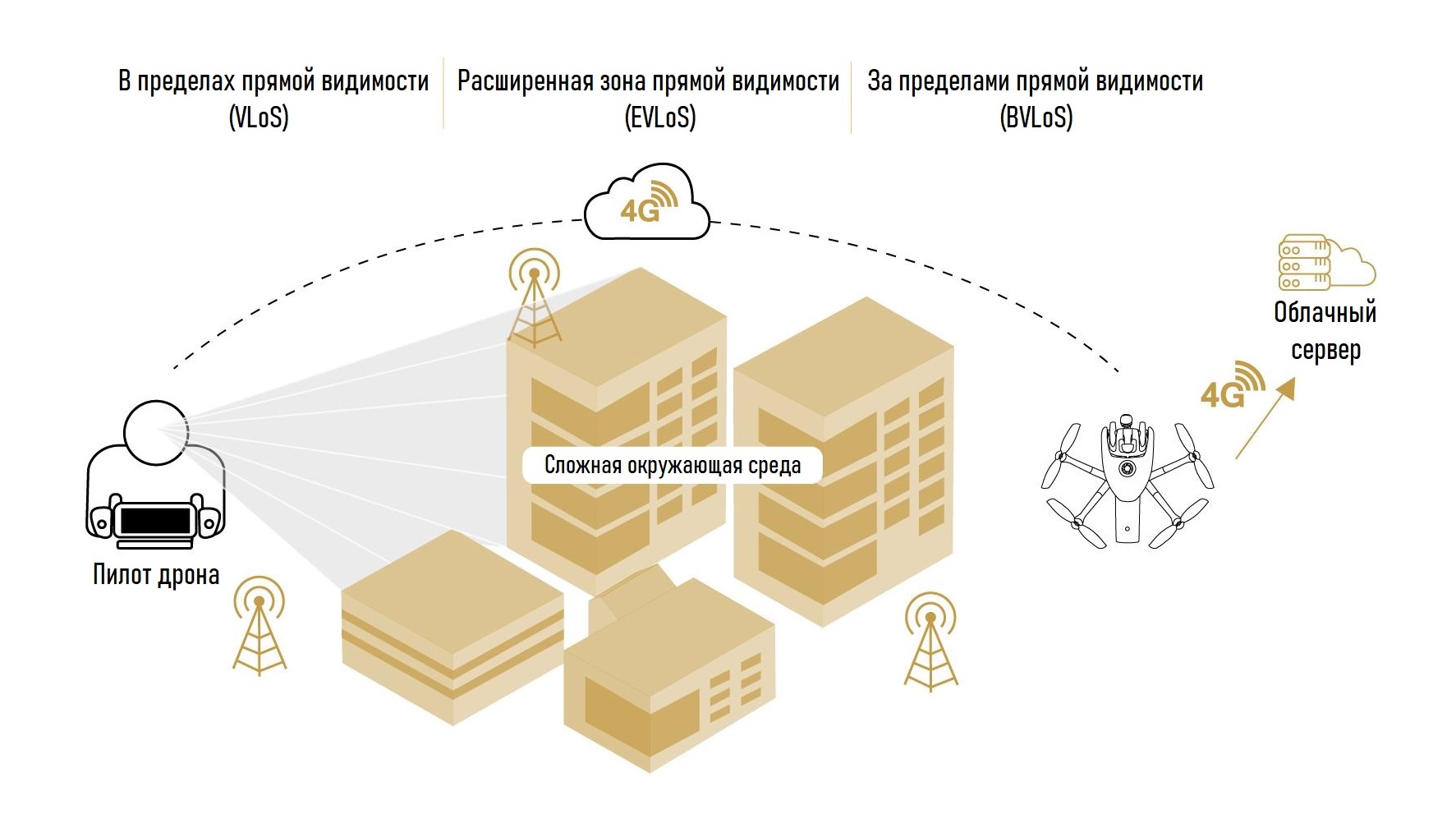
Khả năng tương thích
Mô-đun ANAFI Ai 4G hỗ trợ hơn 28 băng tần, bao phủ hơn 98% tần số được triển khai trên toàn thế giới.
Công tắc mạng tự động
Chất lượng và băng thông của mạng 4G và Wi-Fi được đo sau mỗi 100ms để thích ứng với điều kiện mạng. Kết hợp với các thuật toán định tuyến, kết nối giữa máy bay không người lái và bộ điều khiển của nó được duy trì ngay cả khi Wi-Fi bị gián đoạn nghiêm trọng. Như vậy, khi băng thông hiệu dụng (băng thông khả dụng) của Wi-Fi dưới 1,5 Mbps, hệ thống sẽ tự động chuyển sang 4G.
Để hạn chế việc tiêu thụ dữ liệu di động khi phi công ở trong phạm vi phủ sóng của mạng Wi-Fi của máy bay không người lái, quá trình chuyển đổi từ 4G sang Wi-Fi cũng được thực hiện tự động mà không cần cắt luồng video.
Tối đa phạm vi có kết nối 4G
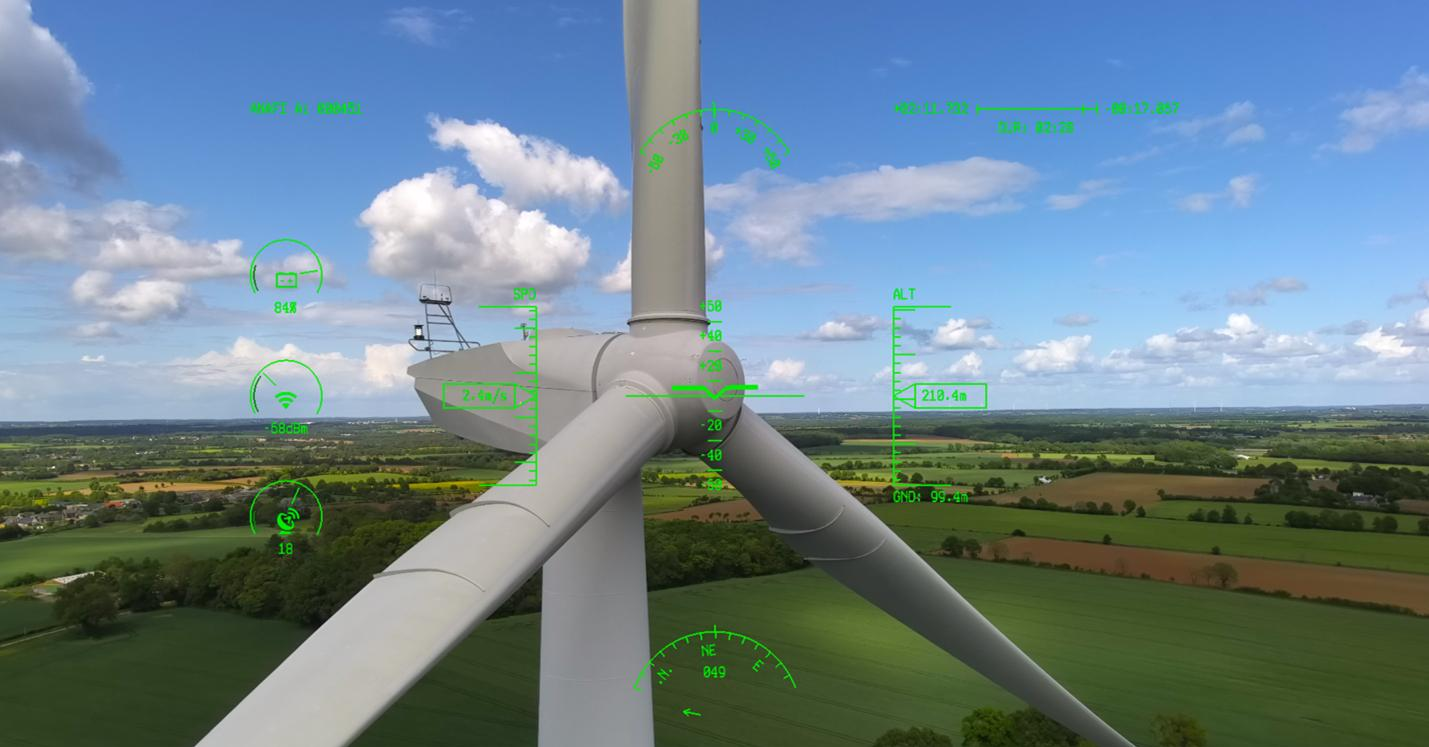
Video từ nhà phát triển cho thấy giá trị tối đa. phạm vi bay của Anafi Ai với kết nối 4G theo một hướng trong một lần sạc pin. Tổng thời gian bay là 29 phút với tốc độ bay ngang trung bình là 58 km / h (16 m / s). Trong thời gian này, máy bay không người lái đã có thể bay được 27 km. Bạn cũng có thể nhận thấy rằng chuyến bay được thực hiện trong điều kiện gió mạnh, liên tục được cảnh báo bởi hệ thống máy bay không người lái.
Các thuật toán tối ưu hóa luồng video được triển khai
Kiểm soát tắc nghẽn 4G
Thuật toán kiểm soát tắc nghẽn cho phép:
- Đo lường mất gói trong toàn bộ chu kỳ mạng.
- Đo độ trễ (thời gian khứ hồi).
- Điều chỉnh băng thông theo hai tham số này.
Mục tiêu cuối cùng của thuật toán là tối đa hóa băng thông khả dụng trong khi vẫn duy trì độ trễ thấp nhất có thể. Thuật toán này được thực hiện trên mỗi giao diện có sẵn trong máy bay không người lái, mỗi giao diện có các thông số riêng, được tối ưu hóa theo mạng. Dựa trên thông tin được cung cấp bởi thuật toán này, trình quản lý liên kết đưa ra các quyết định về định tuyến và giao diện hoạt động.
Điều khiển máy bay không người lái qua kết nối 4G
ANAFI Ai kết nối với bộ điều khiển từ xa qua 4G trong vòng chưa đầy 30 giây nếu máy bay không người lái nằm ngoài phạm vi Wi-Fi và trong vòng chưa đầy 15 giây nếu máy bay không người lái nằm trong phạm vi Wi-Fi. Và kết nối 4G cũng cung cấp:
- Phát hiện và bắt đầu kết nối dựa trên giao thức VOIP SIP.
- Sử dụng máy chủ chuyển tiếp để thiết lập kết nối qua mạng an toàn.
Hiệu suất luồng video
- Độ trễ: 300 ms.
- Bảo mật: video và điều khiển được bảo vệ bằng SRTP / DTLS theo webRTC.
- Anten: 28 băng tần LTE từ 700 MHz đến 2,6 GHz.

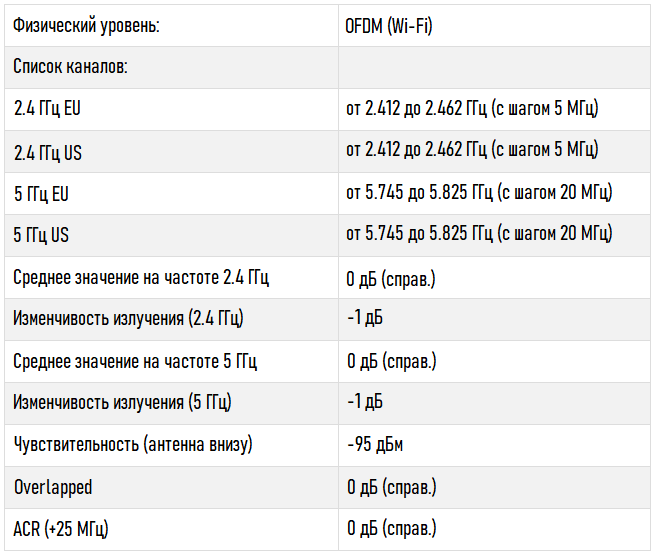
Wi-Fi
Hệ thống truyền đa hướng
- ANAFI Ai có 4 anten phản xạ định hướng (với độ lợi anten: 2,5 dBi / s). Máy bay không người lái xác định cặp ăng-ten tốt nhất dựa trên định hướng và vị trí của nó so với vị trí của phi công.
- Với mức tăng kết hợp lại 3,5 / - 1,5 dBi trong mặt phẳng ngang của máy bay không người lái, mức tăng ANAFI Ai RF rất đồng nhất.
- Bức xạ ăng ten hạ lưu đã được cải thiện 4 dB so với ANAFI.
Thiết kế bên ngoài của radio công suất lớn
Mặt trước của radio tối đa hóa công suất ở chân ăng ten với độ tuyến tính rất tốt và độ nhạy (-94 dBm ở 6,5 Mbps) để đạt được công suất giới hạn FCC tối đa.

Độ tin cậy của Wi-Fi
Thông số 802.11
băng thông thấp, độ trễ thấp, sự thay đổi của mức thu do tốc độ của máy bay không người lái, tầm xa, sự hiện diện của nhiễu. Các thông số này bao gồm tổng hợp, số lần thử lại, công nghệ MiMo (STBC), tốc độ dữ liệu khung hình kiểm soát và điều kiện ngắt kết nối.
Ngăn chặn nhiễu thông minh
ANAFI Ai có thuật toán xóa kênh (băng tần kép 2,4 GHz và 5 GHz) trong trường hợp bị nhiễu.
Thích ứng và giám sát dòng chảy
ANAFI Ai liên tục theo dõi trạng thái của liên kết 4 Hz và có thể phát hiện nhiễu. Điều này cho phép bạn tối ưu hóa động băng thông và kích thước của các gói được truyền. Nó cũng cảnh báo cho phi công nếu anh ta đang ở trong một môi trường gây nhiễu đặc biệt hoặc sắp mất tín hiệu.
Giảm băng thông
Ở giới hạn của phạm vi và nếu có điều kiện, ANAFI Ai có thể chuyển sang băng thông 10 MHz để cải thiện độ nhạy 3 dB và tăng phạm vi lên 40%.

Chỉ báo radio
Phát video
Chỉ báo liên kết video
Đã triển khai các thuật toán tối ưu hóa luồng video
Truyền trực tuyến Parrot Gen4 (thế hệ thứ 4)
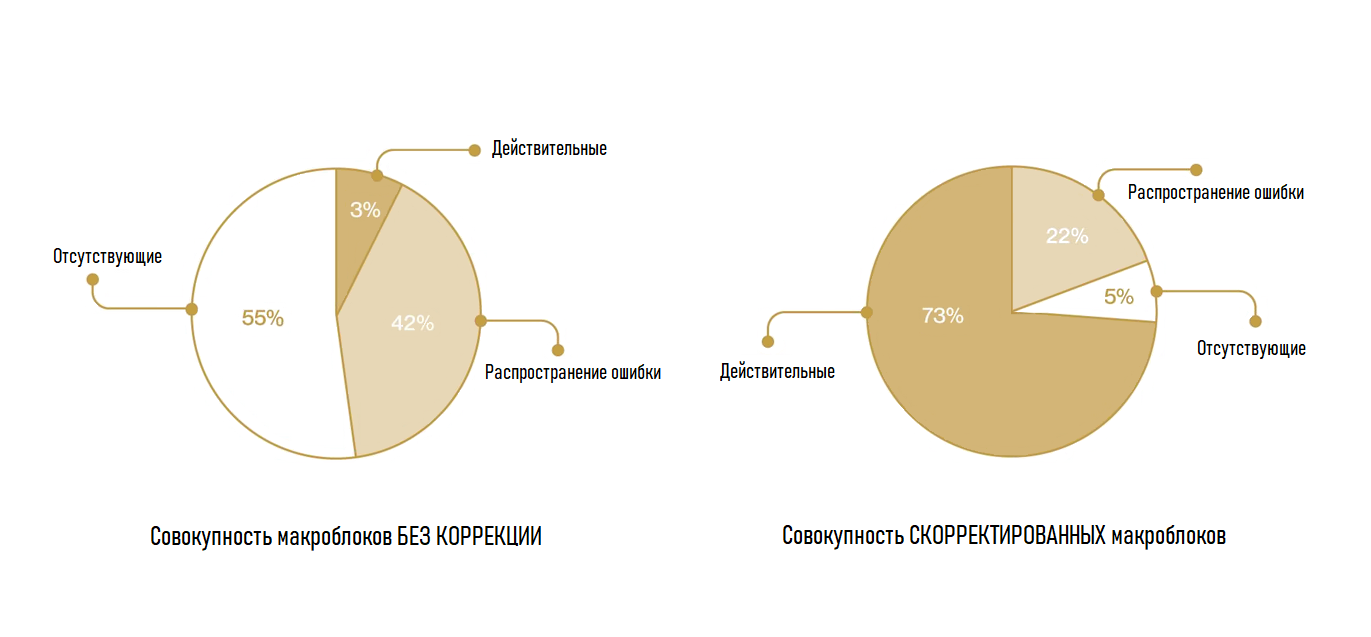
Thuật toán này làm giảm tác động trực quan của tổn thất mạng và cung cấp khả năng tương tác tất cả các bộ giải mã, đồng thời cung cấp một luồng hoàn chỉnh về mặt cú pháp: các phần bị thiếu của hình ảnh được tái tạo thành các phần bị thiếu, giống với các phần trong hình tham chiếu.
Do đó, các lỗi nằm trong những vùng dễ bị mất và không áp dụng cho toàn bộ ảnh.
Các biểu đồ bên dưới cho thấy tỷ lệ thành công khi giải mã macroblock khi mất mạng 5% - có và không có các tính năng phát trực tuyến nâng cao ANAFI Ai. Thuật toán đảm bảo giải mã chính xác 75% macroblock. Chúng cho phép người dùng tiếp tục nhiệm vụ của họ mà không làm đóng băng màn hình hoặc mất tính năng phát trực tuyến.
Kiểm soát tắc nghẽn
Thuật toán cũng đánh giá môi trường Wi-Fi và vô tuyến để dự đoán và tránh mất gói và tắc nghẽn mạng, giúp giảm độ trễ. Thuật toán dựa trên ước tính dung lượng kênh, được tính toán dựa trên tốc độ dữ liệu và tốc độ lỗi ở lớp vật lý; thì nó ảnh hưởng đến các tham số mã hóa và đóng gói mạng.
Siêu dữ liệu
Siêu dữ liệu được truyền cùng với luồng video. Đặc biệt, chúng chứa các yếu tố đo từ xa của máy bay không người lái (vị trí, độ cao, tốc độ, mức pin, v.v.) và số liệu video (góc máy ảnh, giá trị phơi sáng, trường xem, v.v.).
Đồng bộ hóa hình ảnh và siêu dữ liệu mở thực hiện các chức năng định vị chính xác trên bản đồ, theo dõi các thiết bị bay trong HUD hoặc cho phép các yếu tố thực tế tăng cường.
Siêu dữ liệu được đưa vào sử dụng các phương pháp tiêu chuẩn (phần mở rộng tiêu đề RTP); định dạng dữ liệu do Parrot xác định là nguồn mở: nó có sẵn trong ANAFI Ai SDK.
Máy ảnh

Cảm biến 48MP
Ma trận ANAFI Ai bao gồm một số lượng lớn megapixel để chụp ảnh trên không chi tiết.
Nó sử dụng công nghệ mảng bộ lọc màu của Quad Bayer, trong đó các nhóm 4 pixel liền kề có cùng màu. Do đó, có thể thu được tính năng chụp HDR theo thời gian thực ở cả chế độ ảnh và video bằng cách thêm tín hiệu từ bốn pixel liền kề.
Phạm vi động của nó gấp 4 lần so với ma trận Bayer tiêu chuẩn. Ngay cả những cảnh phức tạp cũng có thể được quay với việc làm nổi bật hoặc mất chi tiết bóng tối tối thiểu.
Ống kính
Ống kính ANAFI Ai đã được phát triển đặc biệt cho Parrot. Nó kết hợp 6 thấu kính phi cầu và được tối ưu hóa để giảm hiện tượng lóa quang học. Ống kính này cung cấp 68 ° HFoV ở chế độ video tiêu chuẩn và 64,6 ° HFoV ở chế độ ảnh tiêu chuẩn.

Chế độ video
ANAFI Ai quay video 4K mượt mà ở tốc độ 60 khung hình / giây, bao gồm P-Log và cả HDR10 4K video lên đến 30 khung hình / giây. Bảng dưới đây liệt kê tất cả các chế độ video ANAFI Ai.

Mã hóa video
Người dùng có thể chọn giữa H.264 (AVC) và H.265 (HEVC).
Tất cả các độ phân giải sử dụng các định dạng pixel sau:
- YUV420p (không gian màu 8 bpc BT.709) cho chế độ tiêu chuẩn và HDR8.
- YUVJ420p (8 bit / thành phần, toàn dải - không gian màu BT.709) cho kiểu P-log.
- YUV420p10 (không gian màu 10bpc BT.2020) để ghi HDR10, chỉ H.265.
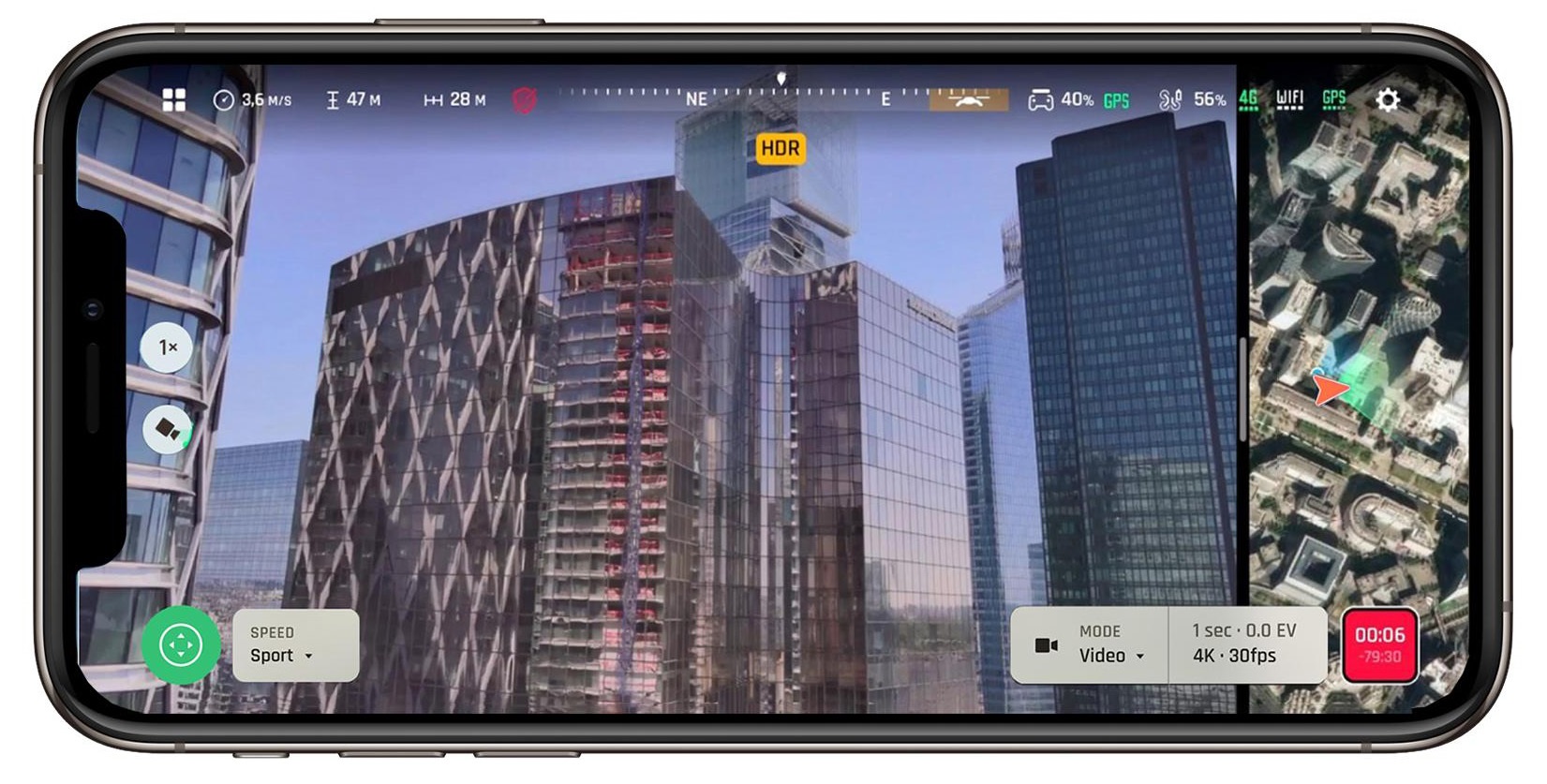
HDR
Khi quay video ở HDR8 và HDR10, ANAFI Ai bao phủ dải động 14EV. Định dạng HDR10 cung cấp độ sáng tối đa 1000 nits và độ sâu màu 10 bit. Nó cung cấp một tỷ gam màu so với 16 triệu cho dải động tiêu chuẩn. So với HDR8, HDR10 tạo ra hình ảnh sáng hơn gấp đôi với độ tương phản tăng tương ứng. HDR8 có thể được hiển thị trên bất kỳ màn hình tiêu chuẩn nào, trong khi HDR10 dành cho TV và màn hình HDR10.
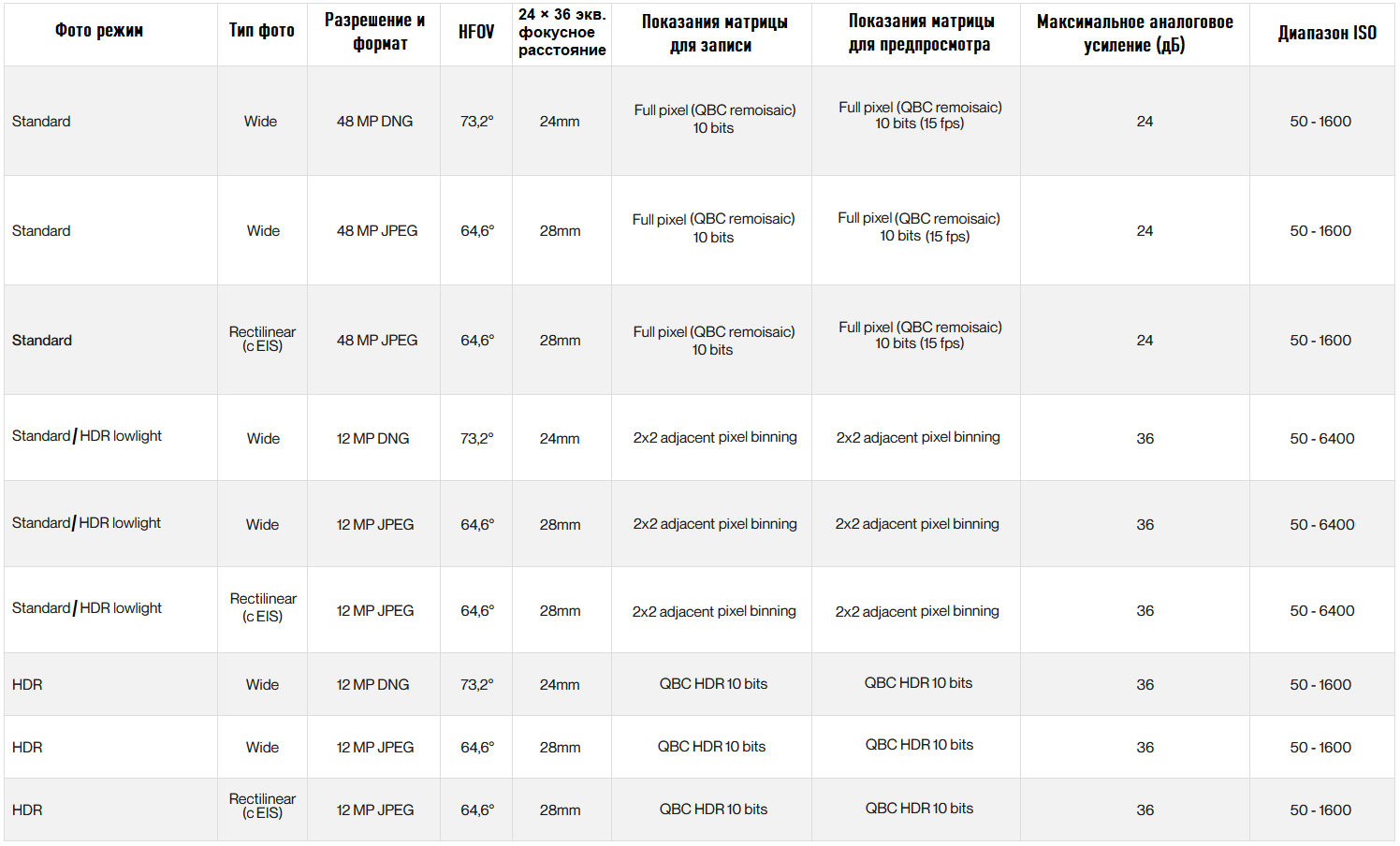
Chế độ ảnh
Mô tả chế độ
Phần Kiểm soát chế độ chứa các cài đặt ảnh hưởng đến số lượng ảnh được chụp mỗi khi nhả cửa trập.
Chế độ chụp đơn
Chế độ chụp đơn tiêu chuẩn. Sau mỗi lần nhả cửa trập, hình ảnh thu được sẽ được hệ thống xử lý ngay lập tức.
Chế độ chụp ảnh bù sáng
Người dùng có thể chụp một loạt 3, 5 hoặc 7 khung hình với các mức phơi sáng khác nhau cho mỗi khung hình. Các cài đặt trước sau có sẵn:
- [-1 EV, 0, 1 EV] (cài đặt mặc định)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

Chế độ chụp liên tục
Chế độ chụp liên tục sẽ cho phép người dùng chụp liên tục 10 khung hình trong 1 giây.
Chế độ toàn cảnh
Chế độ toàn cảnh bao gồm bốn ảnh toàn cảnh khác nhau:
- Hình cầu (360 °) là chế độ toàn cảnh bao gồm ba tùy chọn cho chụp ảnh toàn cảnh hình cầu: Sphere / Little Planet / Tunnel.
- Ngang (180 °)
- Dọc (109 °)
- Siêu rộng - siêu mới chế độ ghép 9 ảnh rộng (HFOV 110 °, toàn cảnh thẳng)
Để biết chi tiết về thông số kỹ thuật của chế độ toàn cảnh, hãy xem bảng bên dưới:

Chế độ timelapse
Chế độ này cho phép bạn chụp ảnh ở những khoảng thời gian cố định sau:
- 48MP: 1, 2, 4, 10, 30 hoặc 60 giây.
- 12MP: 0,5, 1, 2, 4, 10, 30 hoặc 60 giây.
Chế độ GPS Lapse
Chế độ ảnh này được phát triển để kiểm tra và đo ảnh. Nó cho phép bạn chụp ảnh ở các khoảng cách cố định sau: 5, 10, 20, 50, 100 hoặc 200 mét.
Bảng bên dưới hiển thị độ phân giải và chế độ chụp ảnh tĩnh, bao gồm cả chế độ Đọc cảm biến:
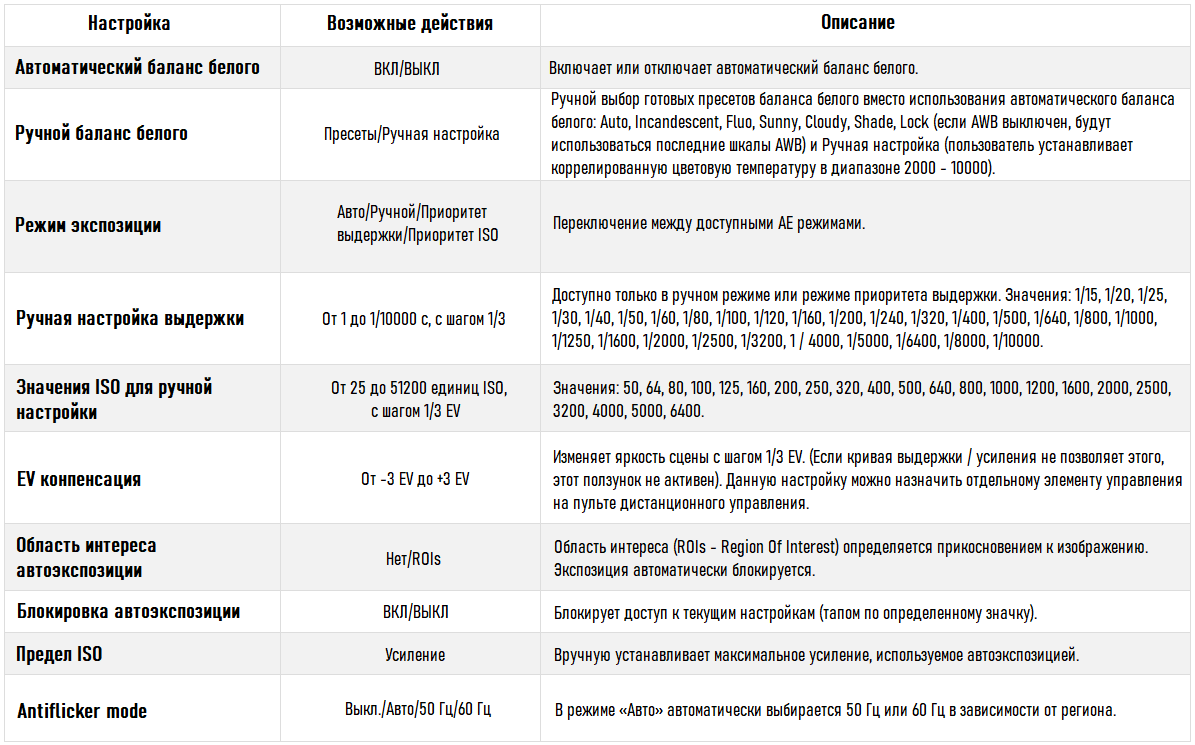
Cài đặt
Trong phần sau bảng liệt kê các cài đặt có sẵn cho mỗi chế độ.
Thu phóng 6x
Thu phóng khả dụng ở tất cả các chế độ ảnh và video. Kết hợp với cảm biến 48 megapixel, các thuật toán làm sắc nét chính xác tạo ra hình ảnh có độ nét cao ngay cả khi sử dụng zoom kỹ thuật số 6x. Người dùng ANAFI Ai giờ đây có thể nhìn thấy chi tiết 1cm từ khoảng cách 75m. Số điểm ảnh cao cũng cho phép cắt video 4K thành 1080p mà không làm giảm chất lượng.

Ổn định lai
ANAFI Ai có khả năng ổn định chính xác nhất trên thị trường UAV siêu nhỏ.
Nó kết hợp ổn định kết hợp:
- Cơ khí 3 trục (mech 3 trục. Gimbal)
- 3 trục điện tử (EIS)
Ổn định cơ học ổn định trục trỏ máy ảnh bất kể vị trí bay của máy bay không người lái. Tính năng ổn định hình ảnh điện tử khắc phục các hiệu ứng rung động vi mô đối với tần số trên 100 Hz mà ổ đĩa cơ không thể xử lý.
Gimbal của máy ảnh chính
Ổn định cơ học cho phép bạn ổn định và định hướng trục ngang của chế độ xem máy ảnh theo cả 3 trục.
 3 trục quay mech. đình chỉ của camera chính ANAFI Ai.
3 trục quay mech. đình chỉ của camera chính ANAFI Ai.
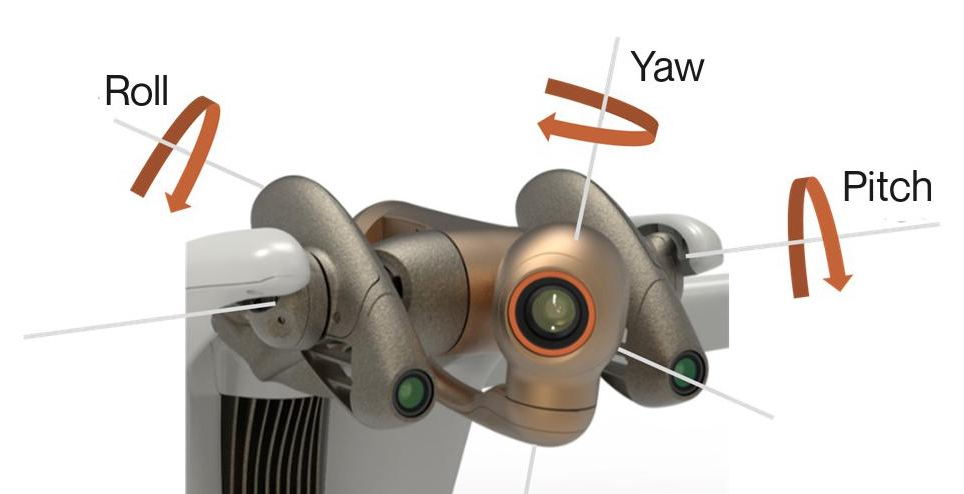
Các tính năng chính
- Gimbal cơ 3 trục cho máy ảnh chính
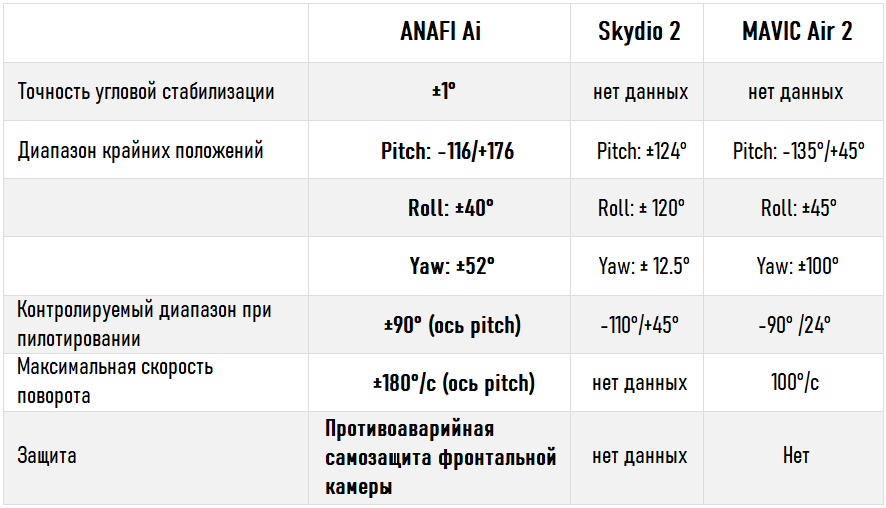
- Độ lệch dọc 292 °, Trường nhìn -116 ° đến 176 °
Hiệu suất Gimbal
- Thuật toán EIS hiệu chỉnh ảnh hưởng của hiện tượng lung lay và biến dạng của ống kính góc rộng và cũng thực hiện hình ảnh kỹ thuật số 3 trục ổn định (Roll, Pitch và Yaw).
- Phương pháp này bao gồm việc áp dụng một phép biến đổi hình học của hình ảnh. Sự biến đổi hình học gắn liền với dấu thời gian và vị trí chính xác nhờ IMU.
- Phép biến đổi hình học được áp dụng cho từng ảnh theo độ méo quang học, độ rung và chuyển động của đơn vị máy ảnh được đo.
Phạm vi quay 292 °
Máy ảnh có phạm vi xoay ngang là -116 ° / 176 ° xung quanh trục sân, do đó cung cấp khả năng quan sát ở trên và dưới mục tiêu giả, đó là một cơ hội duy nhất trên thị trường UAV siêu nhỏ.
![]()
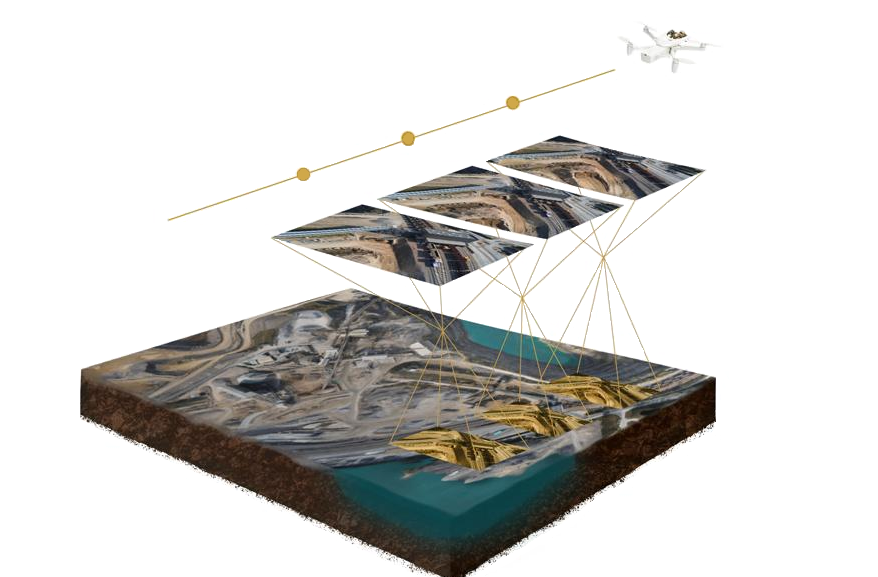
Phép đo ảnh
Chụp ảnh trên không bằng máy bay không người lái đang thay đổi cách các chuyên gia tiến hành kiểm tra và khảo sát. Phương pháp đo ảnh được sử dụng để xử lý hình ảnh do UAV thu thập để tạo ra các mô hình 2D và 3D, sau đó cho phép khách hàng lên lịch bảo trì các đối tượng được khảo sát một cách kịp thời.
4G cung cấp độ tin cậy chưa từng có của liên kết dữ liệu bay không người lái. Người dùng có thể vận hành UAV trên các khu vực rộng lớn, gần các cấu trúc kim loại, các tòa nhà mà không sợ bị mất liên lạc.
Kiểm tra và lập bản đồ
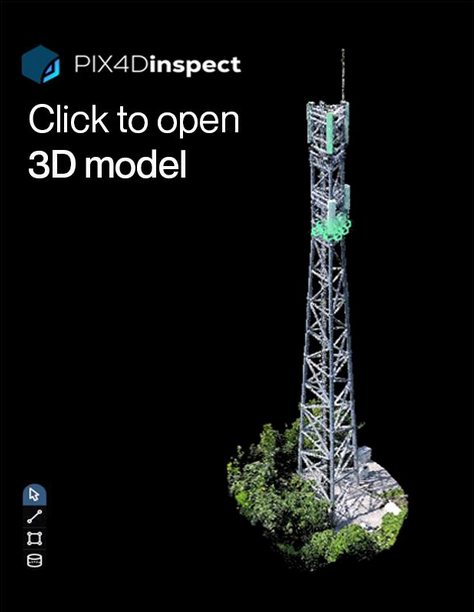
Bằng cách kết hợp AI của máy bay không người lái ANAFI Ai với nền tảng trực tuyến PIX4Dinspect, người dùng sẽ có thể tiến hành kiểm tra nhanh hơn và hiệu quả hơn bao giờ hết. hoặc. Các thuật toán học máy nhận dạng các ăng-ten trên tháp di động, xác định kích thước, chiều cao, độ nghiêng, phương vị và độ thẳng đứng của chúng.
Nhấp vào các hình ảnh bên dưới để xem các mô hình 3D demo do ANAFI Ai tạo ra.
Ví dụ # 1

Ví dụ # 2
Ma trận tốt nhất trong lớp
Máy ảnh của máy bay không người lái ANAFI Ai được trang bị cảm biến CMOS 48MP 1/2 inch được xây dựng bằng công nghệ lọc màu Quad Bayer, phù hợp hơn bao giờ hết để kiểm tra và đo quang. Ma trận được sử dụng cho phép bạn có được hình ảnh chi tiết với dải động rộng.
Ảnh độ phân giải cao
ANAFI Ai có khả năng tạo ảnh tĩnh 48 megapixel, do đó chụp tất cả các chi tiết ở độ phân giải cao và tạo ra đám mây điểm mật độ cao.
Độ sắc nét đáng kể
Nhiệm vụ kiểm tra yêu cầu khả năng xác định các chi tiết nhỏ như số sê-ri, đầu nối, vết rỉ sét và vết nứt ban đầu.
Dải động rộng
Dải động 10 điểm ở chế độ tiêu chuẩn, 14 điểm dừng ở chế độ HDR. Việc phân cấp hình ảnh tối ưu là điều cần thiết để tạo ra các điểm đám mây nhất quán và tái tạo 2D hoặc 3D chất lượng cao.
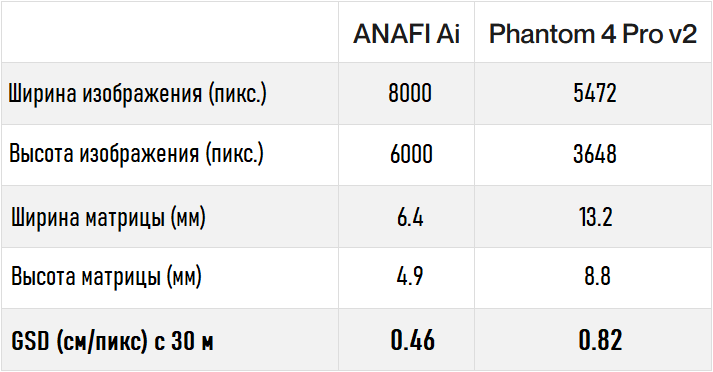
Chi tiết hơn 55% so với cảm biến 1 inch
Cảm biến Quad Bayer 48MP 1/2 inch của máy bay không người lái ANAFI Ai sắc nét hơn cảm biến 1 inch 20MP được sử dụng trong một số máy bay không người lái chuyên nghiệp hiện đại. Những hình ảnh sau đây từ việc kiểm tra mái nhà của ANAFI Ai và DJI Phantom 4 Pro V2.0 ở cùng độ cao minh chứng rõ ràng thực tế này.

Lý tưởng cho việc kiểm tra
Gimbal ANAFI Ai bao gồm hệ thống ổn định hỗn hợp 6 trục (điện tử cơ học) bù cho các dao động bay và đảm bảo độ sắc nét của hình ảnh. Máy ảnh ANAFI Ai có phạm vi điều chỉnh từ -90 ° đến 90 °, làm cho nó trở thành một công cụ lý tưởng trên không để quan sát mặt dưới của bệ cầu.
Độ nghiêng có thể điều khiển ± 90 °
Độ chính xác
ANAFI Ai cho phép người dùng đạt được GSD 0,46 cm / px từ độ cao 30 m, có nghĩa là độ chính xác tương đối lên đến 0,92 cm.
Để so sánh, ở cùng độ cao , DJI Phantom 4 Pro V2 cung cấp GSD chỉ 0,82 cm / px. Nói cách khác, ANAFI Ai có thể lập bản đồ cùng một mục tiêu, bay cao hơn Phantom 1,5 lần, với mức độ chi tiết tương đương.
Khả năng AI và 4G
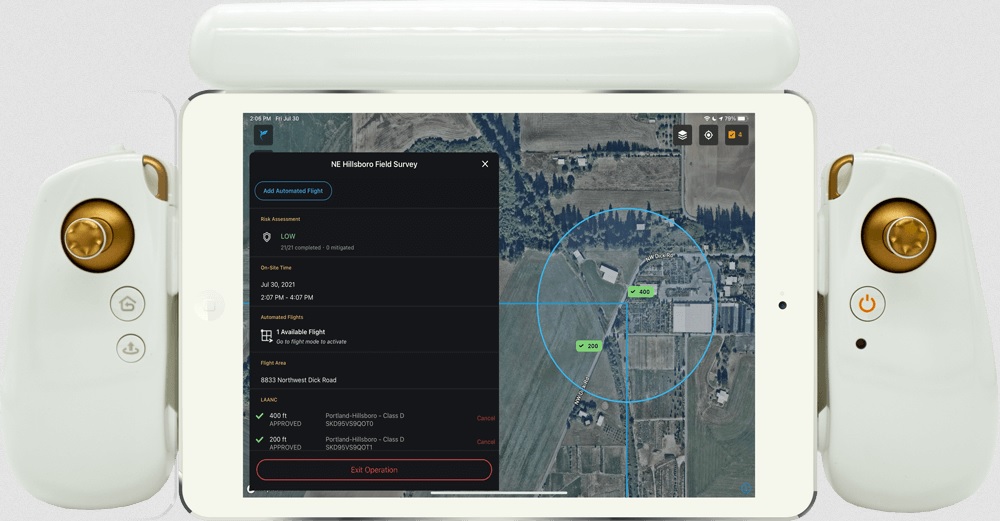
Một ứng dụng. Mọi kế hoạch bay
Tiềm năng của ứng dụng di động FreeFlight 7 cho phép người dùng khởi động tất cả các nhiệm vụ khảo sát, kiểm tra và đo ảnh.

Các chế độ bay trắc quang khả dụng
Các chế độ bay đo ảnh sau hiện khả dụng trong ứng dụng di động FreeFlight 7:
- Grid
- Lưới kép
- Сircular
Tạo kế hoạch bay chỉ bằng một lần nhấn
Tất cả những gì bạn cần trên bản đồ tương tác FreeFlight 3D là tất cả những gì bạn cần để quét tòa nhà nhanh chóng. Trí tuệ nhân tạo tự động xác định các thông số và quỹ đạo bay tối ưu. Hình ảnh 48MP với tham chiếu địa lý chính xác của cảm biến ANAFI Ai (IMU, GNSS và Thời gian bay) cho phép tái tạo 3D chính xác.
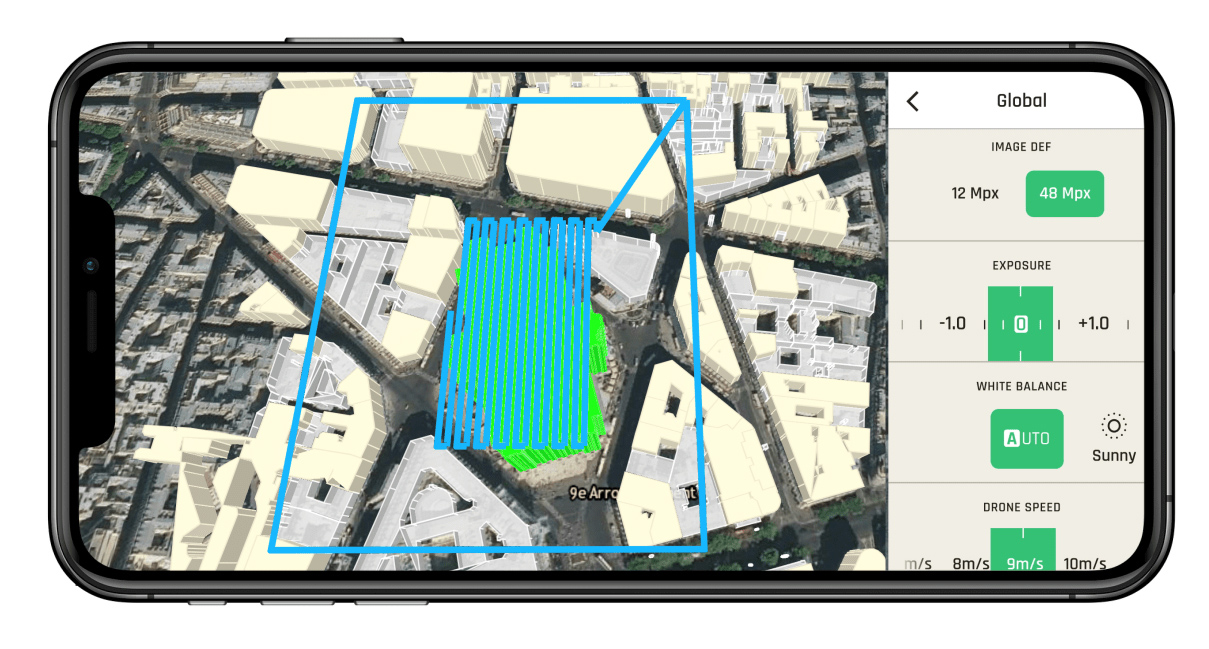 Kế hoạch bay tự động được tạo bằng một lần nhấn trong đăng ký đất liền 3D.
Kế hoạch bay tự động được tạo bằng một lần nhấn trong đăng ký đất liền 3D.
- Nền bản đồ của FreeFlight 7 là từ phần mềm ArcGIS. Biểu diễn tòa nhà 3D dựa trên dữ liệu OpenStreetMap bao gồm các thành phố trên khắp thế giới.
- Hệ thống trực quan đảm bảo an toàn cho một kế hoạch bay nhất định: người dùng không cần phải lo lắng về các chướng ngại vật. ANAFI Ai tự chủ tránh chúng.
Chuyến bay tự động
Hệ thống cảm biến đa hướng ANAFI Ai, dựa trên tầm nhìn lập thể, tự động định hướng theo hướng di chuyển.

Máy bay không người lái phát hiện chướng ngại vật cách xa 30 mét. Công nghệ AI liên tục xây dựng và cập nhật lưới nạp trong khi thực hiện một kế hoạch bay nhất định. Nó đại diện cho môi trường bay không người lái trong voxels.
Các thuật toán xác định quỹ đạo tốt nhất để tránh va chạm với chướng ngại vật, trong khi máy bay không người lái vẫn tập trung vào mục tiêu của nó: nhiệm vụ bay được giao.

Kết nối 4G
ANAFI Ai là microdron thương mại đầu tiên được trang bị mô-đun 4G. Nó bao gồm hơn 98% tần số được sử dụng trên toàn thế giới.

Khảo sát đường dây điện cao thế. Được chụp bằng ANAFI Ai, được chỉnh sửa bằng Pix4Dmatic. Kích thước cảnh: 4060 × 60 × 70 m. Số lượng ảnh: 2172. GSD: 1,3 cm / pix. Chiều cao: 90 m. Độ trùng mặt trước / bên: 90% / 65%.
Máy bay không người lái có thể chuyển đổi liền mạch từ Wi-Fi sang 4G và ngược lại, do đó cung cấp kết nối đáng tin cậy nhất, do đó đảm bảo:
- Khả năng thực hiện các chuyến bay BVLOS
- Kết nối ổn định ngay cả khi bay trong môi trường có chướng ngại vật và tòa nhà
- Bay an toàn trong môi trường có tiếng ồn cao
- Chất lượng liên kết video 1080p @ 30 khung hình / giây
- Tải trực tiếp hình ảnh lên máy chủ đám mây

Tối ưu hóa thời gian bay
Theo nhà phát triển, tiết kiệm thời gian đáng kể đã đạt được do hiệu suất của hình ảnh ANAFI Ai:
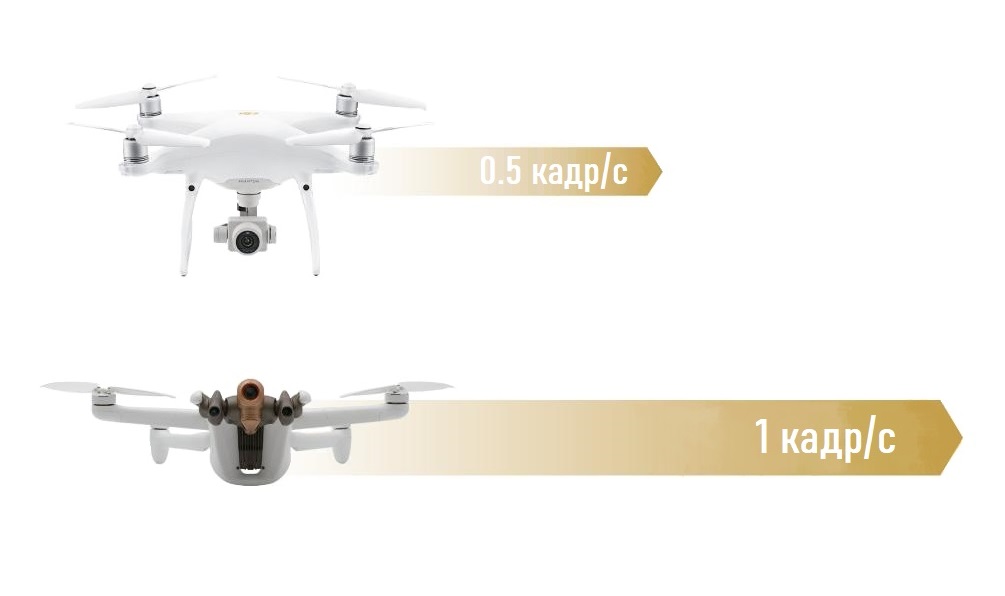
- 48MP cho phép máy bay không người lái bay cao hơn 1,5 lần so với máy bay không người lái có cảm biến 1 inch 20MP, trong khi đạt cùng GSD. Nói cách khác, độ cao cao hơn và nhiệm vụ nhanh hơn đi đôi với nhau.
- Chụp ảnh 1 khung hình / giây: ANAFI Ai chụp nhanh gấp đôi Autel EVO 2 và DJI Phantom 4 Pro V2.0.
Truyền 4G trong chuyến bay tới PIX4Dcloud
Trong quá trình tạo mô hình kỹ thuật số từ ảnh chụp từ máy bay không người lái, truyền tệp và xử lý ảnh là hai công việc tốn thời gian. ANAFI Ai giúp người dùng tăng tốc quy trình làm việc của họ. Đặc biệt, hệ thống máy bay không người lái cho phép:
- Truyền hình ảnh đến các máy chủ bảo mật trực tiếp trong chuyến bay bằng kết nối 4G của máy bay không người lái.
- Ngay lập tức bắt đầu tính toán các đối tượng khi kết thúc chuyến bay: chỉnh hình, đám mây điểm, mô hình độ cao và lưới kết cấu.
- Dễ dàng chia sẻ bản đồ 2D và mô hình 3D khảo sát chất lượng với nhân viên và khách hàng.
![]()
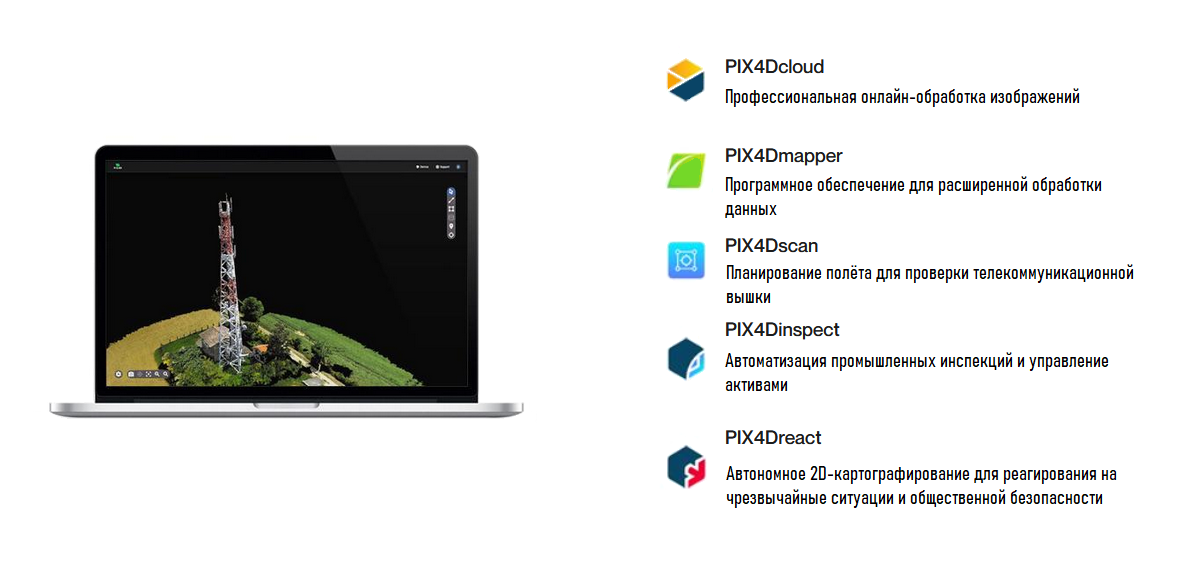
Khả năng tương thích PIX4D Suite
ANAFI Ai hiện tương thích hoàn toàn với một bộ ứng dụng đo quang điện thoại di động, máy tính để bàn và đám mây độc nhất bao gồm:
Photogrammetry hay lidar
Tại sao chọn photogrammetry để khảo sát, khảo sát? Ngoài khả năng tiếp cận và dễ sử dụng, phép đo quang trên không là lựa chọn tốt nhất khi cần giải thích trực quan dữ liệu.
Ưu điểm về phép đo quang
- Cung cấp nhiều hình ảnh trực quan: trực quan, đám mây điểm màu, lưới kết cấu.
- Tạo ra một đám mây điểm có mật độ cao hơn, mỗi điểm chứa một lượng thông tin đáng kể (chiều cao, kết cấu, màu sắc).
- Vượt qua LIDAR về độ chính xác của kết xuất 2D và 3D chân thực - LIDAR không cung cấp mức độ chi tiết theo ngữ cảnh cao.
Nhược điểm của LIDAR
- Chi phí gấp 100 lần so với một UAV có ma trận RGB.
- Sự phức tạp của việc xử lý dữ liệu và các lỗi diễn giải có thể xảy ra.
- Việc thêm thông tin màu sắc là có thể thực hiện được, nhưng nó làm phức tạp quá trình.
- LIDAR chỉ tạo đám mây điểm và dành cho các trường hợp và tình huống cụ thể.
SDK
Bộ phát triển phần mềm Parrot là một bộ công cụ và phần mềm mã nguồn mở dành cho các nhà phát triển. Kể từ khi chiếc máy bay không người lái đầu tiên A. R. Drone, phần mềm nguồn mở của công ty làm nền tảng cho các nền tảng và công cụ dành cho nhà phát triển, và Parrot
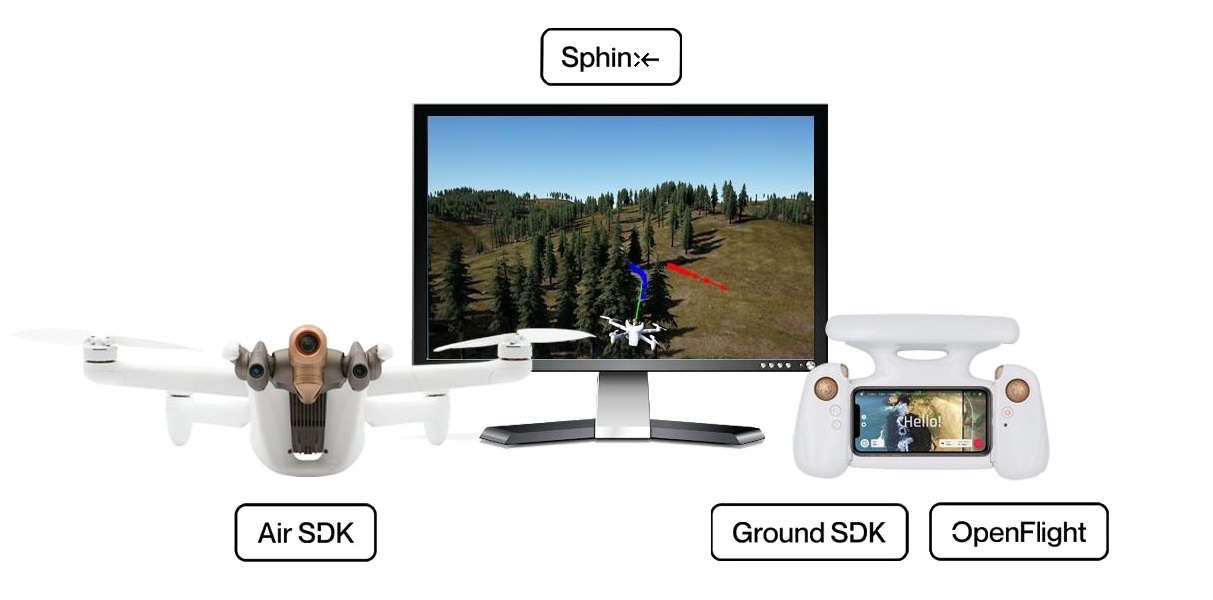
Nhà phát triển giải thích rõ rằng tất cả các tài nguyên SDK của công ty đều có sẵn miễn phí, không cần đăng ký và theo dõi, trên cổng thông tin " Parrot Cổng thông tin dành cho nhà phát triển"... Bạn cũng có thể tham gia cùng hàng nghìn nhà phát triển trên diễn đàn Parrot, nơi bạn có thể thảo luận trực tiếp về các chủ đề hiện tại với các kỹ sư của công ty.
Air SDK
Chạy mã của bạn trên ANAFI Ai
Air SDK cung cấp một kiến trúc công nghệ mang tính cách mạng để tải xuống và chạy mã trực tiếp tại ANAFI Ai. Các nhà phát triển có thể lập trình các nhiệm vụ bay được thiết kế tùy chỉnh với quyền truy cập vào tất cả các cảm biến bay không người lái, giao diện kết nối và chức năng lái tự động.
Air SDK cung cấp quyền truy cập trên máy bay vào:
- Tất cả các cảm biến (IMU, GPS, TOF) và chế độ bay
- Luồng video và siêu dữ liệu với tất cả các máy ảnh
- Giao diện kết nối Wi-Fi, 4G, USB
- Bản đồ độ sâu và lưới lấp đầy
- Tạo quỹ đạo tránh chướng ngại vật
Bất kỳ nhà phát triển nào cũng có thể:
- Thay đổi trạng thái của máy bay không người lái bằng cách tạo các nhiệm vụ bay
- Thay đổi chế độ điều hướng
- Thêm các quy trình Linux nhúng (cho ví dụ: truyền dữ liệu qua kênh 4G hoặc sử dụng thị giác máy tính)
Air SDK hỗ trợ ngôn ngữ lập trình C hoặc Python. Air SDK đi kèm với hướng dẫn cài đặt chi tiết và tài liệu API. Nhiều ví dụ ứng dụng minh họa tất cả các khả năng được cung cấp bởi kiến trúc độc đáo của nó.
SDK mặt đất
Xây dựng ứng dụng di động mạnh mẽ
SDK mặt đất là nền tảng phần mềm Trạm điều khiển mặt đất (GCS) dành cho thiết bị di động (cả iOS và Android đều được hỗ trợ). Nó cho phép bất kỳ nhà phát triển nào tạo ứng dụng di động cho ANAFI Ai để điều khiển máy bay không người lái tiếp theo trực tiếp từ thiết bị di động. Tất cả các chức năng BVS (điều khiển, video, cài đặt) đều có sẵn thông qua một API dễ sử dụng và được ghi lại đầy đủ.
OpenFlight
Trạm điều khiển mặt đất nguồn mở
Lần đầu tiên, Parrot mở mã nguồn cho ứng dụng trạm điều khiển mặt đất của nó. OpenFlight là cốt lõi của ứng dụng FreeFlight 7 mã nguồn mở nổi tiếng của chúng tôi. Điều này cho phép nhà phát triển tập trung vào việc thêm chức năng của riêng họ và ngay lập tức có một ứng dụng trông chuyên nghiệp sẵn sàng xuất bản lên AppStore.

OpenFlight chứa:
- Tất cả UX FreeFlight 7
- Tất cả cài đặt giao diện
- Mã để hiển thị 3D theo thời gian thực về chướng ngại vật
- Mã để quản lý truyền thông 4G
- OpenFlight được xuất bản theo giấy phép BSD-3 với hướng dẫn cài đặt hoàn chỉnh và tài liệu toàn diện.
Sphinx
3D Photorealistic Simulation
Parrot Sphinx là một công cụ mô phỏng máy bay không người lái tiên tiến. Các kỹ sư vẹt sử dụng nó để phát triển và thử nghiệm tất cả các tính năng của ANAFI Ai. Khái niệm chung là mô phỏng phần sụn thực tế của máy bay không người lái với tất cả các cảm biến của nó trong môi trường thực tế trực quan và vật lý.

Parrot Sphinx cho phép:
- Mô phỏng tất cả máy ảnh và cảm biến
- Mô phỏng bản đồ độ sâu và phân đoạn hình ảnh
- Điều hướng nhiều cảnh 3D thực tế
- Kết nối với các loại điều khiển từ xa khác nhau
- Sử dụng tập lệnh để điều khiển mô phỏng
- Thêm người đi bộ và xe cộ
- Trực quan hóa và ghi lại dữ liệu chuyến bay
- Điều chỉnh cảm biến máy bay và các yếu tố vật lý xung quanh
- Kiểm soát hệ số thời gian thực
Parrot Sphinx được xây dựng trên cơ sở tiêu chuẩn tiên tiến thành phần:
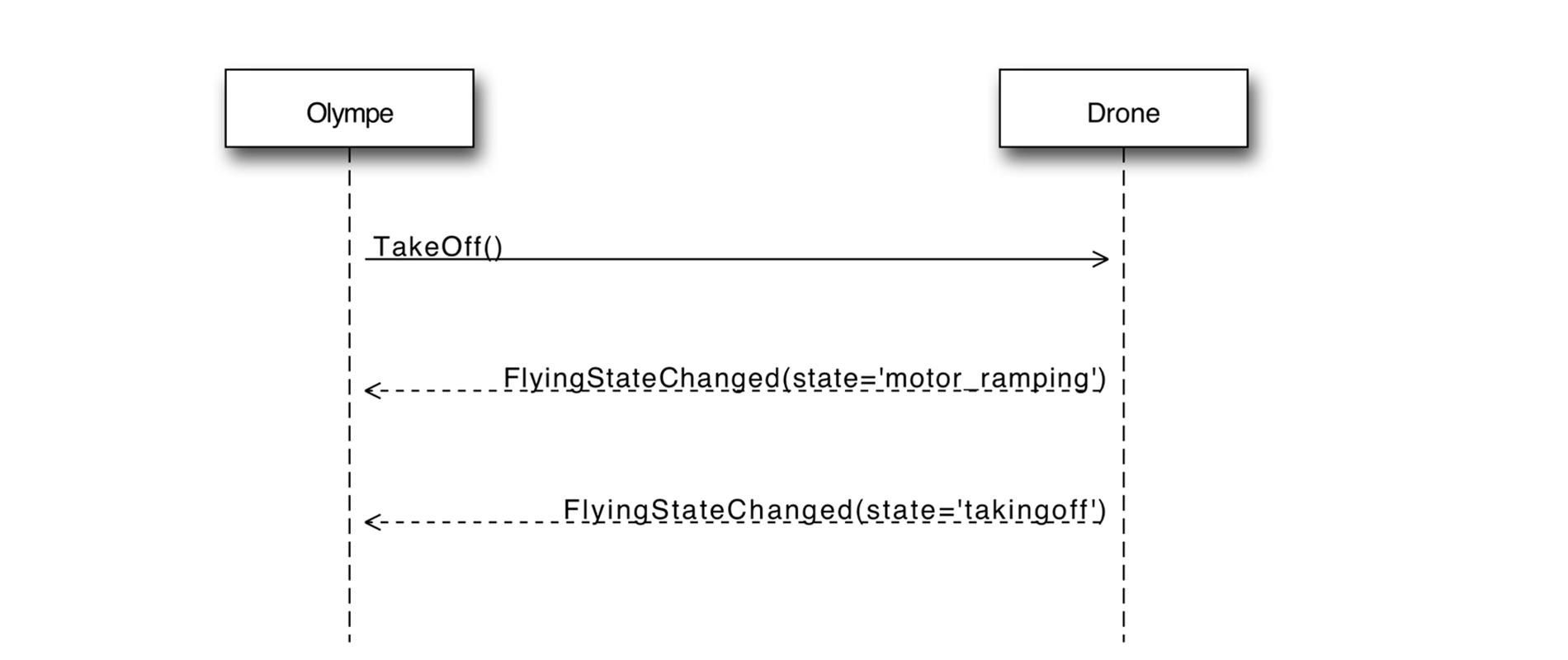
Olympe
Python để điều khiển ANAFI Ai
Olympe cung cấp giao diện lập trình điều khiển Python cho ANAFI Ai. Mục đích ban đầu của Olympe là tương tác với môi trường mô hình Sphinx. Olympe cũng có thể điều khiển ANAFI Ai vật lý từ một máy tính từ xa.
Khung Olympe cho phép:
- Kết nối với ANAFI Ai
- Gửi tin nhắn lệnh (thí điểm, hướng máy ảnh, Trở về nhà, Kế hoạch chuyến bay)
- Bắt đầu và dừng phát trực tuyến video từ tất cả các máy ảnh
- Ghi lại luồng video và siêu dữ liệu được đồng bộ hóa
PdrAW
Advanced Media Player
PDrAW là trình xem video nâng cao cho ANAFI Ai media. Trình xem hỗ trợ cả phát trực tuyến (RTP / RTSP) và video đã ghi (MP4) trên nền tảng Linux, macOS, Android và iOS. PDrAW xuất hiện dưới dạng một thư viện (libpdraw), một thư viện trình bao bọc (libpdraw-backend) và một tệp thực thi độc lập (pdraw).
PDrAW cũng quản lý siêu dữ liệu video. Trên ANAFI Ai, cả video phát trực tuyến và video đã ghi đều bao gồm siêu dữ liệu có sẵn công khai và được lập thành tài liệu, cho phép xử lý video trên không nâng cao.
Người mẫu C. A. D.
Parrot cung cấp mô hình 3D của máy bay không người lái của họ để tích hợp vào thiết kế CAD của bạn nhằm tạo mẫu nhanh và tích hợp phụ kiện.
Tương thích MAVLink và GUTMA
ANAFI Ai tương thích với giao thức MAVLink v1 mã nguồn mở tiêu chuẩn, cho phép trao đổi dữ liệu thời gian thực giữa UAV và trạm điều khiển. ANAFI Ai có thể được điều khiển bằng tay hoặc sử dụng lập kế hoạch chuyến bay tự động từ một trạm gốc tương thích với MAVLink như QGroundControl.
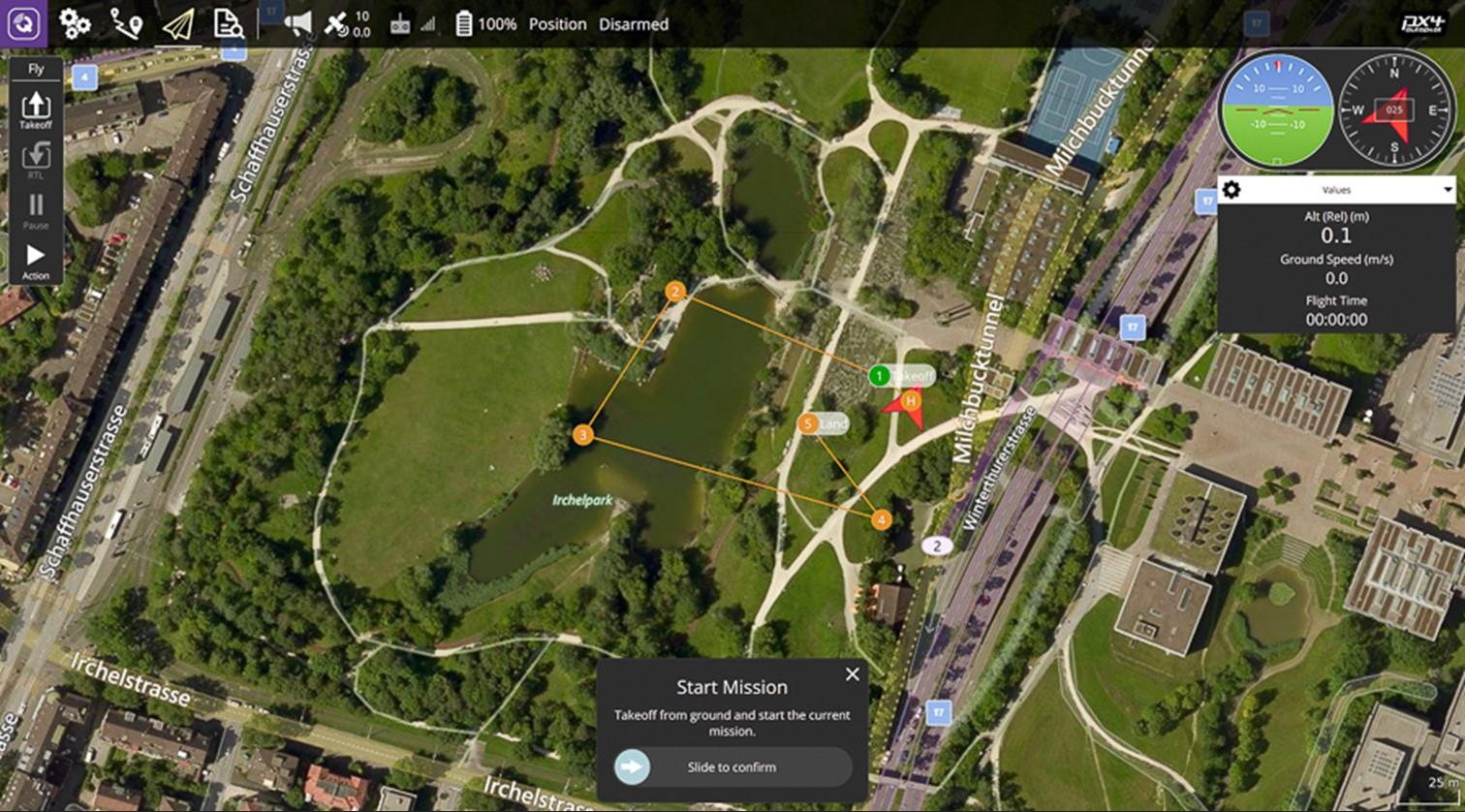
* Giao diện QGroundControl
ANAFI Ai tương thích với giao thức dữ liệu chuyến bay chuẩn nguồn mở GUTMA. Hiệp hội UTM toàn cầu là một tập hợp các công ty lớn trong lĩnh vực kiểm soát không lưu.

Hệ sinh thái đối tác lớn nhất dành cho máy bay không người lái Parrot
Parrot tiếp tục mở rộng hệ sinh thái toàn cầu của các nhà cung cấp phần mềm cho máy bay không người lái thông qua chương trình SDK đối tác của mình. cung cấp các giải pháp chuyên biệt và độc đáo cho nhu cầu ngày càng tăng và phát triển của người dùng chuyên nghiệp.
Parrot cho mọi nhu cầu kinh doanh
Để tận dụng tối đa quy trình kiểm tra, Parrot cung cấp cho khách hàng một hệ sinh thái gồm phần mềm bay không người lái tương thích, từ quản lý đội bay, chuyến bay tổng hợp lập kế hoạch và nhập nhật ký chuyến bay, trước khi chụp, lập bản đồ, giám sát và phân tích dữ liệu nhận được.
PIX4D × Parrot
Ứng dụng mô hình 2D / 3D. Một bộ ứng dụng đo quang điện thoại di động, máy tính để bàn và đám mây độc đáo.
Verizon x Skyward x Parrot
Giải pháp bay không người lái 4G LTE tại Hoa Kỳ. Máy bay không người lái ANAFI Ai đầu tiên của loại hình này được kết nối với mạng Verizon 4G LTE với phần mềm Skyward được cài đặt sẵn. Mở ra cánh cửa để truyền dữ liệu gần thời gian thực, triển khai từ xa và các chuyến bay xa tầm nhìn.

Skyward × Parrot
Tích hợp và học hỏi trong khả năng ANAFI. Nền tảng quản lý hàng không bao gồm không phận, quyền truy cập LAANC, và đào tạo, thiết bị và kết nối để triển khai đội bay không người lái của doanh nghiệp.

DroneSense × Parrot
Xây dựng, quản lý và mở rộng các chương trình bay không người lái của bạn. Các chuyên gia thiết bị bay không người lái trong lĩnh vực an toàn công cộng có thể sử dụng toàn bộ các tính năng của DroneSense, được thiết kế đặc biệt cho nhu cầu của những người phản ứng đầu tiên.

Đối tác hệ sinh thái vẹt

Chương trình liên kết vẹt
Nhà phát triển đề xuất mở rộng khả năng của chương trình của anh ấy dành cho máy bay không người lái bằng cách tích hợp SDK của họ.
An ninh mạng
Bảo mật dữ liệu
Nhà phát triển lưu ý rằng anh ta không thu thập bất kỳ dữ liệu nào mà không có sự đồng ý của người dùng. Quyết định có chuyển dữ liệu sang cơ sở hạ tầng Parrot hay không hoàn toàn phụ thuộc vào chính người dùng. Dữ liệu được lưu trữ trong Parrot cho phép người dùng đồng bộ hóa dữ liệu chuyến bay và kế hoạch bay giữa các thiết bị khác nhau, cũng như tạo điều kiện hỗ trợ và cho phép Parrot cải tiến sản phẩm của mình.
ANAFI Ai tuân thủ Quy định chung về bảo vệ dữ liệu của Liên minh Châu Âu (GDPR) và đi xa hơn, ví dụ: cho phép bạn xóa tất cả dữ liệu trong 1 lần nhấp, do đó cung cấp cho người dùng khả năng kiểm soát dễ dàng nhất. Vấn đề với một cú nhấp chuột này được giải quyết trong ứng dụng di động FreeFlight7 hoặc trong cài đặt quyền riêng tư của tài khoản Parrot. Cloud. Vì vậy, người dùng bất cứ lúc nào không chỉ có thể ngừng trao đổi dữ liệu mà còn có thể dễ dàng yêu cầu xóa của họ.
Nếu người dùng đồng ý với việc trao đổi dữ liệu, quá trình xử lý của họ sẽ được thực hiện ở định dạng hoàn toàn minh bạch, được mô tả chi tiết trong Chính sách quyền riêng tư của Parrot.
Khi ANAFI Ai được kết nối với Skycontroller 4 qua 4G, cơ sở hạ tầng Parrot được sử dụng để ghép nối máy bay không người lái và bộ điều khiển từ xa. Nếu người dùng chưa đăng nhập vào tài khoản Parrot. Cloud, anh ta vẫn có thể sử dụng kết nối 4G với một tài khoản tạm thời duy nhất. Khi sử dụng cơ sở hạ tầng của Parrot để ghép nối 4G, video được mã hóa bằng khóa được thỏa thuận giữa máy bay không người lái và bộ điều khiển từ xa, Parrot không có quyền truy cập vào video không được mã hóa.

Tuân thủ FIPS140-2 và Phần tử bảo mật CC EAL5
ANAFI Ai có phần tử bảo mật Wisekey được tích hợp sẵn tuân thủ NIST Chứng nhận FIPS140-2 Cấp độ 3 và Tiêu chí Chung EAL5. Một phần tử bảo mật tương tự cũng được tích hợp trong phần cứng điều khiển Skycontroller 4.
Chức năng của phần tử bảo mật:
- Thực hiện các hoạt động mật mã
- Lưu trữ và bảo vệ thông tin bí mật
Nó sử dụng khóa riêng ECDSA với các tham số miền P521, duy nhất cho mỗi máy bay không người lái. Nó không thể được trích xuất từ phần tử bảo mật. Và chứng chỉ liên quan đến khóa này được ký bởi tổ chức cấp chứng chỉ.
Wisekey bảo vệ tính toàn vẹn của phần sụn, cung cấp khả năng nhận dạng máy bay không người lái duy nhất để ghép nối 4G và xác thực mạnh, cũng như chữ ký kỹ thuật số duy nhất của ảnh do máy bay không người lái chụp.

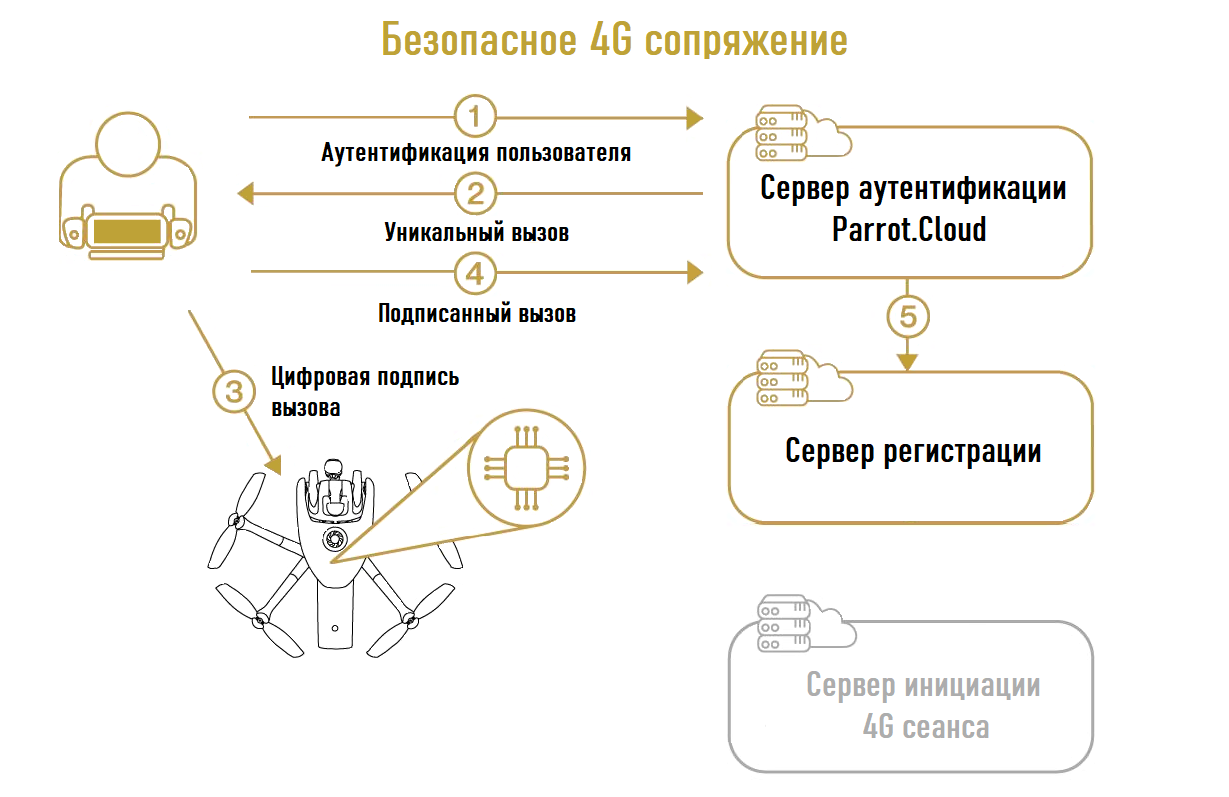
Kết nối 4G an toàn và xác thực mạnh
quá trình ghép nối thiết bị một cách an toàn. Trong quá trình này, người dùng xác nhận một cách đáng tin cậy rằng anh ta được kết nối với một máy bay không người lái cụ thể. Nhờ Yếu tố bảo mật ANAFI Ai, anh ta có thể làm điều này mà không cần nhập mật khẩu bên trong máy bay không người lái.
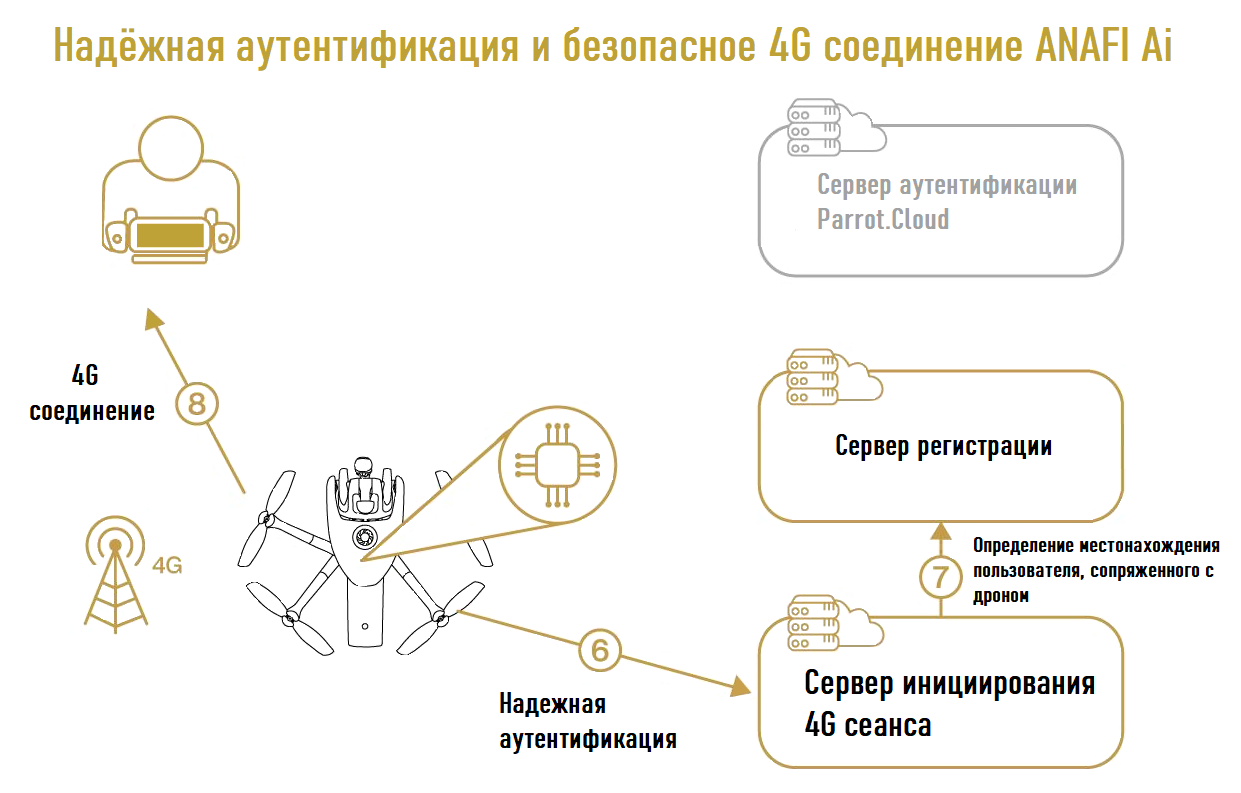
Các máy chủ Parrot sau đó đăng ký giao tiếp giữa người dùng và máy bay không người lái. Khi mất kết nối Wi-Fi giữa người dùng và máy bay không người lái, ANAFI Ai sẽ tự động chuyển sang kết nối 4G. ANAFI Ai thực hiện xác thực mạnh mẽ trên máy chủ Parrot bằng cách sử dụng khóa riêng được lưu trữ trên Phần tử bảo mật. Máy chủ Parrot tìm kiếm người dùng được kết nối và cung cấp giao diện giữa ANAFI Ai và Skycontroller 4.
Để bảo vệ khả năng điều khiển máy bay không người lái và các luồng video đến với Skycontroller 4, ANAFI Ai hỗ trợ các giao thức TLS, DTLS và SRTP.
Khởi động và cập nhật an toàn
Trình tự khởi động máy bay được bảo vệ: hệ thống kiểm tra rằng nó sử dụng phần mềm Parrot và phần mềm này không bị giả mạo. Kiểm tra bảo mật được thực hiện trên mỗi lần khởi tạo. Dịch vụ cập nhật cũng kiểm soát chữ ký điện tử của các bản cập nhật phần mềm.
Thiết lập khóa người dùng trên Phần tử bảo mật
Người dùng ANAFI Ai có quyền truy cập vào tài khoản nhà điều hành đặc biệt Phần tử bảo mật. Tài khoản này được sử dụng để thiết lập các khóa có liên quan đến người dùng này. Người dùng có thể định cấu hình Phần tử bảo mật bằng khóa công khai của các nhà cung cấp sứ mệnh mà họ tin tưởng. ANAFI Ai sẽ chỉ thực hiện các nhiệm vụ được ký kết bằng các khóa này. Quá trình này ngăn những kẻ tấn công thực hiện các nhiệm vụ bay độc hại trên máy bay không người lái.
Ảnh được ký kỹ thuật số
Yếu tố bảo mật từ ANAFI Ai có thể ký kỹ thuật số hình ảnh bay không người lái. Chữ ký này là bằng chứng cho thấy:
- Hình ảnh có chữ ký được chụp bởi một máy bay không người lái được chỉ định.
- Cả bản thân hình ảnh và siêu dữ liệu của nó đều chưa được xử lý (tự nguyện hoặc không) - siêu dữ liệu, còn được gọi là EXIF và XMP, chứa thông tin về ngày, giờ và vị trí của hình ảnh.

Nói cách khác, chữ ký điện tử bảo vệ tất cả dữ liệu liên quan đến hình ảnh, bao gồm địa điểm và thời gian khi nó được chụp và ANAFI Ai bay.
Người dùng cũng như các đối tác cung cấp giải pháp phần mềm sử dụng chụp ảnh bằng máy bay không người lái có thể xác minh chữ ký số của ảnh ANAFI Ai bằng chứng chỉ máy bay không người lái hoặc thông qua danh mục khóa công khai do Parrot cung cấp.
Tính minh bạch và liên tục kiểm tra bảo mật với Bug bounty
Parrot sử dụng các giao thức và định dạng tệp tiêu chuẩn bất cứ khi nào có thể. Không có mã bị xáo trộn hoặc các tính năng ẩn. Điều này cho phép người dùng hiểu cách hoạt động của các sản phẩm Parrot và kiểm tra độ an toàn của chúng. Ngoài ra, OpenFlight, phần mềm được sử dụng để điều khiển máy bay không người lái, là mã nguồn mở, cho phép người dùng kiểm soát hoàn toàn.
Vào tháng 4 năm 2021, Parrot ra mắt Chương trình tiền thưởng lỗi với YesWeHack, nền tảng bảo mật nguồn lực cộng đồng đầu tiên ở Châu Âu. Thông qua quan hệ đối tác này, Parrot thúc đẩy cộng đồng nghiên cứu an ninh mạng rộng lớn của YesWeHack để xác định các lỗ hổng tiềm ẩn trong máy bay không người lái, ứng dụng di động và dịch vụ web của họ.
Chương trình tiền thưởng lỗi bao gồm hai giai đoạn:
Các chương trình tư nhân ban đầu cung cấp quyền truy cập độc quyền cho các nhà nghiên cứu bảo mật được chọn và bao gồm các mẫu máy bay không người lái Parrot trong tương lai. Kinh nghiệm và kỹ năng đa dạng của các nhà nghiên cứu sẽ khẳng định mức độ bảo mật cao của sản phẩm trước khi đưa ra thị trường, điều này sẽ giúp cải thiện sự an toàn của người dùng Parrot và bảo vệ dữ liệu của họ.
Sau vòng đầu tiên của chương trình Bug Bounty riêng tư này và sau khi thương mại hóa, các sản phẩm sẽ được đưa vào chương trình công khai. Bảo mật của chúng sau đó được kiểm tra nghiêm ngặt bởi toàn bộ cộng đồng YesWeHack gồm hơn 22.000 nhà nghiên cứu an ninh mạng.

Quản lý dữ liệu
Parrot Cloud cho phép người dùng chọn chia sẻ dữ liệu của họ để quản lý dữ liệu chuyến bay và đội bay, cũng như đa phương tiện dữ liệu nhận được bởi máy bay không người lái của họ.
Dữ liệu thu thập
Đám mây vẹt thu thập 4 loại dữ liệu:
Tĩnh (dữ liệu sản phẩm):
- Máy bay số sê-ri
- Số sê-ri pin
- Phiên bản phần mềm máy bay và pin
- Phiên bản phần cứng pin và máy bay
- Kiểu thiết bị
- Bản phát hành FreeFlight 7 Phiên bản
Sự kiện
- Cảnh báo: Pin, Autopilot, Sensors
- Giao tiếp: kết nối / ngắt kết nối, bắt đầu phát trực tuyến, cảnh báo nhiễu, tín hiệu yếu
- Máy ảnh: thống kê phát trực tuyến, thay đổi cài đặt
- Chuyến bay: thay đổi trạng thái (cất cánh, hạ cánh, di chuột, v.v.), kích hoạt nhiệm vụ bay (kế hoạch bay, đo ảnh)
"Hình ảnh theo ngữ cảnh"
- Timelapse- ảnh chụp nhanh và (2 phút một lần)
- Học sâu (lập bản đồ nhiều vật thể, phong cảnh hơn để cải thiện khả năng tự chủ của chuyến bay, theo dõi, tránh chướng ngại vật)
- Âm thanh nổi (bản đồ độ sâu)
- Hình ảnh được kích hoạt bởi sự kiện
- Bắt đầu và kết thúc câu lệnh di chuột chính xác, hạ cánh chính xác
- Sự cố máy bay không người lái
- Các khuôn mặt tự động bị làm mờ trong quá trình truyền
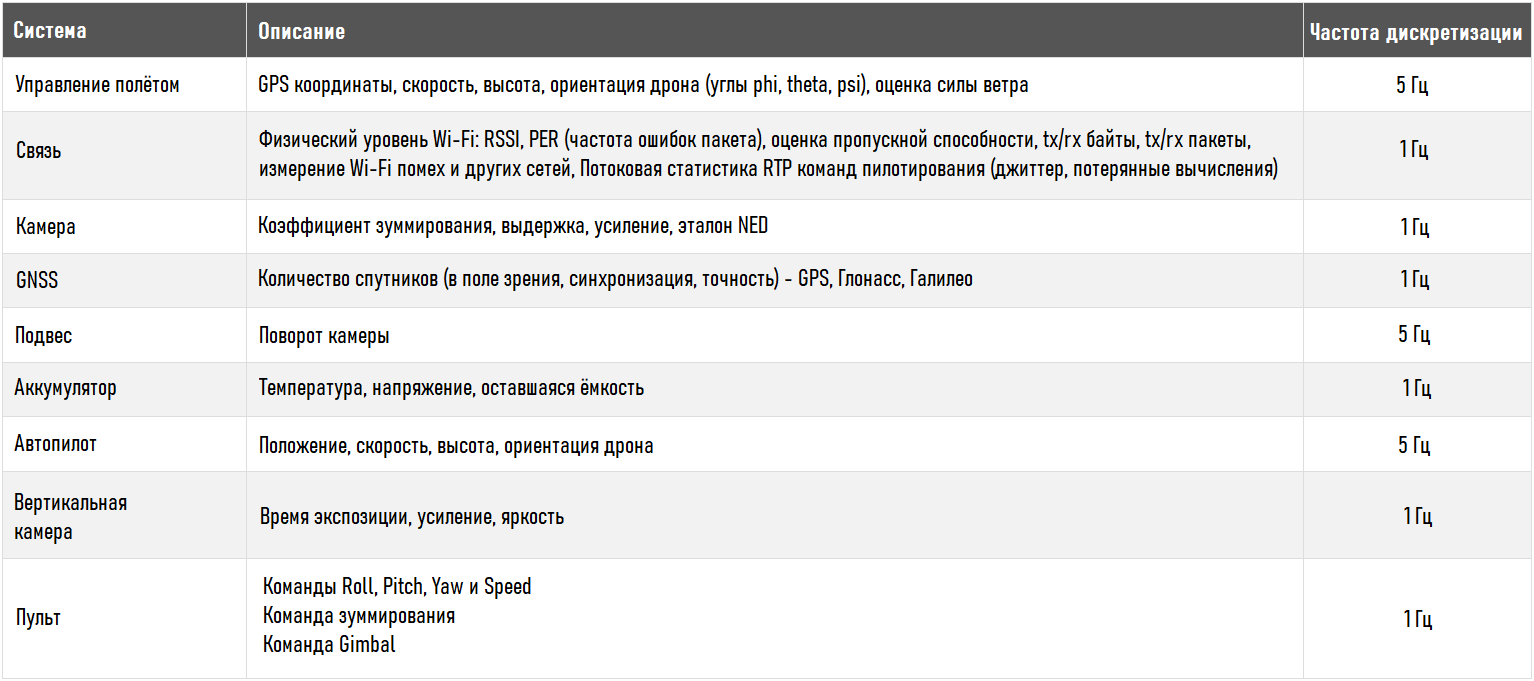
Phép đo từ xa
Sử dụng cuối cùng dữ liệu đã thu thập
Parrot chỉ thu thập và sử dụng dữ liệu từ những khách hàng đã đồng ý chia sẻ để cải thiện chất lượng các sản phẩm của nó...
Quản lý bảo trì
Bảo trì phòng ngừa: Các công cụ của chúng tôi thu thập tất cả thông tin liên quan đến nhiệm vụ (loại nhiệm vụ, thời gian cất cánh và hạ cánh, số lượng nhiệm vụ, vị trí của máy bay không người lái, tốc độ bay, kế hoạch chuyến bay và cài đặt AirSDK). Điều này cho phép bạn nhận được thông tin chính xác về trạng thái của phi đội máy bay không người lái ANAFI Ai (cũng như bộ điều khiển và pin của chúng) trong thời gian thực.
Bảo trì sửa chữa: Thông tin thu thập được rất hữu ích để nhanh chóng xác định trạng thái của một máy bay không người lái hoặc pin cụ thể.
Tăng cường trí tuệ nhân tạo (AI)
Các yếu tố AI của ANAFI Ai (PeleeNet, mạng phức hợp, v.v.) cung cấp cho người dùng các dịch vụ và tính năng vô song: tránh chướng ngại vật, theo dõi mục tiêu, một số chế độ bay. Chất lượng của AI phụ thuộc vào số lượng và chất lượng của dữ liệu được thu thập (hình ảnh và video): dữ liệu này cung cấp cho máy học. Về mặt này, chất lượng dữ liệu không phải là yếu tố quyết định duy nhất: siêu dữ liệu được liên kết với dữ liệu này cũng là yếu tố cơ bản. Vì lý do này, công cụ của chúng tôi thu thập hình ảnh và siêu dữ liệu thường xuyên và tùy thuộc vào các sự kiện, với tổng số 30 đến 50 MB mỗi phút.
Đặc điểm chuyến bay
Đặc điểm khí động học
Truyền động và khí động học
 Hình ảnh CFD của các cánh chân vịt ANAFI Ai
Hình ảnh CFD của các cánh chân vịt ANAFI Ai
Các cánh chân vịt mô phỏng sinh học mới với hình ảnh cá voi đầu gù giống như lưng gù. Cách tiếp cận này có thể làm tăng hiệu suất đẩy của nhà máy điện, mà ở đầu ra tạo ra sự gia tăng lực đẩy ở cùng tốc độ quay. Hiệu ứng này có thể so sánh với việc tăng đường kính rôto.
Tiếng ồn âm thanh, đặc biệt là tiếng ồn âm, phát ra từ mép trước cũng được giảm bớt. Do đó ANAFI Ai yên tĩnh hơn [71,5 dB SPL (A) ở 1 m] so với Skydio 2 [76,4 dB SPL (A) ở 1 m].
- Thời gian bay hơn 32 phút
- Nhờ các đặc tính khí động học được tối ưu hóa của thân máy bay và hệ thống đẩy ANAFI Ai, tốc độ tối đa khi bay về phía trước là 61 km / h, với chuyến bay phụ và bay lùi 58 km / h
- Tối đa. sức cản gió 12,7 m / s.
- Nhờ hiệu suất mô-men xoắn cao của động cơ / cánh quạt và khả năng tự chủ của pin cao, phạm vi hoạt động là 22,5 km (ở tốc độ không đổi 50 km / h trong điều kiện thời tiết yên tĩnh).
 Hình ảnh CFD của chùm ANAFI Ai
Hình ảnh CFD của chùm ANAFI Ai
Cảm biến
Để đảm bảo chuyến bay an toàn ANAFI Ai được trang bị:
- 2 × IMU (ICM-40609-D và ICM42605)
- Magnetometer LIS2MDL
- Mô-đun GPS UBX-M8030
- TI OPT3101 thời gian bay (ToF)
- Khí áp kế LPS22HB
- Máy ảnh dọc
Đặc điểm cảm biến
Flight IMU: ICM-40609-D
- Con quay hồi chuyển 3 trục
- Phạm vi: ± 2000 ° / s
- Độ phân giải: 16,4 LSB / ° / s
- Độ lệch / Độ chính xác: ± 0,05 ° / s (sau khi hiệu chuẩn nhiệt và động)
- Gia tốc kế 3 trục
- Phạm vi: ± 16g
- Độ phân giải: 2.048 LSB / mg
- Chênh lệch / độ chính xác: ± 0,5 mg (XY) ± 1 mg (Z) (sau khi hiệu chuẩn nhiệt và động)
- Kiểm soát nhiệt độ s: hệ thống sưởi được kiểm soát liên quan đến nhiệt độ môi trường, ổn định trong khoảng: ± 0,15 ° C
- Tần số đo: 2 kHz
Từ kế: LIS2MDL [1189)]
- Phạm vi: ± 49.152G
- Độ phân giải: 1,5 mG
- Độ lệch / Độ chính xác: ± 15 mG (sau khi bù, ở tốc độ động cơ tối đa)
- Tần số đo: 100 Hz
Khí áp kế: LPS22HB 1
- Phạm vi: 260 đến 1260 hPa
- Độ phân giải: 0,0002 hPa
- Chênh lệch / độ chính xác: ± 0,1 hPa
- Kiểm soát nhiệt độ: hệ thống sưởi được kiểm soát liên quan đến nhiệt độ môi trường, ổn định trong khoảng: ± 0,2 ° C
- Tần số đo: 75 Hz
- Tiếng ồn đo: 20 cm RMS
GNSS: UBX-M8030 1
- Ăng ten miếng gốm 25 × 25 × 4 mm, cho phép cải thiện mức tăng 2 dB so với ANAFI 1
- Độ nhạy: khởi động nguội -148 dBm / theo dõi và điều hướng: -167 dBm
- Thời gian khắc phục lỗi đầu tiên: 40 giây
- Độ chính xác / Độ chính xác: Vị trí (độ lệch chuẩn 1,4 m), Vận tốc (độ lệch chuẩn 0,5 m / s)
Máy ảnh dọc
- Cảm biến hình ảnh định dạng: 1/6 inch
- Độ phân giải: 640 × 480 pixel
- Cảm biến hình ảnh với màn trập toàn cầu
- Đen trắng
- FOV: Góc xem ngang: 53,7 ° / góc xem dọc: 41,5 °
- Tiêu cự: 2,8 mm
- Đo tốc độ của luồng quang trên mặt đất ở 60 Hz
- 15Hz & độ phù hợp chính xác @ 5Hz
ToF: TI OPT3101
- Phạm vi: 0-15m
- Độ phân giải: 0,3 mm
- Sự chính xác b: ± 2 cm (sau khi hiệu chuẩn)
- Tần số đo: 64 Hz
Máy ảnh dọc IMU: ICM-42605
- Con quay hồi chuyển 3 trục
- Phạm vi: ± 2000 ° / s
- Độ phân giải: 16,4 LSB / ° / s
- Độ lệch / độ chính xác: ± 0,1 ° / s (sau động Hiệu chuẩn)
- Gia tốc kế 3 trục
- Phạm vi: ± 16g
- Độ phân giải: 2.048 LSB / mg
- Độ lệch / Độ chính xác: ± 2.0 mg (XY) ± 5,0 mg (Z) - sau khi hiệu chuẩn động
- Tần số đo: 1 kHz
- Đồng bộ phần cứng với máy ảnh dọc, độ chính xác: 1 μs
Autopilot
ANAFI Ai Flight Controller cung cấp khả năng lái đơn giản và trực quan: không cần đào tạo để vận hành nó. Nó cho phép bạn tự động hóa nhiều chế độ bay (Kế hoạch bay, Quay phim, Cất cánh bằng tay, RTH thông minh). Các thuật toán tổng hợp cảm biến kết hợp dữ liệu từ tất cả các cảm biến để ước tính tỷ lệ ANAFI Ai, độ cao, vị trí và vận tốc.
Đánh giá tình trạng là điều cần thiết để máy bay không người lái hoạt động bình thường. Quadcopters vốn không ổn định khi bộ điều khiển bay được sử dụng với một vòng lặp mở; để điều khiển chúng một cách dễ dàng, chưa kể đến điều khiển tự trị, cần phải ổn định chúng bằng cách sử dụng các thuật toán điều khiển vòng kín. Các thuật toán này tính toán và gửi các lệnh đến các động cơ theo yêu cầu của ANAFI Ai để đạt được quỹ đạo mong muốn.

Chuyến bay trong nhà
Khi không có tín hiệu GPS, ANAFI Ai chủ yếu dựa vào các phép đo camera dọc để ước tính tốc độ và vị trí. Hiệu suất của máy ảnh dọc được xác định bởi hai thuật toán chính:
- Luồng quang học để ước tính tốc độ
- Phát hiện và đối sánh điểm chính để ước tính vị trí
Máy ảnh dọc các thuật toán có thể hoạt động trong điều kiện ánh sáng yếu nhờ ANAFI Ai được trang bị một cặp đèn LED nằm bên cạnh camera dọc. Chúng cho phép máy bay không người lái duy trì ổn định, đặc biệt là khi bay trong nhà hoặc khi không có GPS, ở độ cao dưới 5m so với mặt đất. Sức mạnh của đèn LED tự động thích ứng, tùy thuộc vào nhu cầu của thuật toán.
Tự động bay
Các tính năng chính
- Hệ thống cảm biến quay với trường nhìn rộng
- Khai thác độ sâu của không gian xung quanh dựa trên căn chỉnh âm thanh nổi và độ sâu theo chuyển động
- Biểu diễn môi trường dưới dạng lưới lấp đầy
- Tự động phát hiện và tránh chướng ngại vật tại tốc độ lên đến 29 km / h
Chương này trình bày chi tiết về các cảm biến, phần cứng và thuật toán được ANAFI Ai sử dụng để cho phép bay tự hành. Nó được tổ chức như sau:
- Mô tả chi tiết về hệ thống nhận thức ANAFI Ai
- Các thuật toán tri giác được sử dụng để tái tạo lại môi trường 3D xung quanh máy bay không người lái
- tránh

Chiến lược hệ thống cảm nhận
Nhận thức về môi trường ba chiều là khả năng chính để đạt được chuyến bay tự động, đặc biệt là trong không gian hạn chế. Đây là điều kiện tiên quyết để đảm bảo phát hiện và tránh chướng ngại vật, giúp giảm gánh nặng cho người điều khiển máy bay không người lái, tăng khả năng thành công của nhiệm vụ và đảm bảo an toàn cho máy bay.
Phát huy hết tiềm năng của một máy ảnh bay, có thể di chuyển tự do và xoay theo mọi hướng mà không bị hạn chế, đòi hỏi một giải pháp cảm biến hiệu quả. Đặc biệt, hệ thống cảm biến phải có thể nhận thông tin về môi trường theo các hướng tương ứng với chuyển động tịnh tiến trong chuyến bay - bất kể hướng của máy ảnh là gì.
ANAFI Ai dựa trên một giải pháp kỹ thuật độc đáo dựa trên hai gimbal cơ học để tách hướng của máy ảnh chính và hệ thống cảm biến:
- Máy ảnh chính được gắn trên 3 trục gimbal, làm cho nó định hướng 3D độc lập với định hướng của máy bay không người lái.
- Hệ thống cảm biến được gắn trên gimbal một trục - được kết nối với chuyển động ngáp của máy bay không người lái, nó có thể được định hướng theo bất kỳ hướng nào.
 Bộ ổn định kép ANAFI Ai cho nhận thức và hình dung.
Bộ ổn định kép ANAFI Ai cho nhận thức và hình dung.
Trục nghiêng của hai giá treo thẳng hàng và kết hợp với nhau để đạt được thiết kế siêu nhỏ gọn.
Nhờ giải pháp này, có thể hướng camera chính và hệ thống cảm biến theo hai hướng khác nhau. Thiết kế này tránh việc sử dụng các máy ảnh đắt tiền ở các cạnh, trên, dưới và phía sau của máy bay không người lái trong khi vẫn cung cấp một trường nhìn có sẵn lớn cho hệ thống cảm biến.
Phần này được tổ chức như sau:
- Chi tiết về các cảm biến được sử dụng cho hệ thống cảm biến
- Thông số kỹ thuật cho cả gimbal của máy ảnh chính và gimbal của hệ thống cảm biến
- Các chiến lược nhắm mục tiêu hệ thống cảm biến để khai thác tiềm năng của cấu trúc hệ thống treo kép
Bộ cảm biến
Hệ thống cảm biến dựa trên một cặp máy ảnh giống hệt nhau với một trục cao độ...
 Bản lề cơ học 1 trục cho hệ thống cảm biến ANAFI Ai.
Bản lề cơ học 1 trục cho hệ thống cảm biến ANAFI Ai.
Thông số kỹ thuật của cảm biến như sau:
- Model: Onsemi AR0144CSSM28SUD20
- Màu sắc: Đơn sắc
- Độ phân giải: 1280 × 800 pixel
- Tốc độ khung hình: 30 khung hình / giây
- Màn trập toàn cầu
- Trường xem ngang hoàn toàn: 118 ° (110 ° có thể sử dụng để cảm biến)
- Trường xem toàn bộ theo chiều dọc: 72 ° (có thể sử dụng 62 ° để cảm biến)
- Tiêu cự: 1,47 mm (0,039 inch - 492,94610 pixel)
- Khẩu độ: f / 2,7
Thông số kỹ thuật các cặp lập thể như sau:
- Trục quảng cáo chung
- Đường cơ sở / Khoảng cách: 62 mm (2,44 inch)
- Chụp đồng bộ ở tốc độ 30 khung hình / giây

Gimbal kép
Gimbal cơ học của máy ảnh chính là trục quay cơ học 3 trục l-yaw "với các tính năng sau:
- Giới hạn độ cao: -116 ° / 176 °
- Giới hạn cuộn: / - 36 °
- Giới hạn góc nghiêng: / - 48 °
Hệ thống treo cơ học của hệ thống cảm biến là một hệ thống treo trục đơn với các đặc điểm sau:
- Điểm dừng cuối ở cao độ: -107 ° / 204 °
- Thời gian di chuyển từ điểm dừng cuối này đến điểm dừng đầu kia: 300 mili giây
Hệ thống cảm biến có hành trình 311 ° (trong đó 296 ° không bị che bởi thân máy bay không người lái), cho phép nhận thức lạc hậu.
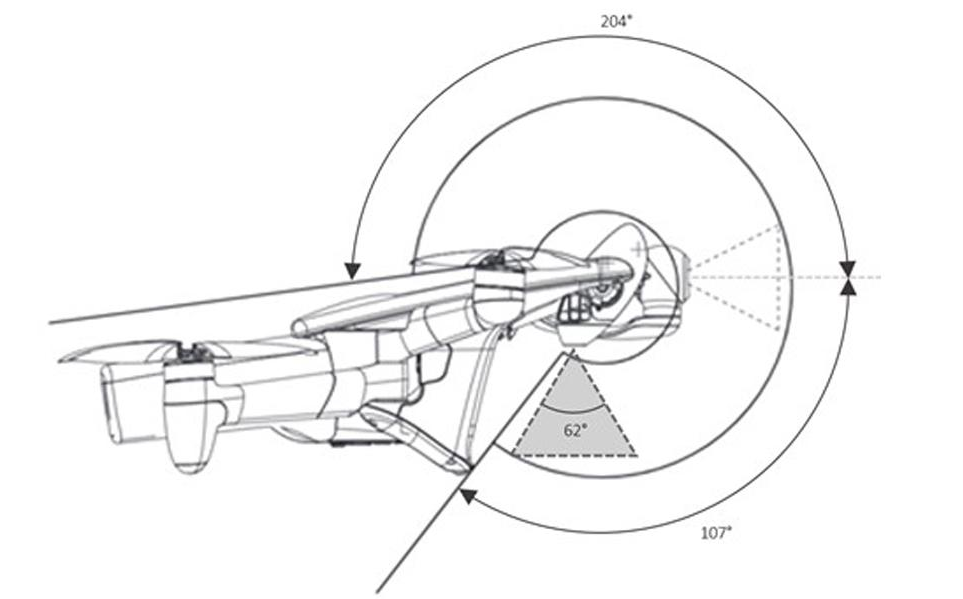
Trường nhìn thẳng đứng tức thời và hệ thống giới hạn của nhận thức ANAFI Ai.
Hệ thống được thiết kế theo cách:
- Cánh chân vịt không lọt vào trường nhìn của máy ảnh chính
- máy ảnh không che trường nhìn của hệ thống cảm nhận
- Máy ảnh chính và hệ thống cảm biến có thể được gập lại hoàn toàn để bảo vệ ống kính
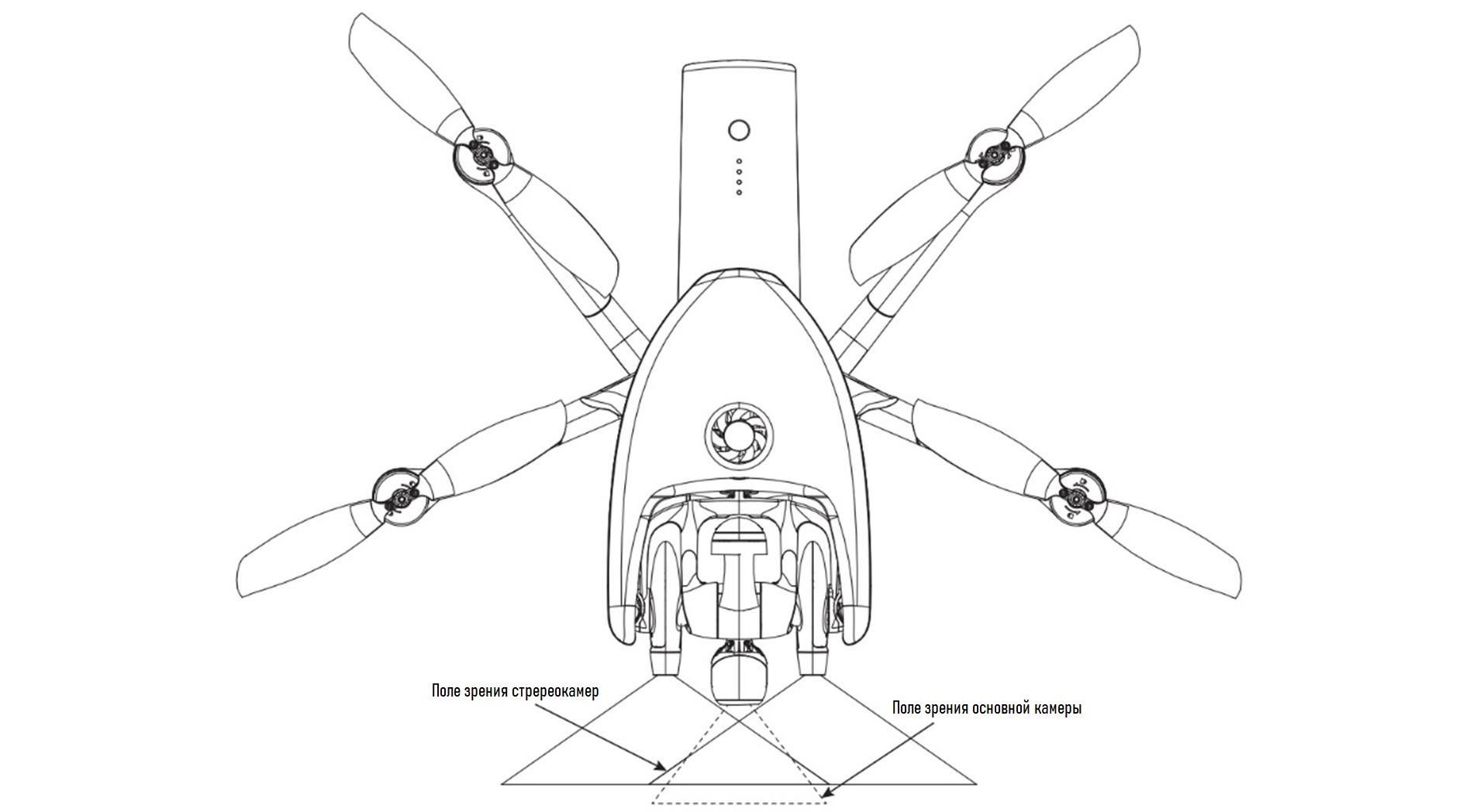 Trường nhìn ngang của hệ thống nhận thức ANAFI Ai.
Trường nhìn ngang của hệ thống nhận thức ANAFI Ai.
Khi ngả người về phía sau, hệ thống tri giác di chuyển đến vị trí trên cùng, do đó cung cấp một cái nhìn rõ ràng.
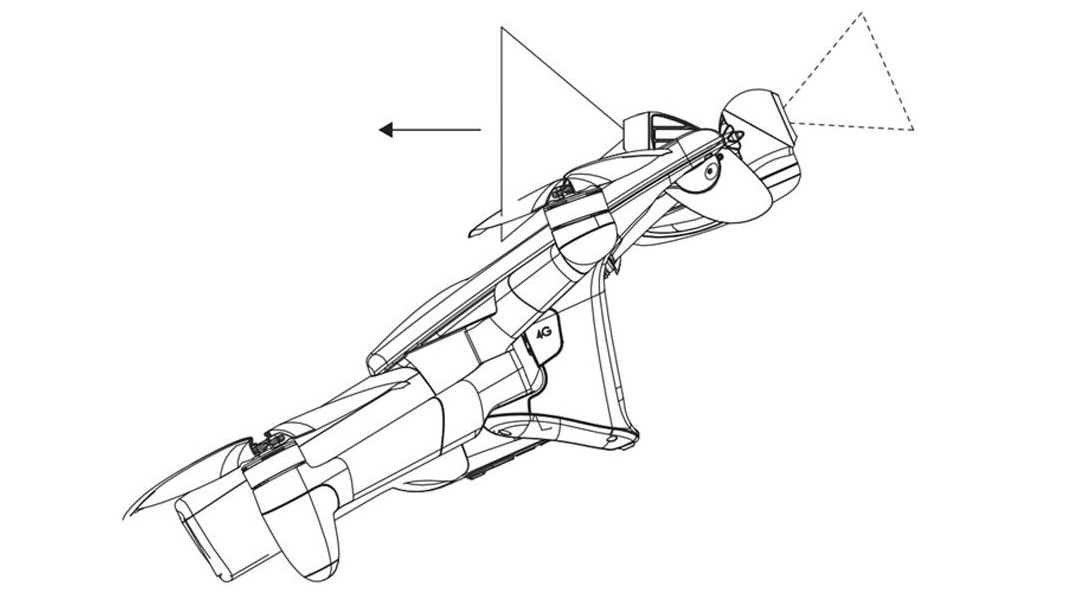
Cảm nhận của ANAFI Ai ở vị trí ngả hẳn ra để bay lùi.
Tái tạo môi trường
Tái tạo môi trường ba chiều xung quanh cho chuyến bay tự hành được thực hiện trong hai giai đoạn:
- Trích xuất thông tin độ sâu từ nhận thức dưới dạng bản đồ độ sâu
- Kết hợp dữ liệu bản đồ độ sâu thành một lưới ba chiều lấp đầy
Hai phương pháp được sử dụng để thu được bản đồ độ sâu từ nhận thức cảm biến:
- Độ sâu dựa trên căn chỉnh âm thanh nổi
- Độ sâu từ chuyển động
Độ sâu từ tương ứng âm thanh nổi
Phương pháp trích xuất chính thông tin độ sâu dựa trên thị sai giữa hai camera âm thanh nổi của hệ thống cảm nhận. Bằng cách chụp ảnh môi trường theo một hướng, nhưng từ hai vị trí khác nhau, các đối tượng trong trường quan sát của hệ thống nhận thức sẽ xuất hiện ở các vị trí khác nhau trong ảnh do hai máy ảnh thu được. Chủ thể càng gần thì sự khác biệt về vị trí càng lớn.
Do đó, chiến lược là xác định các điểm trong hình ảnh thu được bởi các camera stereo bên trái và bên phải tương ứng với cùng một đối tượng trong trường nhìn của hệ thống cảm biến và đo sự khác biệt về vị trí của các điểm trong hai hình ảnh. Sự khác biệt này được gọi là sự chênh lệch và được đo bằng số lượng pixel.
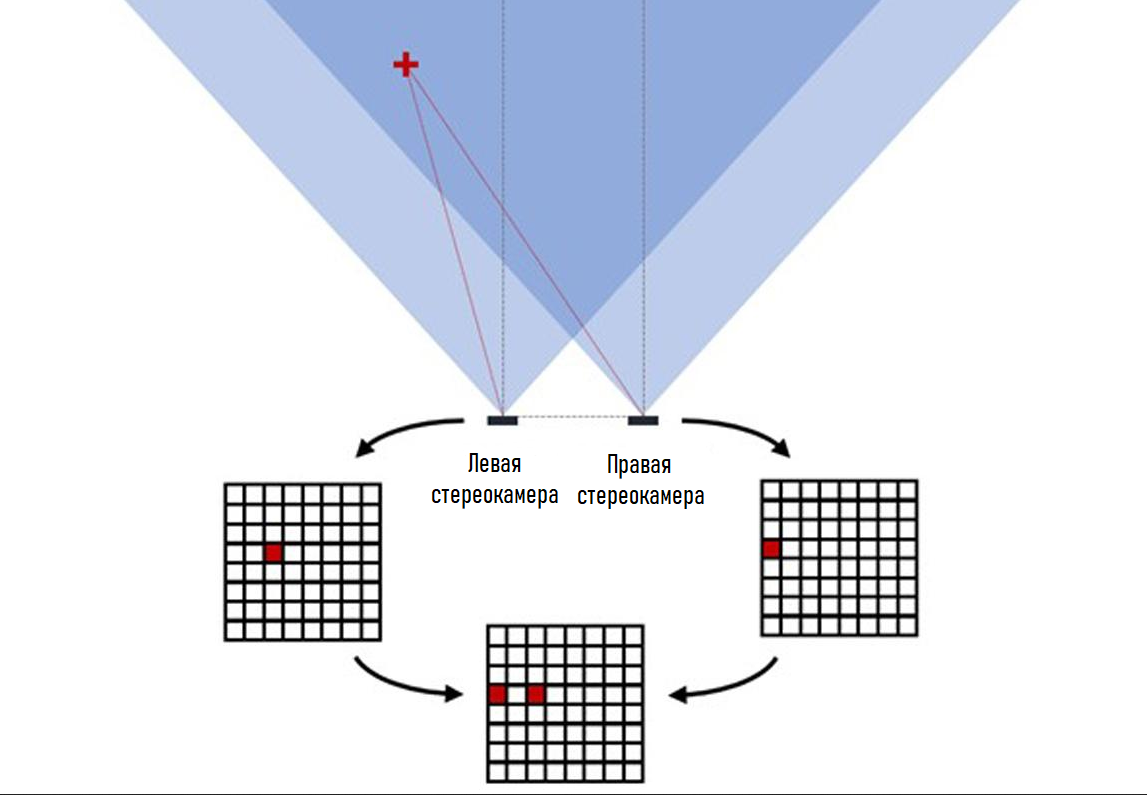 Hình minh họa về nguyên tắc nhìn nổi - điểm 3D màu đỏ nằm ở các vị trí khác nhau trên hình ảnh trái và phải.
Hình minh họa về nguyên tắc nhìn nổi - điểm 3D màu đỏ nằm ở các vị trí khác nhau trên hình ảnh trái và phải.
Kết quả của phép tính có dạng bản đồ độ sâu 176 × 90 pixel, trong đó giá trị của mỗi pixel tương ứng với độ sâu tính bằng mét. Bản đồ độ sâu được làm mới ở 30 Hz.
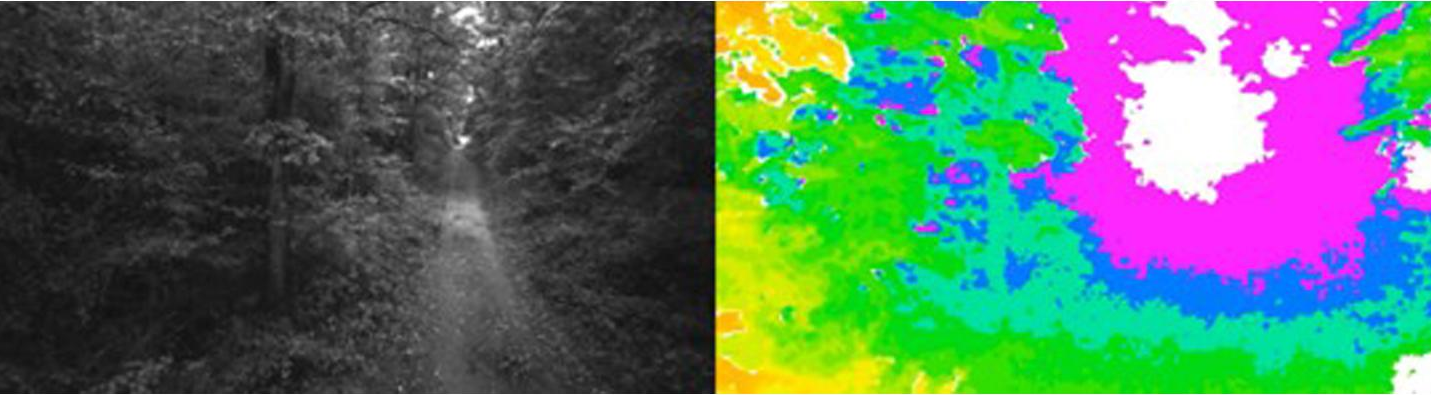
Một ví dụ về hình ảnh được chụp bởi camera bên phải của hệ thống cảm biến ANAFI Ai (bên trái) và độ sâu tương ứng thu được bằng cách sử dụng hình ảnh âm thanh nổi (bên phải). Bản đồ màu đi từ đỏ (Gần hơn) đến tím (Xa hơn) - màu trắng có nghĩa là Ngoài tầm với.
Kết quả tức thì của việc này là độ sâu đo được bằng phương pháp này là không phù hợp, vì sự chênh lệch chỉ có thể nhận các giá trị rời rạc (số pixel). Một điểm 3D nằm đủ xa so với hệ thống cảm nhận và tạo ra sự chênh lệch lý thuyết nhỏ hơn một pixel sẽ được coi là vô hạn, vì sự chênh lệch rời rạc thực tế tương ứng sẽ bằng 0. Độ chính xác của phương pháp so sánh âm thanh nổi giảm khi khoảng cách tăng lên, mặc dù có những phương pháp có thể làm giảm hiện tượng này bằng cách lấy mẫu subpixel.
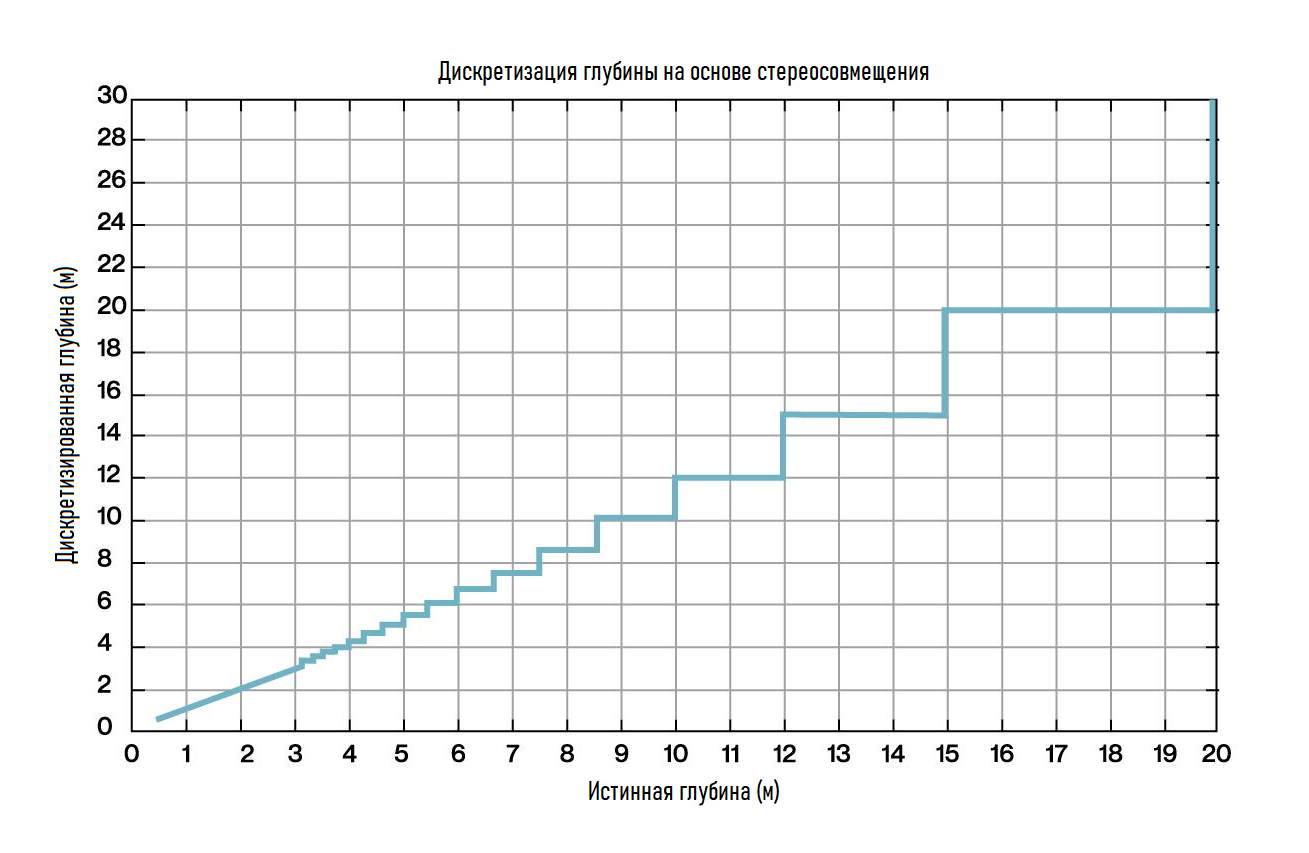 Độ sâu riêng biệt được đo bằng "căn chỉnh âm thanh nổi" so với "độ sâu thực".
Độ sâu riêng biệt được đo bằng "căn chỉnh âm thanh nổi" so với "độ sâu thực".
Ngoài ra, sự chênh lệch phân kỳ khi độ sâu gần bằng không. Vì số lượng pixel trong hình ảnh bị hạn chế nên giá trị chênh lệch cũng bị hạn chế. Kết quả là, có một độ sâu tối thiểu mà hệ thống tri giác bị mù. Độ sâu tối thiểu này là 36 cm đối với ANAFI Ai.
Về hiệu chuẩn: Mỗi cặp camera âm thanh nổi đều được hiệu chuẩn tại nhà máy để đo chính xác sự khác biệt nhỏ có thể tồn tại giữa hai camera và bù đắp cho chúng trong các tính toán độ sâu trên bo mạch.
Người dùng cũng có thể hiệu chỉnh lại một cặp camera âm thanh nổi bằng cách sử dụng mẫu thử nghiệm được cung cấp cùng với máy bay không người lái. Đặc biệt, ở một mức độ nào đó, máy bay không người lái có thể phát hiện ra các lỗi hiệu chuẩn tiềm ẩn có thể phát sinh trong thời gian hoạt động của nó. Trong trường hợp này, phần mềm máy bay sẽ cố gắng điều chỉnh và bù đắp cho chúng, và nếu điều này không thành công, một thông báo sẽ xuất hiện yêu cầu bạn hiệu chỉnh lại.
Độ sâu từ chuyển động
Chuyển động của máy bay không người lái cũng có thể được sử dụng để thu thập hình ảnh của môi trường từ các góc độ khác nhau và do đó tái tạo lại thông tin về độ sâu. Kỹ thuật này được gọi là độ sâu từ chuyển động, hoặc cảm nhận một mắt, bởi vì một camera chuyển động duy nhất là đủ để thu thập thông tin về độ sâu.
Nguyên tắc hoạt động tương tự như thị giác nổi, nhưng thay vì so sánh hình ảnh của môi trường do những người quan sát khác nhau thu được cùng một lúc, tri giác so sánh hình ảnh của môi trường do cùng một người quan sát thu được tại các thời điểm khác nhau. Nếu máy bay không người lái đang di chuyển, thì hình ảnh từ thiết bị quan sát độc đáo này sẽ được chụp từ các góc độ khác nhau. Biết được vị trí mà mỗi khung hình được chụp, có thể chia tam giác các điểm tương ứng với cùng một đối tượng trong các ảnh khác nhau và đưa chúng về dạng 3D.
Đầu ra là một đám mây điểm ba chiều chứa tới 500 điểm cho ANAFI Ai, được tạo ra ở tần số 10 Hz.
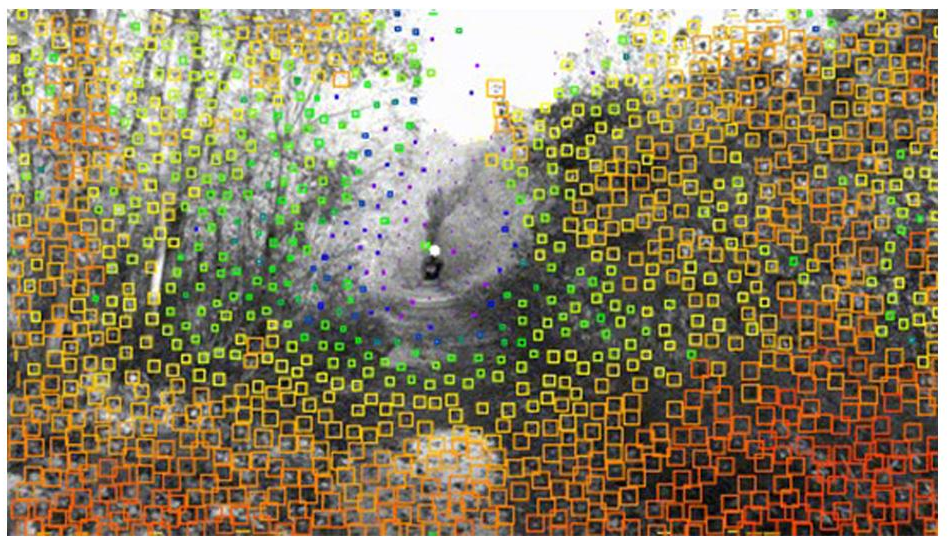 Một ví dụ về đám mây điểm được tạo ra dựa trên độ sâu từ chuyển động - bản đồ màu đi từ đỏ (Gần hơn) sang tím (Xa hơn).
Một ví dụ về đám mây điểm được tạo ra dựa trên độ sâu từ chuyển động - bản đồ màu đi từ đỏ (Gần hơn) sang tím (Xa hơn).
Thuật toán Độ sâu chuyển động ANAFI Ai thường tạo ra ít thông tin hơn (đám mây điểm thưa thớt) so với thuật toán đối sánh âm thanh nổi và yêu cầu máy bay không người lái di chuyển để thu thập thông tin. Ngoài ra, thuật toán này không thể trích xuất thông tin theo hướng chuyển động chính xác (ít nhất là đối với các chương trình phát sóng trực tiếp), vì các đối tượng trong ảnh gần như đứng yên theo hướng này (tiêu điểm mở rộng).
Tuy nhiên, nó có phạm vi phát hiện tốt hơn (về mặt lý thuyết là phạm vi vô hạn) so với kết hợp âm thanh nổi.
Fill Grid
Thông tin về độ sâu từ các thuật toán cảm biến âm thanh nổi và một mắt được tích hợp vào Fill Grid. Lưới này lấy mẫu môi trường 3D thành các hình khối 3D được gọi là voxels. Mỗi voxel được ấn định xác suất bị vật cản chiếm giữ hoặc ngược lại, không bị chướng ngại vật.
Thuật toán truyền tia được sử dụng để tích hợp thông tin độ sâu vào lưới lấp đầy. Đối với mỗi pixel của bản đồ độ sâu thu được do so sánh âm thanh nổi, nó được chuyển đổi thành điểm ba chiều và đối với mỗi điểm của đám mây điểm - thành độ sâu thu được do chuyển động:
- Một tia được vẽ trong lưới lấp đầy từ vị trí của hệ thống tri giác đến vị trí của điểm 3D.
- Xác suất của một voxel chứa một điểm 3D bị chiếm dụng được tăng lên.
- Xác suất mà tất cả các voxel vượt qua bởi một tia khác với tia chứa điểm 3D đều bị giảm.
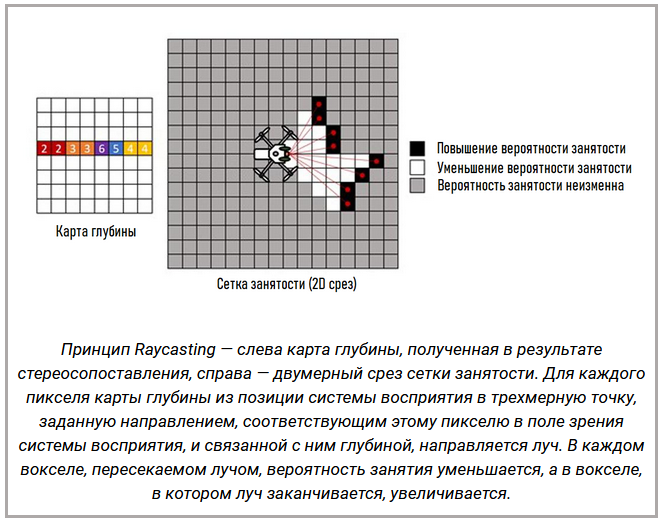
Do đó, lưới hoạt động như một bộ lọc thời gian cho thông tin độ sâu, hấp thụ bất kỳ tiếng ồn tiềm ẩn nào trong phép đo độ sâu và như một bộ nhớ của các phép đo trước đó, cho phép bạn có thể điều hướng các môi trường khó khăn ngay cả khi không có trường nhìn 360 ° liên tục của hệ thống nhận thức.
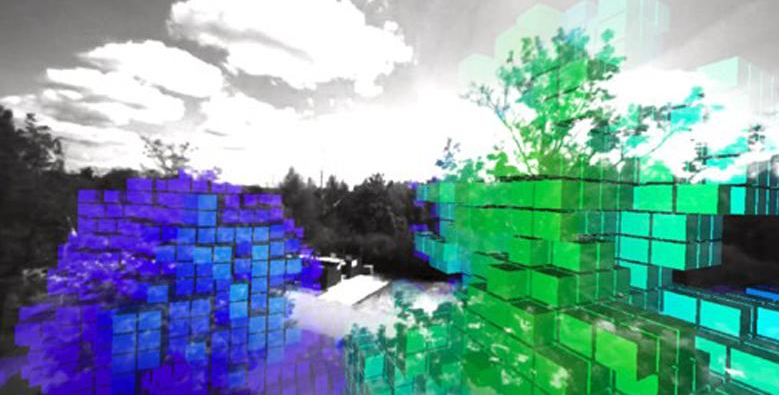 Một ví dụ về lưới tô màu. Voxels được xếp chồng lên chế độ xem camera âm thanh nổi bên phải với mức độ chắc chắn cao rằng chúng đang bận, từ màu đỏ (Gần) đến màu tím (Xa).
Một ví dụ về lưới tô màu. Voxels được xếp chồng lên chế độ xem camera âm thanh nổi bên phải với mức độ chắc chắn cao rằng chúng đang bận, từ màu đỏ (Gần) đến màu tím (Xa).
Lưới chèn là cơ sở cho các thuật toán lập kế hoạch chuyển động được ANAFI Ai sử dụng cho chuyến bay tự động và tránh chướng ngại vật.
Tránh chướng ngại vật
Nhờ kiến thức về môi trường 3D của máy bay không người lái được lưu trữ trong lưới chèn, ANAFI Ai có thể tránh chướng ngại vật. Điều này cung cấp sự an toàn bổ sung đáng kể cho các nhiệm vụ tự hành, nhưng cũng hữu ích cho các chuyến bay thủ công, đặc biệt nếu đường ngắm giữa phi công và máy bay không người lái bị suy giảm.
Cứ 30 mili giây ANAFI Ai dự đoán khoảng thời gian ngắn danh nghĩa sẽ như thế nào trong tương lai. Dự đoán này được suy ra từ các liên kết do người dùng gửi, cho dù chúng là lệnh bay từ điều khiển từ xa, điểm tham chiếu để đính kèm với kế hoạch bay hay quỹ đạo đầu vào. Sau đó, bằng cách sử dụng mô hình máy bay không người lái bên trong được mô phỏng, thuật toán lên lịch trình tính toán các hiệu chỉnh nhỏ nhất có thể đối với quỹ đạo danh nghĩa được dự đoán này để làm cho máy bay không người lái không bị va chạm và khả thi.
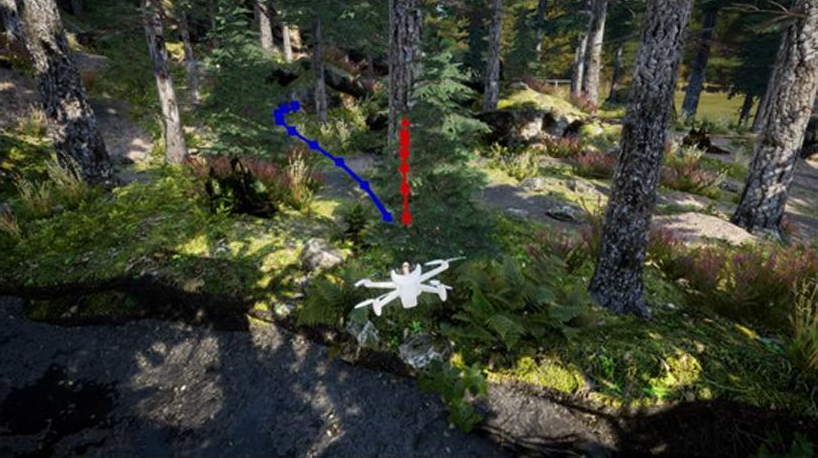 Một ví dụ về quỹ đạo hiệu chỉnh được tính toán bởi thuật toán tránh chướng ngại vật để phản ứng với sự va chạm của quỹ đạo tham chiếu với một cái cây.
Một ví dụ về quỹ đạo hiệu chỉnh được tính toán bởi thuật toán tránh chướng ngại vật để phản ứng với sự va chạm của quỹ đạo tham chiếu với một cái cây.
Hệ thống tránh chướng ngại vật ANAFI Ai đã được thiết kế để hoạt động ở tốc độ lên đến:
- Bay ngang: 29 km / h
- Leo lên: 14 km / h
- Hạ xuống: 11 km / h
Khả năng tránh bị hạn chế khi mưa hoặc gió mạnh, ánh sáng yếu hoặc điều hướng vệ tinh bị gián đoạn. Ngoài ra, trước khi bay, bạn phải đảm bảo rằng các thấu kính của hệ thống cảm biến sạch sẽ.
Nhiệm vụ bay

Tính năng chính
Hàng không SDK (xem. Phần SDK) cho phép các nhà phát triển truy cập vào mọi cảm biến bay không người lái, máy ảnh, giao diện kết nối và chức năng độc lập. Do đó, họ có thể tùy chỉnh hành vi của máy bay không người lái để tạo ra các nhiệm vụ bay. Mỗi nhiệm vụ bay chứa một tập hợp các hành vi hoặc chế độ cơ bản:
- Trên mặt đất: Hành vi khi động cơ dừng, ví dụ như hiệu chuẩn cảm biến.
- Cất cánh: nhiều chiến lược cất cánh khác nhau
- Di chuột: giữ một điểm cố định
- Chuyến bay: sách hướng dẫn chức năng và chuyến bay tự hành
- Hạ cánh: các chiến lược hạ cánh khác nhau
- Quan trọng: khi phát hiện trạng thái quan trọng
Các nhiệm vụ bay tùy chỉnh có thể tạo ra các hành vi mới hoặc sử dụng lại chúng từ nhiệm vụ mặc định.
Giá cả và tính khả dụng
Thời gian bắt đầu bán máy bay không người lái ANAFI Ai được lên kế hoạch vào tháng 9 năm 2021. Thông tin về giá bán vẫn chưa được tiết lộ ở thời điểm hiện tại. Chúng tôi tiếp tục theo dõi các thông tin đến và chắc chắn sẽ cập nhật phần này vào một ngày sau đó.

Tải xuống tài liệu
Tài liệu dành cho nhà phát triển:
- Tải xuống tài liệu kỹ thuật đầy đủ từ nhà phát triển
- Tải xuống thông số kỹ thuật sản phẩm từ nhà phát triển
Video
Đánh giá hàng đầu ANAFI Ai từ nhà phát triển và người dùng
Mở gói và chuyến bay đầu tiên.
Chuyến bay thử nghiệm của máy bay không người lái trong phạm vi có kết nối 4G. Tổng thời gian bay là 29 phút với tốc độ bay ngang trung bình là 58 km / h (16 m / s). Trong thời gian này, máy bay không người lái đã có thể bay được 27 km. Bạn cũng có thể nhận thấy rằng chuyến bay được thực hiện trong điều kiện gió mạnh, liên tục được cảnh báo bởi hệ thống máy bay không người lái.
.






