
- 1 Introducción
- 2 El desarrollador sobre la máquina
- 3 Características
- 4 Paquete contenido
- 5 Especificación
- 5.1 Drone
- 5.2 Comunicación
- 5.3 Sistema de navegación
- 5.4 Skycontroller 4
- 5.5 Batería inteligente de la aeronave
- 5.6 Aplicación
- 5.7 Cámara
- 5.8 Modos de vuelo autónomos
- 5.9 Ciberseguridad
- 5.10 Parrot SDK
- 6 Apariencia
- 7 Comunicación
- 7,1 4G
- 7,2 Máx. alcance con conexión 4G
- 7.3 Wi-Fi
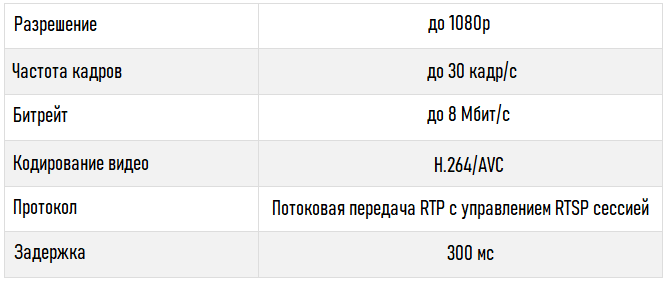
- 7.4 Video en vivo
- 8 Cámara
- 8.1 Matriz de 48MP
- 8.2 Lente
- 8.3 Modos de video
- 8.4 Codificación de video
- 8.5 HDR
- 8.6 Modos de foto
- 9 Estabilización híbrida
- 9.1 Gimbal de la cámara principal
- 10 Fotogrametría
- 10.1 Inspección y cartografía
- 10.2 Capacidades de IA y 4G
- 10.3 Vuelo autónomo
- 11 Fotogrametría o LIDAR
- 11.1 Pros de fotogrametría
- 11.2 Contras de LIDAR
- 12 SDK
- 12.1 Air SDK
- 12.2 Ground SDK
- 12.3 OpenFlight
- 12.4 Sphinx
- 12,5 Olympe
- 12.6 PdrAW
- 12.7 Modelos C. A. D.
- 12,8 Compatibilidad con MAVLink y GUTMA
- 13 El mayor ecosistema asociado para los drones Parrot
- 13.1 Parrot para cualquier necesidad comercial
- 14 Ciberseguridad
- 14.1 Privacidad de datos
- 14.2 Cumple con FIPS140 -2 y certificado por CC EAL5 Secure Element
- 14.3 Conexión segura 4G y autenticación sólida
- 14.4 Inicialización segura y actualización
- 14.5 Configuración de claves de usuario en el elemento seguro
- 14.6 Fotos firmadas digitalmente
- 14.7 Transparencia y control de seguridad continuo con recompensa de errores
- 15 Gestión de datos
- 15.1 Datos recopilados
- 15.2 Uso final de los datos recopilados [1 26]
- 15.3 Mejora de la inteligencia artificial (IA)
- 16 Características de vuelo
- 16.1 Características aerodinámicas
- 16.2 Actuadores y aerodinámica
- 16.3 Sensores
- 16.4 Características del sensor
- 16.5 Piloto automático
- 17 Vuelo autónomo
- 17.1 Características principales
- 17.2 Estrategia del sistema de percepción
- 17.3 Sensores
- 17.4 Doble suspensión
- 17.5 Reconstrucción del medio ambiente
- 18 misiones de vuelo
- 18.1 Características principales
- 19 Precio y disponibilidad
- 20 Descargar documentación
- 21 Videos
Introducción [16 4]
Parrot Anafi Ai es una solución única completamente nueva de un conocido desarrollador francésuso comercial
La tarjeta de llamada de Anafi Ai es el módulo 4G integrado, gracias al cual el dron pudo utilizar la cuarta generación de comunicaciones móviles como canal principal de transmisión de datos entre el dron y el equipo de control, que de hecho elimina todas las restricciones en el rango de vuelo y predetermina el funcionamiento del UAV fuera de la línea de visión. De cara al futuro, notamos que el potencial declarado de la máquina resultó ser increíblemente poderoso y más que nunca corresponde a su apariencia futurista, que se inspiró en la naturaleza para crear ingenieros franceses.
El desarrollador sobre el automóvil
Martin Liné, director de marketing de Parrot, los drones Parrot

Características
Características principales de Parrot Anafi Ai:
- Peso 898 gramos
- Tiempo para volar 60 segundos
- Diseño plegable portátil único
- Módulo de comunicación 4G integrado para una interacción completa del dron / equipo de control sin restricciones en todas las condiciones ambientales
- Compatible con LTE en todo el mundo
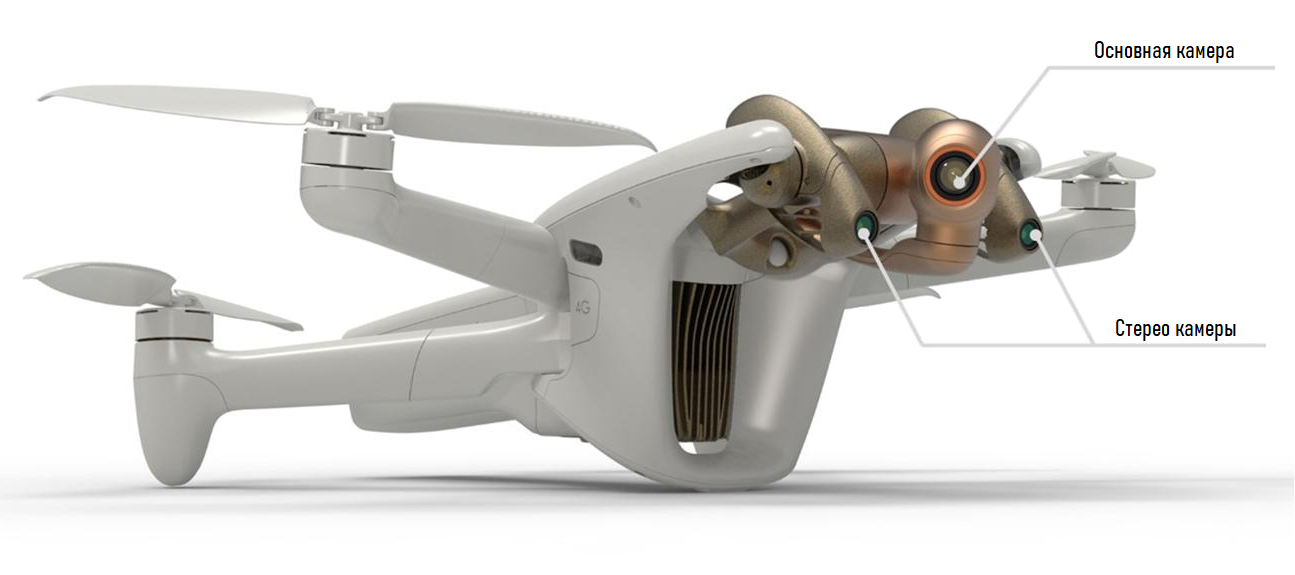
- Equipado con sistema de transmisión de señal omnidireccional (4 antenas direccionales con reflector (con ganancia: antenas de 2,5 dBi / s). El dron determina el mejor par de antenas en función de su orientación y posición relativa a la posición del piloto)
- Equipado con un sistema de imágenes omnidireccional único del mundo circundante construido sobre un par de cámaras estereoscópicas montadas en un cardán especializado con un rango de giro de 330 grados (de -120 ° a 210 °), trabajando en conjunto con un sistema de optimización inteligente. rutas de vuelo
- Adaptado para vuelos en interiores
- Transmisión de video en vivo en 1080p con baja latencia (300 m / s) sin restricciones de alcance en cualquier parte del mundo, con tasa de bits de video de 12 Mbps
- Capacidad para transferir archivos al almacenamiento en la nube directamente en vuelo
- Módulo de comunicación Wi-Fi incorporado (Wi-Fi 802.11a / b / g / n) para un control completo de la interacción del equipo / drone (como una opción de conexión alternativa)
- Esclavo. Rango de frecuencia de Wi-Fi: 2,4 GHz / 5,8 GHz
- Máx. rango de vuelo FPV a través de Wi-Fi: 9 km
- Modo automático único de operación de módulos 4G / Wi-Fi, que permite, según la congestión de la red, cambiar sin problemas de una tecnología de comunicación a otra sin pérdida de datos
- Clase de protección dron IPX3
- Máx. tiempo de vuelo 32 min
- Máx. velocidad de vuelo horizontal 61 km / h
- Máx. resistencia al viento: 13 m / s
- Máx.techo sobre el nivel del mar 5000 m
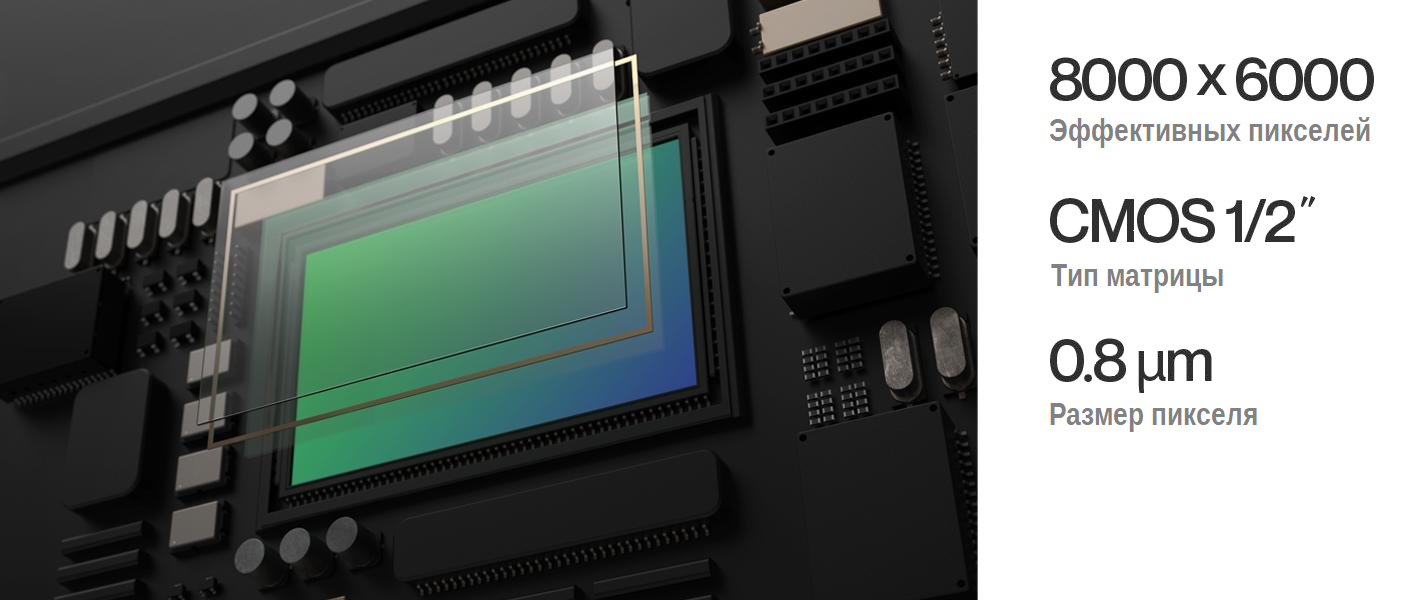
- Cámara 4K de 48MP construida en matriz CMOS de 1/2 pulgada con un tamaño de píxel de 0.8 μm; con matriz de filtros de color Bayer incorporada
- Lente óptica LD-ASPH
- Sistema de estabilización de imagen híbrido de 6 ejes (EIS digital mecánico de 3 ejes de 3 ejes)
- Controlable rango de funcionamiento Gimbal -90 ° a 90 °
- Zoom digital sin pérdida 6x (2x 4K / 4x FHD)
- Máx. velocidad de bits de video 200 Mbps
- Formatos de grabación de video HDR8 / HDR10
- Máx. rango dinámico 14EV
- Perfil de color P-log para posprocesamiento
- 5 modos automáticos de vuelo y disparo (Fotogrametría / Plan de vuelo / Camarógrafo / Smart RTH / Vehículo)
- Ranuras integradas para tarjetas MicroSD y SIM
- Compatible con PIX4D Suite
- Los modos de vuelo fotogramétricos están disponibles en mob. Aplicación FreeFlight 7 y software OpenFlight
- Creación de plan de vuelo con un clic
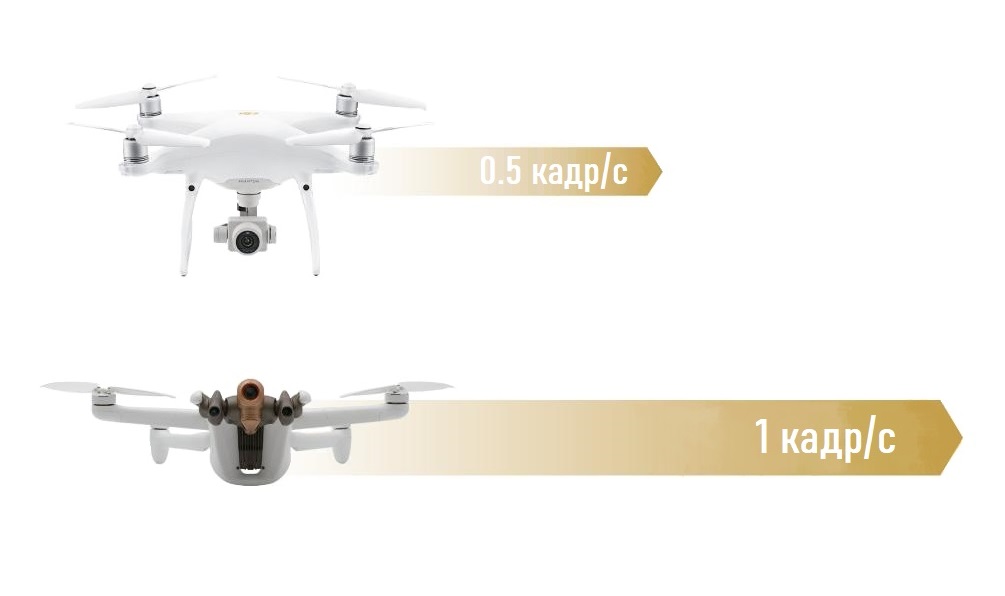
- Fotogrametría de 48MP 1 fps: dos veces más rápido que la competencia
- Precisión de disparo: 0,46 cm / pix. GSD a 30 m
- Compatibilidad con Parrot SDK (con la capacidad de incrustar su código en el dron usando el Air SDK, crear aplicaciones móviles usando Ground SDK, configurar una estación terrestre de código abierto usando OpenFlight, interactuar con el moderno Sphinx herramienta de simulación de drones, así como secuencias de comandos de Python con Olympe y procesamiento de video y metadatos con PdrAW)
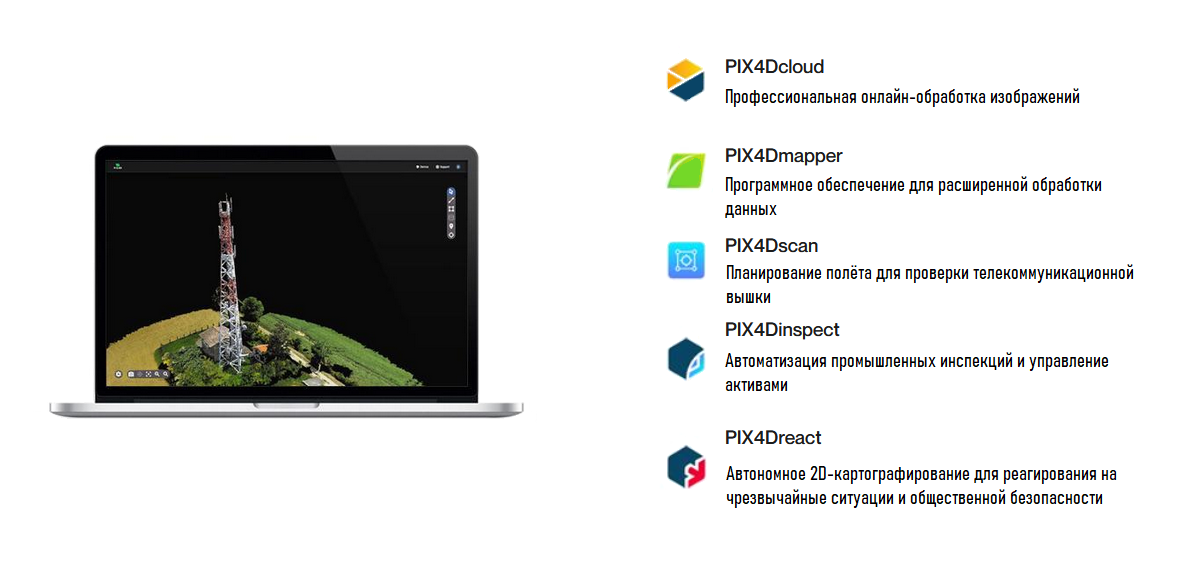
- Compatible con software de terceros: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai cumple con General Regulaciones Regulación de protección de datos de la Unión Europea (GDPR)
- Privacidad superior de datos con NIST FIPS140-2 Nivel 3 WISeKey Secure Element integrado con certificación Common Criteria EAL5
- Video y controles protegidos con SRTP / DTLS según webRTC
- Nuevo equipo de control portátil Parrot Skyco ntroller 4
- Nueva aplicación móvil Parrot FreeFlight 7

Paquete
El desarrollador ofrece el dron en una única configuración, que incluirá:
- Drone ANAFI Ai
- Maleta de transporte rígida
- Equipo de control Parrot Skycontroller 4
- 1 × Smart batería
- Cargador USB-PD
- Kit de hélice de repuesto (2CW / 2CCW)
- Cable complementario (USB-C a Lightning)
- 2 × cables complementarios (USB -C a USB-C)
- Tabla de calibración

Especificación
Aeronave

Comunicación
Sistema de navegación
Skycontroller 4

Batería inteligente para aeronaves
Aplicación

Cámara

Modos de vuelo autónomos
Ciberseguridad
Parrot SDK
A continuación, Puede familiarizarse con la información clave del Parrot Anafi Ai, que le permitirá conocer con más detalle el potencial declarado de la máquina, así como qué mejoras se han implementado en comparación con la versión comercial del dron . Parrot Anfi Thermal y otros drones de primeras marcas.
Apariencia





Comunicación
4G
ANAFI Ai incluye módulo de radio 4G (además de el módulo de radio Wi-Fi), que le permite transmitir un flujo de video en calidad 1080p con una tasa de bits máxima de 12 Mbps, con una latencia muy baja (300 ms), sin limitación en el alcance y en cualquier parte del mundo.
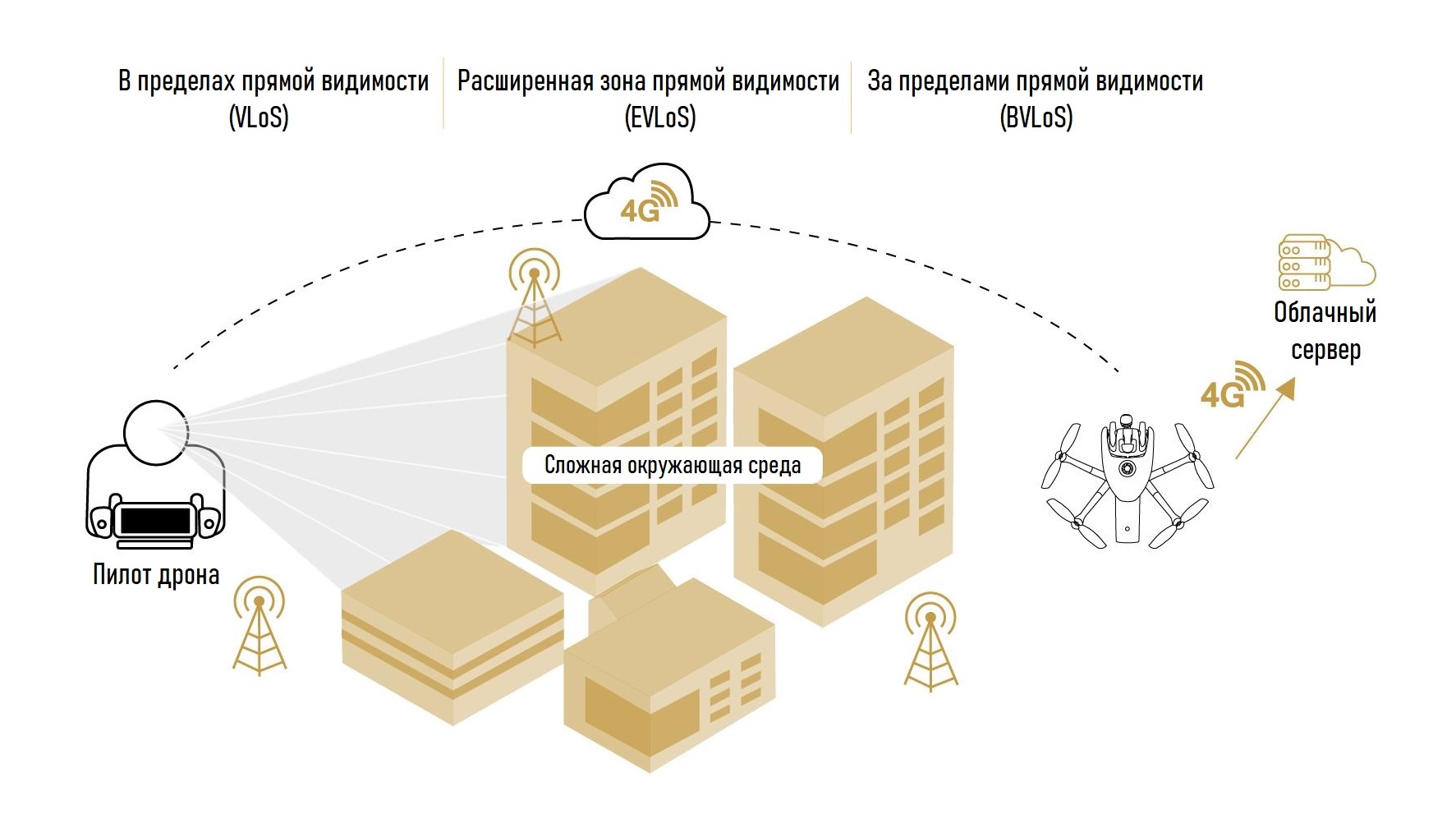
Compatibilidad
El módulo ANAFI Ai 4G admite más de 28 bandas de frecuencia, que cubren más del 98% de las frecuencias implementadas en todo el mundo.
Cambio automático de red
La calidad y el ancho de banda de las redes 4G y Wi-Fi se miden cada 100 ms para adaptar la transmisión a las condiciones de la red. Combinado con algoritmos de enrutamiento, la conexión entre el dron y su controlador se mantiene incluso cuando la conexión Wi-Fi se ve gravemente interrumpida. Por lo tanto, cuando el ancho de banda efectivo (ancho de banda utilizable) de Wi-Fi es inferior a 1,5 Mbps, el sistema cambiará automáticamente a 4G.
Para limitar el consumo de datos móviles cuando el piloto está dentro del alcance de la red Wi-Fi del dron, la transición de 4G a Wi-Fi también se realiza automáticamente sin cortar la transmisión de video.
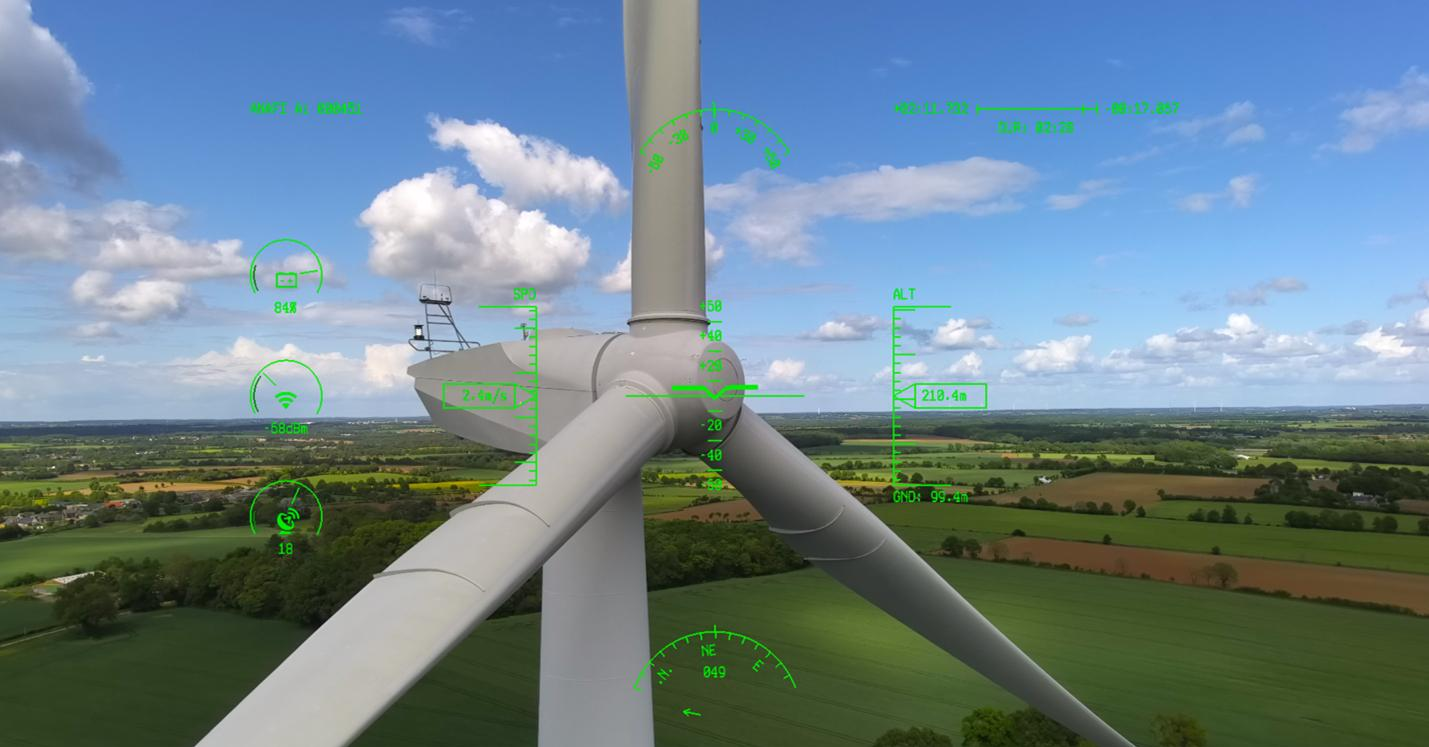
Máx. rango con conexión 4G
El video del desarrollador muestra el máx. rango de vuelo de Anafi Ai con conexión 4G en una dirección con una carga de batería. El tiempo total de vuelo fue de 29 minutos a una velocidad de vuelo horizontal promedio de 58 km / h (16 m / s). Durante este tiempo, el dron pudo cubrir 27 km. También se puede notar que el vuelo se realizó en condiciones de fuerte viento, lo cual fue constantemente advertido por el sistema de drones.
Algoritmos de optimización de flujo de video implementados
Control de congestión 4G
El algoritmo de control de congestión permite:
- Medir la pérdida de paquetes durante todo el ciclo de la red.
- Mida el retardo (tiempo de ida y vuelta).
- Ajuste el ancho de banda de acuerdo con estos dos parámetros.
El objetivo final del algoritmo es maximizar el ancho de banda disponible mientras se mantiene la latencia más baja posible. Este algoritmo se implementa en cada una de las interfaces disponibles en el dron, cada una con sus propios parámetros, optimizados según la red. Basado en la información proporcionada por este algoritmo, el administrador de enlaces toma decisiones de enrutamiento e interfaz activa.
Control del dron a través de una conexión 4G
ANAFI Ai se conecta al control remoto a través de 4G en menos de 30 segundos si el dron está fuera del alcance de Wi-Fi y en menos de 15 segundos si el dron está dentro del rango de Wi-Fi. Y también la conexión 4G proporciona:
- Detección e inicio de una conexión basada en el protocolo VOIP SIP.
- Utilice un servidor de retransmisión para establecer conexiones a través de redes seguras.
Rendimiento del flujo de video
- Latencia: 300 ms.
- Seguridad: el video y los controles están protegidos con SRTP / DTLS según webRTC.
- Antenas: 28 bandas LTE de 700 MHz a 2,6 GHz.

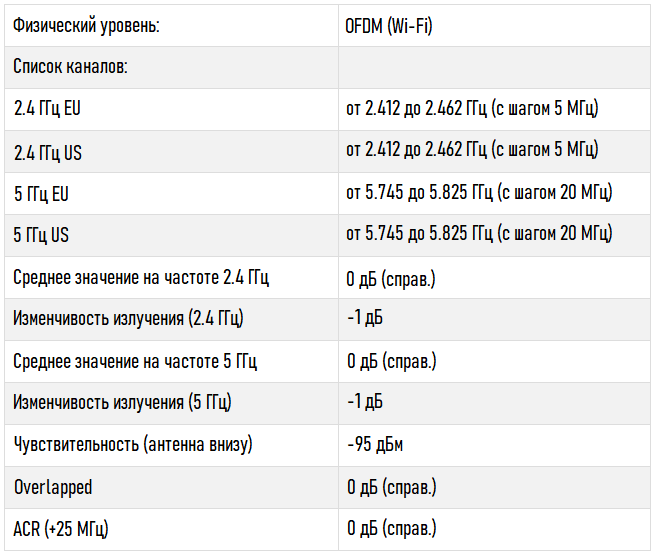
Wi-Fi
Sistema de transmisión omnidireccional
- ANAFI Ai ha 4 antenas reflectoras direccionales (con ganancia de antena: 2,5 dBi / s). El dron determina el mejor par de antenas en función de su orientación y posición en relación con la posición del piloto.
- Con una ganancia recombinada de 3,5 / - 1,5 dBi en el plano horizontal del dron, la ganancia de RF de ANAFI Ai es muy uniforme.
- La radiación de la antena aguas abajo se ha mejorado en 4 dB con respecto a ANAFI.
Diseño externo de la radio de alta potencia
El frente de la radio maximiza la potencia en la base de la antena con muy buena linealidad y sensibilidad (-94 dBm a 6,5 Mbps) para alcanzar la potencia límite máxima de la FCC.

Fiabilidad Wi-Fi
Parámetros 802.11
ancho de banda bajo, latencia baja, variabilidad del nivel de recepción debido a la velocidad del dron, largo alcance, presencia de interferencias. Estos parámetros incluyen agregación, reintentos, tecnología MiMo (STBC), velocidad de datos de cuadros de control y condiciones de desconexión.
Prevención inteligente de interferencias
ANAFI Ai tiene un algoritmo para la eliminación de canales (2,4 GHz y 5 GHz de doble banda) en caso de interferencia.
Adaptación y monitoreo de flujo
ANAFI Ai monitorea continuamente el estado de su enlace de 4 Hz y puede detectar interferencias. Esto le permite optimizar dinámicamente el ancho de banda y el tamaño de los paquetes transmitidos. También alerta al piloto si se encuentra en un entorno particularmente congestionado o si está a punto de perder la señal.
Reducción del ancho de banda
En el límite de su rango y si las condiciones lo permiten, ANAFI Ai puede cambiar a un ancho de banda de 10 MHz para mejorar su sensibilidad en 3 dB y aumentar el rango en un 40%.

Indicadores de radio
Transmisión de video
Indicadores de enlace de video
Algoritmos de optimización de flujo de video implementados
Parrot Gen4 Streaming (cuarta generación)
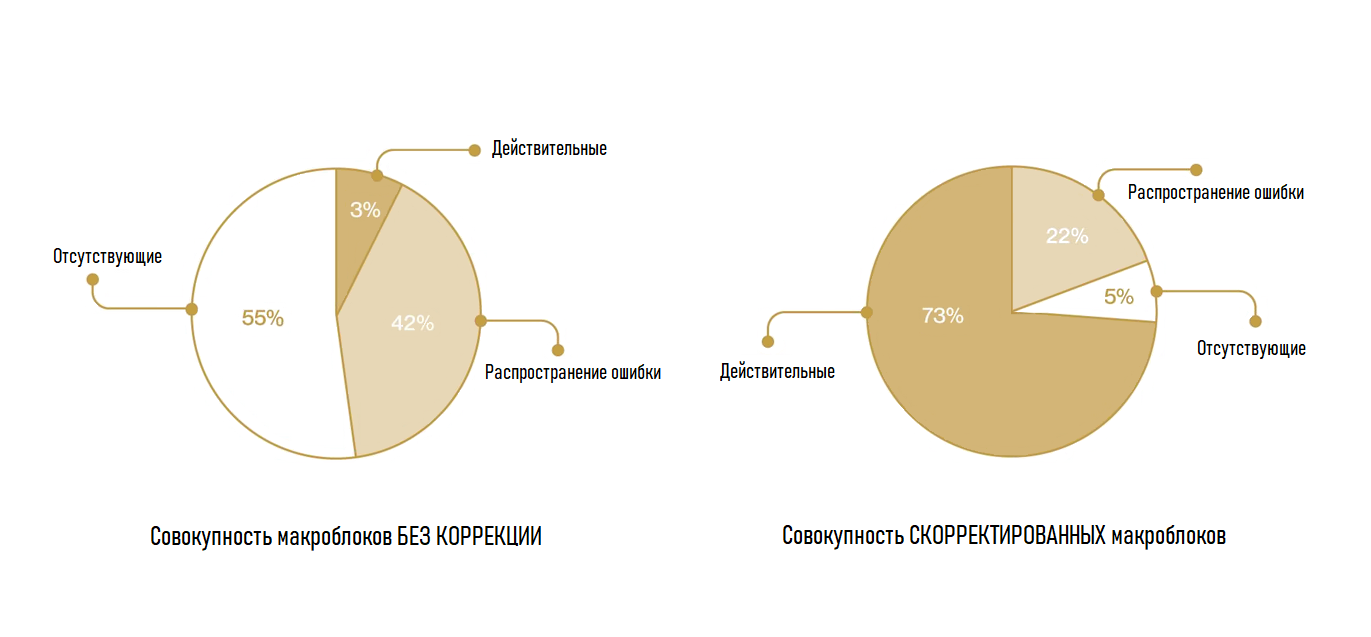
Este algoritmo reduce el impacto visual de las pérdidas de red y proporciona interoperabilidad todos los decodificadores, al tiempo que proporcionan un flujo sintácticamente completo: las partes faltantes de la imagen se reconstruyen como partes faltantes, idénticas a las de la imagen de referencia.
Por lo tanto, las fallas están contenidas en aquellas áreas que son propensas a la pérdida y no se aplican a toda la imagen.
Los gráficos siguientes muestran la tasa de éxito de la decodificación de macrobloques con una pérdida de red del 5%, con y sin funciones de transmisión avanzada ANAFI Ai. El algoritmo asegura la correcta decodificación del 75% de los macrobloques. Permiten al usuario continuar su misión sin congelar la pantalla o perder la transmisión.
Control de congestión
El algoritmo también evalúa el entorno de radio y Wi-Fi para anticipar y evitar la pérdida de paquetes y la congestión de la red, lo que ayuda a reducir la latencia. El algoritmo se basa en una estimación de la capacidad del canal, calculada sobre la base de la tasa de datos y la tasa de error en la capa física; luego afecta a los parámetros de codificación y encapsulación de la red.
Metadatos
Los metadatos se transmiten con el flujo de video. En particular, contienen elementos de telemetría de drones (posición, altitud, velocidad, nivel de batería, etc.) y métricas de video (ángulo de cámara, valor de exposición, campo de visión, etc.).
La sincronización de imágenes y metadatos abiertos realiza las funciones de posicionamiento preciso en el mapa, seguimiento de instrumentos de vuelo en el HUD o habilitación de elementos de realidad aumentada.
Los metadatos se incluyen utilizando métodos estándar (extensión de encabezado RTP); el formato de datos definido por Parrot es de código abierto: está disponible en ANAFI Ai SDK.
Cámara

Sensor de 48MP
La matriz ANAFI Ai incluye una gran cantidad de megapíxeles para fotografías aéreas detalladas.
Emplea la tecnología de matriz de filtros de color de Quad Bayer, donde grupos de 4 píxeles adyacentes tienen el mismo color. Por lo tanto, la captura HDR en tiempo real se puede obtener en los modos de foto y video agregando señales de cuatro píxeles adyacentes.
Su rango dinámico es 4 veces mayor que el de las matrices estándar de Bayer. Incluso las escenas complejas se pueden filmar con un mínimo de resaltado o pérdida de detalles en las sombras.
Lente
La lente ANAFI Ai se ha desarrollado especialmente para Parrot. Combina 6 elementos asféricos y está optimizado para reducir el destello óptico. Esta lente ofrece 68 ° HFoV en modo de video estándar y 64.6 ° HFoV en modo de fotografía estándar.

Modos de video
ANAFI Ai captura video 4K fluido a 60 cuadros por segundo, incluido P-Log y también HDR10 4K vídeo de hasta 30 fps. La siguiente tabla enumera todos los modos de video ANAFI Ai.

Codificación de video
Los usuarios pueden elegir entre H.264 (AVC) y H.265 (HEVC).
Todas las resoluciones utilizan los siguientes formatos de píxeles:
- YUV420p (espacio de color BT.709 de 8 bpc) para el modo estándar y HDR8.
- YUVJ420p (8 bits / componente, rango completo - espacio de color BT.709) para estilo P-log.
- YUV420p10 (espacio de color 10bpc BT.2020) para grabación HDR10, solo H.265.
HDR
Al grabar video en HDR8 y HDR10, ANAFI Ai cubre un rango dinámico de 14EV. El formato HDR10 ofrece un brillo máximo de 1000 nits y una profundidad de color de 10 bits. Proporciona una gama de mil millones de colores frente a los 16 millones del rango dinámico estándar. En comparación con HDR8, HDR10 produce imágenes más del doble de brillantes con el correspondiente aumento de contraste. HDR8 se puede mostrar en cualquier pantalla estándar, mientras que HDR10 es para televisores y pantallas HDR10.
Modos de fotografía
Descripción de los modos
La sección Control de modo contiene ajustes que afectan el número de disparos que se toman cada vez que se abre el obturador.
Modo de captura única
Modo de captura única estándar. Después de cada disparo del obturador, el sistema procesa inmediatamente la imagen capturada.
Modo de horquillado
Los usuarios pueden disparar una serie de 3, 5 o 7 fotogramas con diferentes exposiciones para cada fotograma. Están disponibles los siguientes ajustes preestablecidos:
- [-1 EV, 0, 1 EV] (ajuste predeterminado)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

Modo de ráfaga
El modo de ráfaga permitirá al usuario tomar una ráfaga de 10 cuadros en 1 segundo.
Modo panorámico
El modo panorámico incluye cuatro tomas panorámicas diferentes:
- Esférico (360 °) es un modo panorámico que incluye tres opciones para fotografiar un panorama esférico: Esfera / Pequeño Planeta / Túnel.
- Horizontal (180 °)
- Vertical (109 °)
- Superancho - nuevo super modo de unión panorámica de 9 imágenes (HFOV 110 °, panorámica recta)
Para obtener más información sobre las especificaciones del modo panorámico, consulte la siguiente tabla:

Modo de lapso de tiempo
Este modo le permite tomar fotografías en los siguientes intervalos de tiempo fijos:
- 48MP: 1, 2, 4, 10, 30 o 60 segundos.
- 12MP: 0,5, 1, 2, 4, 10, 30 o 60 seg.
Modo de secuencia de GPS
Este modo de fotografía fue desarrollado para inspección y fotogrametría. Le permite tomar fotografías en los siguientes intervalos de distancia fijos: 5, 10, 20, 50, 100 o 200 metros.
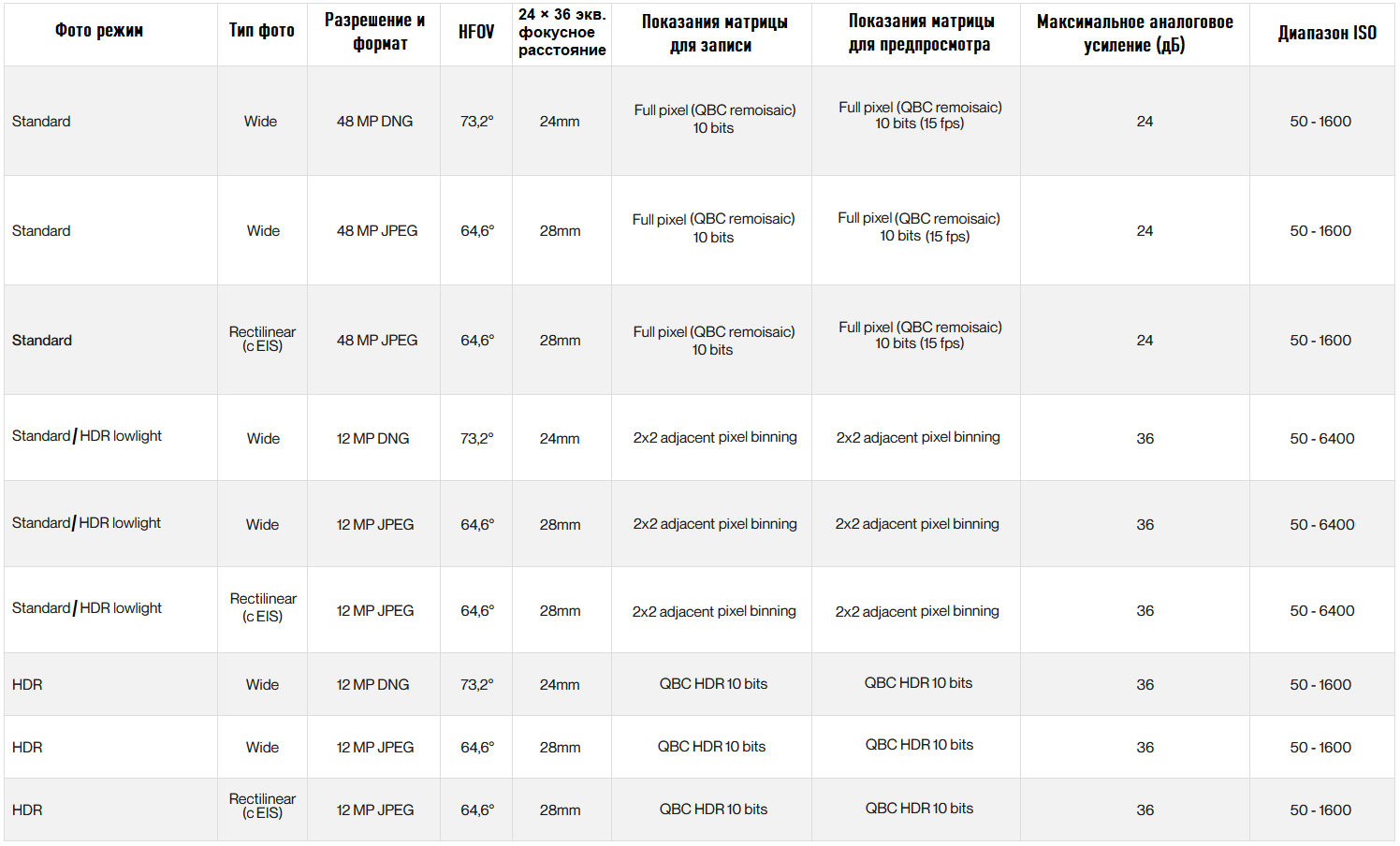
La siguiente tabla muestra los modos y resoluciones de captura de imágenes fijas, incluido el modo de lectura del sensor:
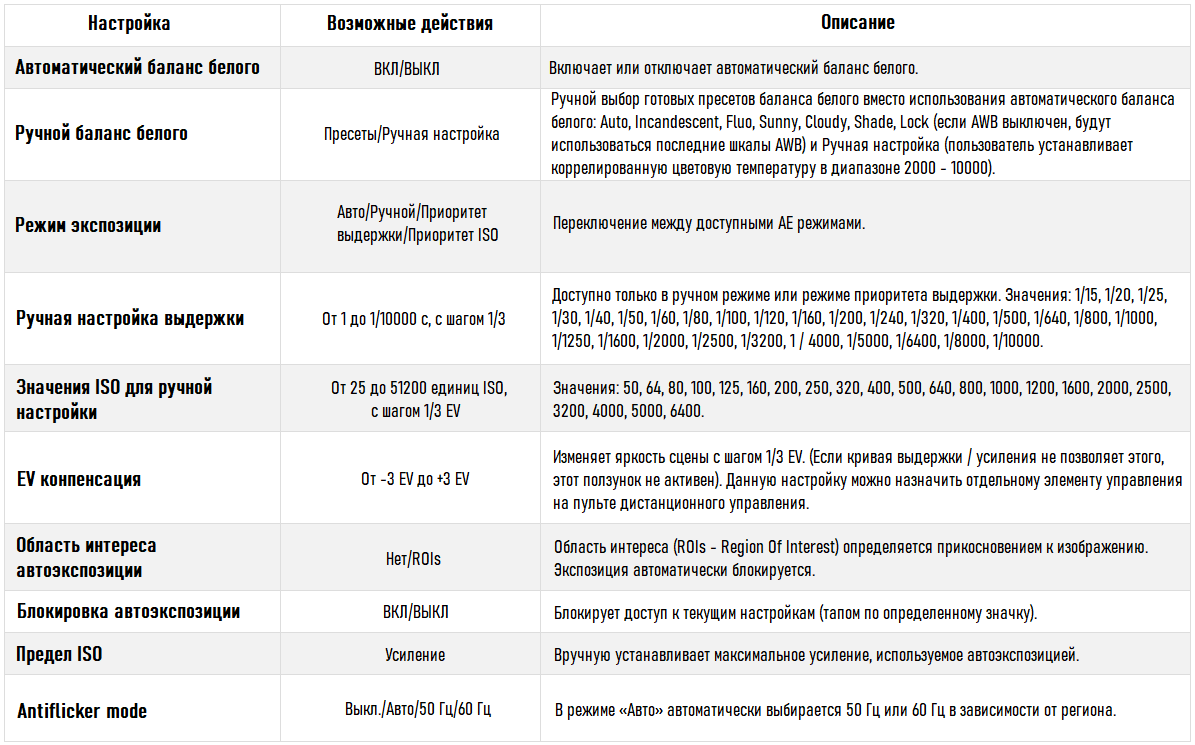
Configuración
En el siguiente La tabla enumera las configuraciones disponibles para cada modo.
Zoom 6x
El zoom está disponible en todos los modos de foto y video. Combinados con un sensor de 48 megapíxeles, los algoritmos de nitidez precisos producen imágenes de alta definición incluso cuando se usa un zoom digital de 6x. Los usuarios de ANAFI Ai ahora pueden ver un detalle de 1 cm desde 75 m de distancia. El alto número de píxeles también permite recortar el video 4K a 1080p sin pérdida de calidad.

Estabilización híbrida
El ANAFI Ai tiene la estabilización más precisa en el mercado de micro UAV.
Combina estabilización combinada:
- Mecánica de 3 ejes (Mecánica de 3 ejes. Gimbal)
- Electrónico de 3 ejes (EIS)
La estabilización mecánica estabiliza el eje de puntería de la cámara independientemente de la posición de vuelo del dron. La estabilización de imagen electrónica corrige los efectos de micro-vibración para frecuencias superiores a 100 Hz, que el accionamiento mecánico no puede manejar.
Gimbal de la cámara principal
La estabilización mecánica le permite estabilizar y orientar el eje horizontal de la vista de la cámara en los 3 ejes.
 Mecanismo de giro de 3 ejes. suspensión de la cámara principal ANAFI Ai.
Mecanismo de giro de 3 ejes. suspensión de la cámara principal ANAFI Ai.
Características principales
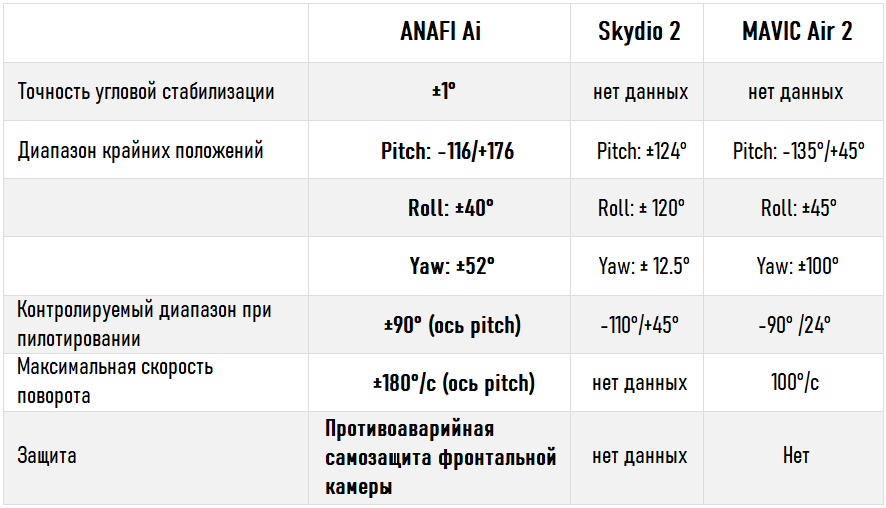
- Gimbal mecánico de 3 ejes para cámara principal
- Desplazamiento vertical 292 °, campo de visión -116 ° a 176 °
Rendimiento del cardán
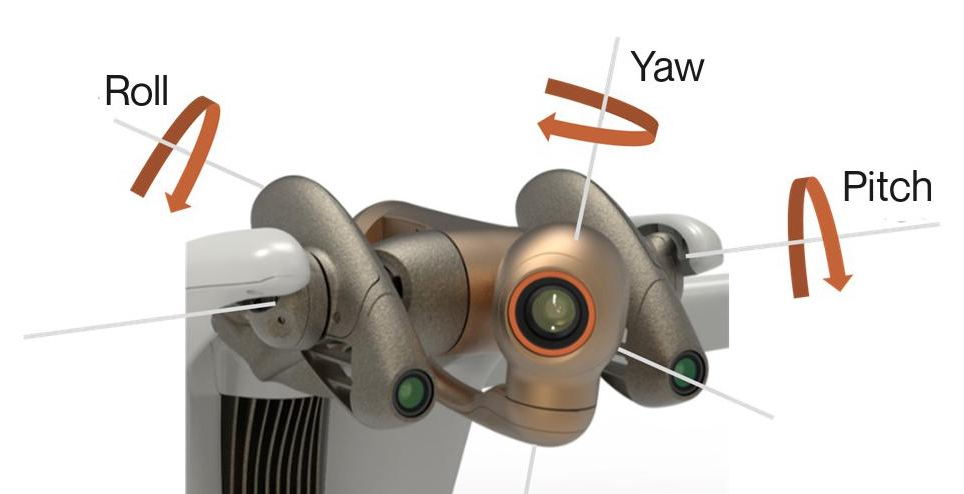
- El algoritmo EIS corrige los efectos de oscilación y distorsión de la lente gran angular y también realiza imágenes digitales de 3 ejes estabilización (Roll, Pitch y Yaw).
- El método consiste en aplicar una transformación geométrica de la imagen. La transformación geométrica está asociada con el sello de tiempo y la posición exacta gracias a la IMU.
- La transformación geométrica se aplica a cada imagen de acuerdo con la distorsión óptica, las vibraciones y los movimientos de la unidad de cámara medida.
Rango de pivote 292 °
La cámara tiene un rango de pivote horizontal de -116 ° / 176 ° alrededor del eje de cabeceo, lo que proporciona una observación por encima y por debajo del dron, que es un Oportunidad única en el mercado de micro-UAV.
![]()
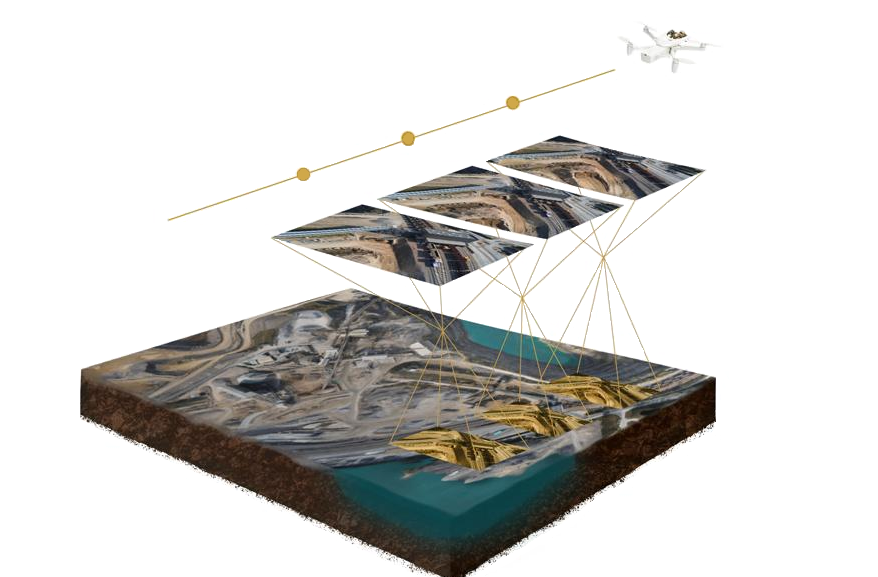
Fotogrametría
La fotografía aérea con vehículos aéreos no tripulados está cambiando la forma en que los especialistas realizan inspecciones y levantamientos. Los métodos de fotogrametría se utilizan para procesar imágenes recopiladas por UAV para crear modelos 2D y 3D, que luego permiten a los clientes programar el mantenimiento de los objetos encuestados de manera oportuna.
4G proporciona una fiabilidad sin precedentes del enlace de datos del dron. Los usuarios pueden operar UAV en áreas extensas, cerca de estructuras metálicas, edificios, sin temor a perder la comunicación.
Inspección y mapeo
Al combinar la IA del dron ANAFI Ai con la plataforma en línea PIX4Dinspect, los usuarios podrán realizar inspecciones más rápidas y eficientes que nunca. o. Los algoritmos de aprendizaje automático reconocen antenas en torres de telefonía celular, determinan su tamaño, altura, inclinación, acimut y verticalidad.
Haga clic en las imágenes a continuación para ver modelos 3D de demostración generados por ANAFI Ai.
Ejemplo n. ° 1

Ejemplo n. ° 2
Mejor matriz de su clase
La cámara del dron ANAFI Ai está equipada con un sensor CMOS de 48MP y 1/2 pulgada construido con tecnología de filtro de color Quad Bayer, que es más adecuado que nunca para inspección y fotogrametría. La matriz utilizada permite obtener imágenes detalladas con un amplio rango dinámico.
Fotos de alta resolución
ANAFI Ai es capaz de generar imágenes fijas de 48 megapíxeles, capturando así todos los detalles en alta resolución y creando una nube de puntos de alta densidad.
Nitidez significativa
Las misiones de inspección requieren la capacidad de identificar detalles minuciosos como números de serie, conectores, manchas de óxido y grietas incipientes.
Amplio rango dinámico
10 pasos de rango dinámico en modo estándar, 14 pasos en modo HDR. La gradación óptima de la imagen es esencial para crear puntos de nube consistentes y reconstrucciones 2D o 3D de alta calidad.
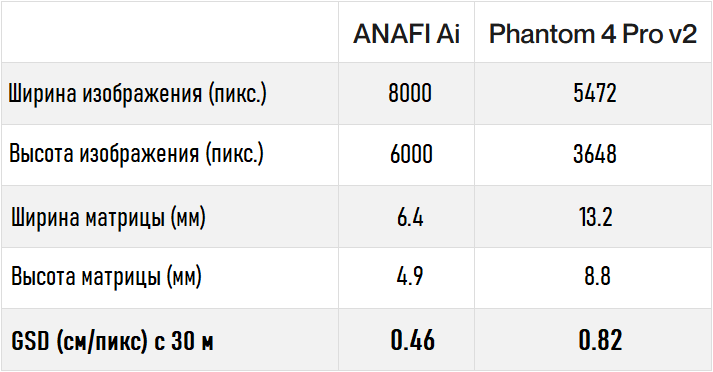
55% más de detalle que los sensores de 1 pulgada
El sensor Quad Bayer de 48 MP y 1/2 pulgada del dron ANAFI Ai es más nítido que los sensores de 20 MP y 1 pulgada utilizados en varios drones profesionales modernos. Las siguientes imágenes de la inspección del techo de ANAFI Ai y DJI Phantom 4 Pro V2.0 a la misma altura demuestran claramente este hecho.

Ideal para inspecciones
El cardán ANAFI Ai incluye un sistema de estabilización híbrido (electrónico mecánico) de 6 ejes que compensa las fluctuaciones de vuelo y garantiza la nitidez de la imagen. La cámara ANAFI Ai tiene un rango ajustable de -90 ° a 90 °, lo que la convierte en un instrumento aéreo ideal para ver la parte inferior de la base de un puente.
Inclinación controlable ± 90 °
Precisión
ANAFI Ai permite a los usuarios alcanzar un GSD de 0,46 cm / px desde una altura de 30 m, lo que significa planimetría de precisión relativa de hasta 0,92 cm.
En comparación, a la misma altura el DJI Phantom 4 Pro V2 proporciona un GSD de solo 0,82 cm / px. En otras palabras, ANAFI Ai puede mapear el mismo objetivo, volando más de 1,5 veces más alto que el Phantom, con un nivel de detalle equivalente.
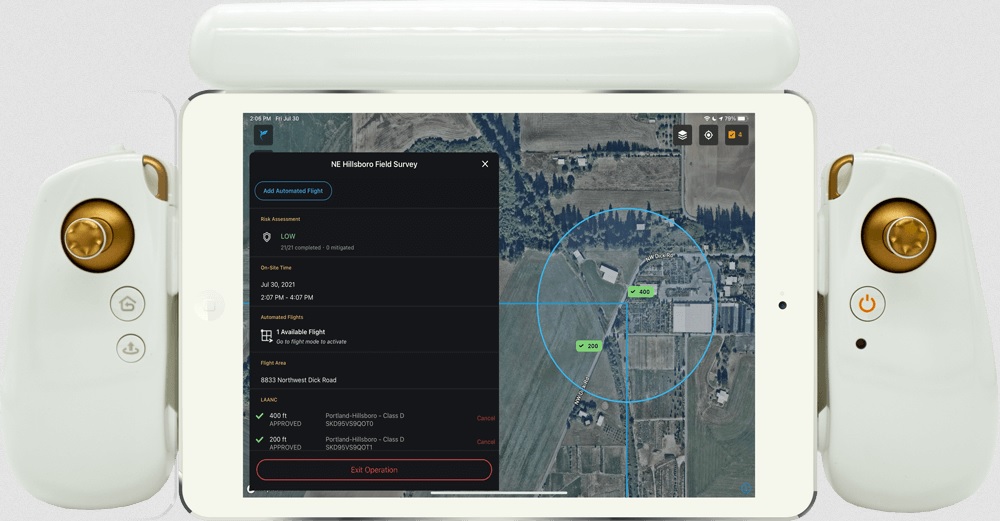
Capacidades de IA y 4G
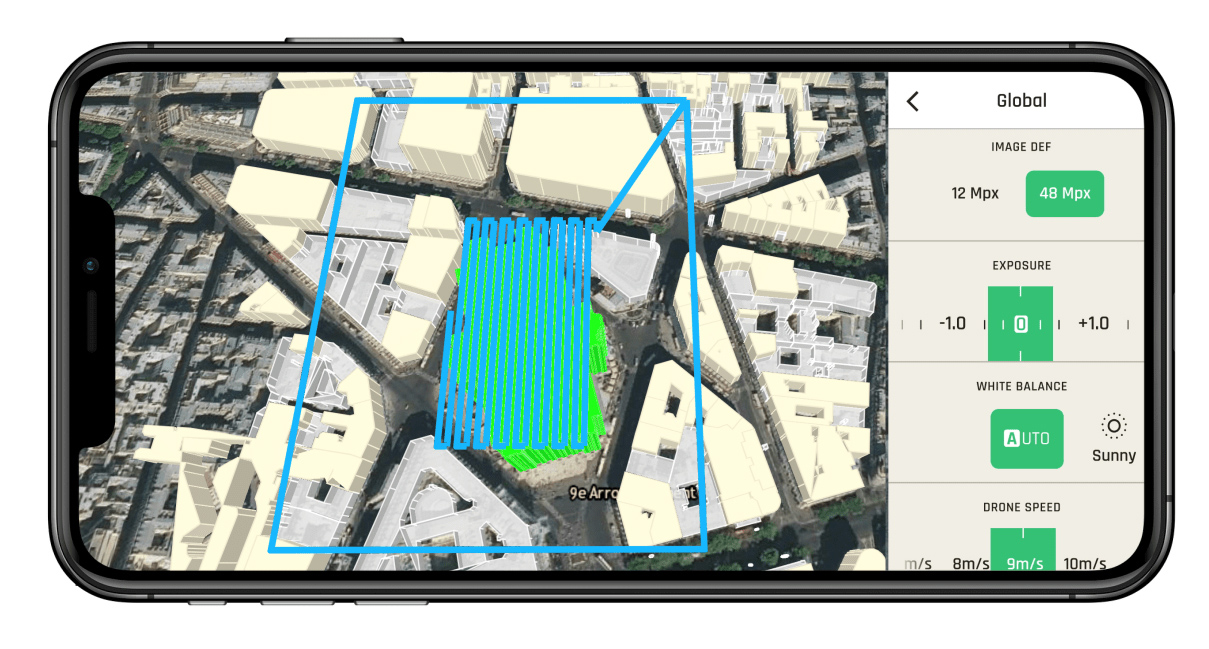
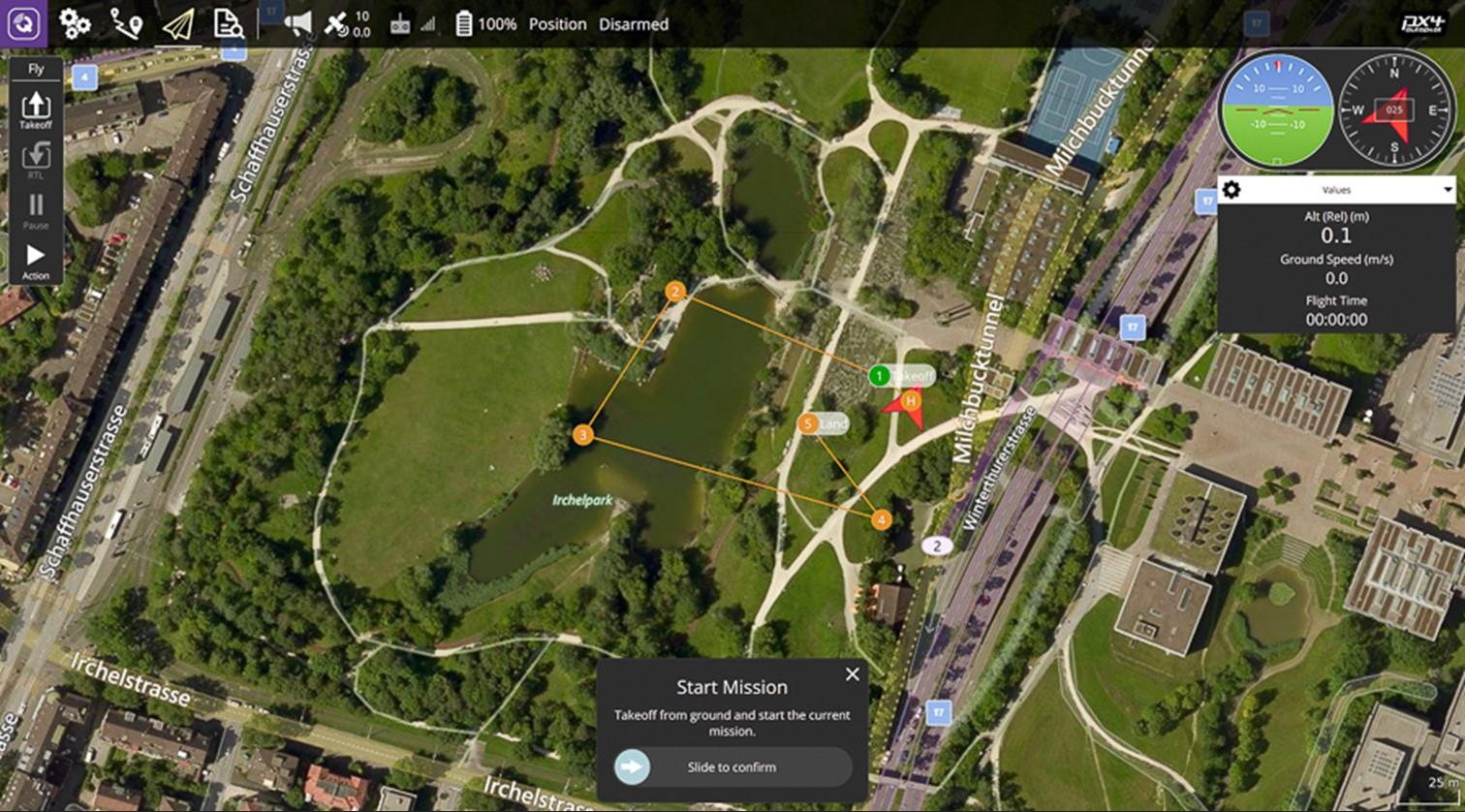
Una aplicación. Cualquier plan de vuelo
El potencial de la aplicación móvil FreeFlight 7 permite al usuario lanzar todas las misiones de reconocimiento, inspección y fotogrametría.

Modos de vuelo fotogramétricos disponibles
Los siguientes modos de vuelo fotogramétricos ahora están disponibles en la aplicación móvil FreeFlight 7:
- Grid
- Cuadrícula doble
- Circular
Crea un plan de vuelo con un solo toque
Un toque en el mapa interactivo FreeFlight 3D es todo lo que necesitas para la construcción de escaneo rápido. La inteligencia artificial determina automáticamente los parámetros de vuelo y la trayectoria óptimos. Las imágenes de 48MP con georreferenciación precisa de los sensores ANAFI Ai (IMU, GNSS y Flight Time) permiten una reconstrucción 3D precisa.
 Plan de vuelo automático creado con un toque en el registro de tierras 3D.
Plan de vuelo automático creado con un toque en el registro de tierras 3D.
- El fondo cartográfico de FreeFlight 7 es del software ArcGIS. La representación del edificio en 3D se basa en datos de OpenStreetMap que cubren ciudades de todo el mundo.
- Los sistemas de visualización garantizan la seguridad de un plan de vuelo determinado: los usuarios no deben preocuparse por los obstáculos. ANAFI Ai los evita de forma autónoma.
Vuelo autónomo
El sistema sensor omnidireccional ANAFI Ai, basado en visión estereoscópica, se orienta automáticamente en el sentido de la marcha.

El dron detecta obstáculos que se encuentran a 30 metros de distancia La tecnología de IA construye y actualiza constantemente la cuadrícula de relleno mientras se ejecuta un plan de vuelo determinado. Representa el entorno de los drones en vóxeles.
Los algoritmos determinan la mejor trayectoria para evitar chocar con obstáculos, mientras el dron permanece enfocado en su objetivo: la misión de vuelo asignada.

Conexión 4G
ANAFI Ai es el primer microdrón comercial equipado con un módulo 4G. Cubre más del 98% de las frecuencias utilizadas en todo el mundo.

Estudio de líneas eléctricas de alta tensión. Filmado con ANAFI Ai, editado con Pix4Dmatic. Tamaño de la escena: 4060 × 60 × 70 M. Número de imágenes: 2172. GSD: 1,3 cm / pix. Altura: 90 m Superposición frontal / lateral: 90% / 65%.
El dron puede cambiar sin problemas de Wi-Fi a 4G y viceversa, proporcionando así la conexión más confiable, que a su vez garantiza:
- La capacidad de realizar vuelos BVLOS
- Conexión estable incluso cuando se vuela en entornos con obstáculos y edificios
- Vuelo seguro en entornos con mucho ruido
- Calidad de enlace de video 1080p a 30 fps
- Carga directa de imágenes a servidores en la nube

Optimización del tiempo de vuelo
Según el desarrollador, se han logrado ahorros de tiempo significativos debido a la alta rendimiento de la imagen ANAFI Ai:
- 48MP permite que el dron vuele más de 1,5 veces más alto que los drones con sensores de 1 pulgada de 20MP, al tiempo que logra el mismo GSD. En otras palabras, una mayor altitud y una misión más rápida van de la mano.
- Fotografía a 1 fps: ANAFI Ai dispara dos veces más rápido que Autel EVO 2 y DJI Phantom 4 Pro V2.0.
Transferencia 4G en vuelo a PIX4Dcloud
En el proceso de creación de un modelo digital a partir de fotografías aéreas de un dron, transferencia de archivos y procesamiento las fotos son dos tareas que requieren mucho tiempo. ANAFI Ai ayuda a los usuarios a acelerar su flujo de trabajo. En particular, el sistema de drones permite:
- Transferir imágenes a servidores seguros directamente en vuelo utilizando la conexión 4G del dron.
- Inmediatamente comience a calcular objetos al final del vuelo: ortomosaicos, nube de puntos, modelos de elevación y malla texturizada.
- Comparta fácilmente mapas 2D y modelos 3D de calidad topográfica con empleados y clientes.
![]()
Compatibilidad con PIX4D Suite
ANAFI Ai ahora es totalmente compatible con un conjunto único de aplicaciones de fotogrametría móviles, de escritorio y en la nube que consta de:
Fotogrametría o LIDAR
¿Por qué elegir la fotogrametría para levantamientos y levantamientos? Además de la accesibilidad y la facilidad de uso, la fotogrametría aérea es la mejor opción cuando se requiere una interpretación visual de los datos.
Profesionales de fotogrametría
- Proporciona múltiples visualizaciones: ortomosaico, nube de puntos de color, malla texturizada.
- Crea una nube de puntos con mayor densidad, cada uno de los cuales contiene una cantidad significativa de información (altura, textura, color).
- Supera a LIDAR en la precisión de las representaciones fotorrealistas en 2D y 3D: LIDAR no proporciona un alto nivel de detalle contextual.
LIDAR cons
- Cuesta 100 veces más que un UAV con una matriz RGB.
- La complejidad del procesamiento de datos y posibles errores de interpretación.
- Es posible agregar información de color, pero complica el proceso.
- LIDAR genera únicamente nubes de puntos y está diseñado para casos y situaciones específicos.
SDK
El Parrot Software Development Kit es un conjunto de herramientas y software de código abierto para desarrolladores. Desde la creación del primer dron A. R. Drone, el software de código abierto de la compañía, sustenta las plataformas y herramientas de los desarrolladores, y Parrot
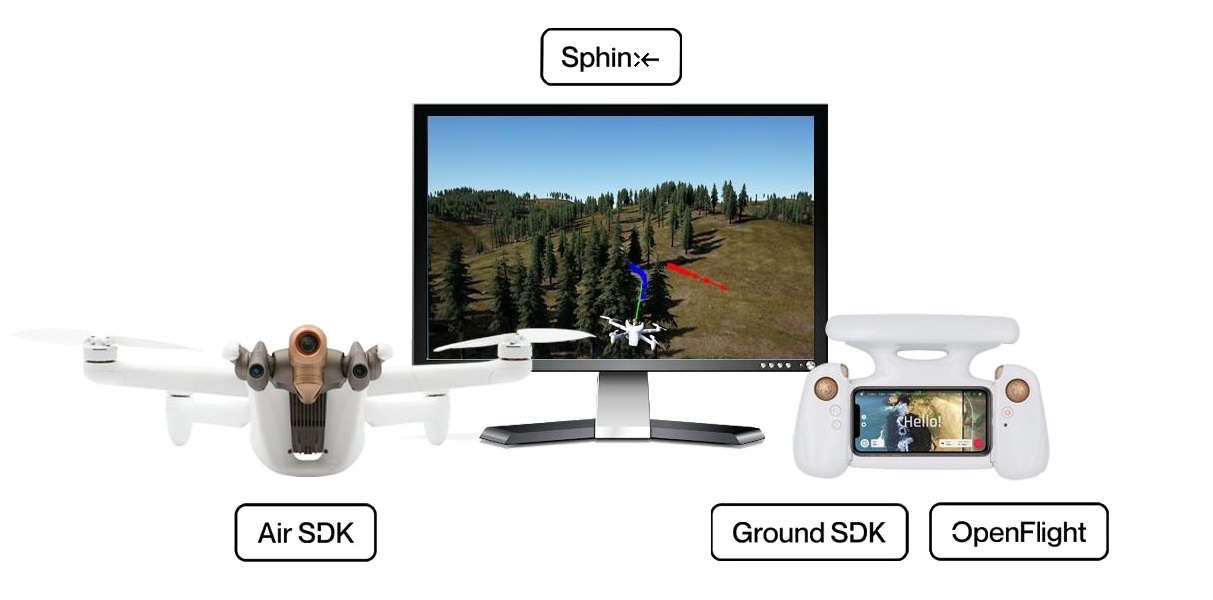
El desarrollador aclara que todos los recursos SDK de la empresa están disponibles de forma gratuita, sin registro ni seguimiento, en el portal " Parrot Portal para desarrolladores"... También puede unirse a los miles de desarrolladores en el foro Parrot donde puede discutir temas actuales directamente con los ingenieros de la empresa.
Air SDK
Ejecute su código en ANAFI Ai
Air SDK proporciona una arquitectura de tecnología revolucionaria para descargar y ejecutar código directamente en ANAFI Ai. Los desarrolladores pueden programar misiones de vuelo diseñadas a medida con acceso a todos los sensores de drones, interfaces de conexión y funciones de piloto automático.
Air SDK brinda acceso a bordo a:
- Todos los sensores (IMU, GPS, TOF) y modos de vuelo
- Transmisión de video y metadatos con todas las cámaras
- Interfaces de comunicación Wi-Fi, 4G, USB
- Mapas de profundidad y rejillas de llenado
- Creación de trayectoria de evitación de obstáculos
Cualquier desarrollador puede:
- Cambiar el estado del dron creando misiones de vuelo
- Cambiar el modo de navegación
- Agregar procesos de Linux integrados (para ejemplo, transferir datos a través de un canal 4G o usar visión por computadora)
El Air SDK es compatible con el lenguaje de programación C o Python. Air SDK viene con una guía de instalación detallada y documentación API. Muchos ejemplos de aplicaciones ilustran todas las posibilidades que ofrece su arquitectura única.
Ground SDK
Cree una potente aplicación móvil
Ground SDK es una plataforma de software Ground Control Station (GCS) para dispositivos móviles (tanto iOS como Android son compatibles). Permite a cualquier desarrollador crear una aplicación móvil para ANAFI Ai para el control posterior del dron directamente desde un dispositivo móvil. Todas las funciones de BVS (control, video, configuraciones) están disponibles a través de una API completamente documentada y fácil de usar.
OpenFlight
Estación de control de tierra de código abierto
Por primera vez, Parrot abre el código fuente para su aplicación de estación de control de tierra. OpenFlight es el núcleo de nuestra famosa aplicación FreeFlight 7 de código abierto. Esto permite al desarrollador concentrarse en agregar su propia funcionalidad e inmediatamente tener una aplicación de aspecto profesional lista para publicar en la AppStore.

OpenFlight contiene:
- Todos UX FreeFlight 7
- Todos los ajustes de interfaz
- Código para visualización 3D en tiempo real de obstáculos
- Código para administrar comunicaciones 4G
- OpenFlight se publica bajo una licencia BSD-3 con una guía de instalación completa y documentación completa.
Sphinx
Simulación fotorrealista 3D
Parrot Sphinx es una herramienta avanzada de simulación de drones. Los ingenieros de Parrot lo utilizan para desarrollar y probar todas las funciones de ANAFI Ai. El concepto general es simular el firmware real del dron con todos sus sensores en un entorno visual y físicamente realista.

Parrot Sphinx permite:
- Simular todas las cámaras y sensores
- Simular mapas de profundidad y segmentación imágenes
- Navega por muchas escenas 3D realistas
- Conéctate a diferentes tipos de controles remotos
- Usa scripts para controlar la simulación
- Agrega peatones y vehículos
- Visualizar y registrar datos de vuelo
- Ajustar los sensores de la aeronave y los elementos físicos circundantes
- Controlar el factor en tiempo real
Parrot Sphinx está construido sobre la base de componentes estándar:
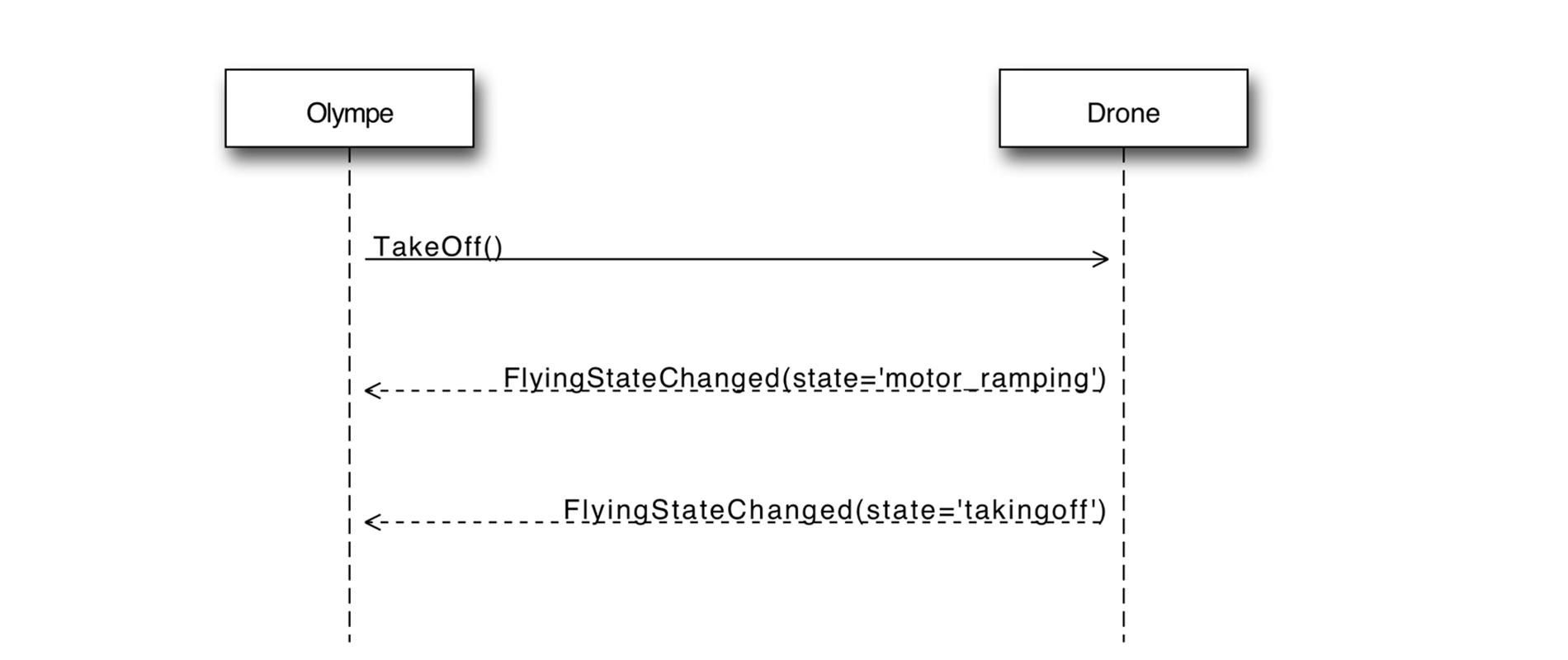
Olympe
Python para controlar ANAFI Ai
Olympe proporciona una interfaz de programación de controlador Python para ANAFI Ai. El propósito original de Olympe era interactuar con el entorno de modelado Sphinx. Olympe también puede controlar un ANAFI Ai físico desde una computadora remota.
El marco de Olympe permite:
- Conectarse a ANAFI Ai simulado o físico
- Enviar mensajes de comando (pilotaje, orientación de la cámara, volver a casa, Plan de vuelo)
- Iniciar y detener la transmisión de video desde todas las cámaras
- Grabar transmisión de video y metadatos sincronizados
PdrAW
Advanced Media Player
PDrAW es un visor de vídeo avanzado para medios ANAFI Ai. El visor admite videos en streaming (RTP / RTSP) y grabados (MP4) en plataformas Linux, macOS, Android e iOS. PDrAW viene como una biblioteca (libpdraw), una biblioteca contenedora (libpdraw-backend) y un ejecutable independiente (pdraw).
PDrAW también administra metadatos de video. En ANAFI Ai, tanto la transmisión como el video grabado incluyen metadatos que están disponibles y documentados públicamente, lo que permite un procesamiento avanzado de video aéreo.
Modelos C. A. D.
Parrot proporciona modelos 3D de sus drones para la integración en su diseño CAD para la rápida integración de prototipos y accesorios.
Compatibilidad con MAVLink y GUTMA
ANAFI Ai es compatible con el protocolo estándar MAVLink v1 de código abierto, que permite el intercambio de datos en tiempo real entre el UAV y la estación de control. ANAFI Ai se puede controlar manualmente o mediante la planificación de vuelo automática desde una estación base compatible con MAVLink como QGroundControl.
* QGroundControl
La interfaz ANAFI Ai es compatible con el protocolo de datos de vuelo estándar GUTMA de código abierto. La Asociación Global UTM es un consorcio de los principales actores en el campo del control del tráfico aéreo.

El mayor ecosistema de socios para drones Parrot
Parrot continúa expandiendo el ecosistema global de proveedores de software para drones a través de su programa SDK para socios Ofreciendo soluciones especializadas y únicas para las crecientes y cambiantes necesidades de los usuarios profesionales.
Parrot para cada necesidad empresarial
Para aprovechar al máximo el proceso de inspección, Parrot ofrece a sus clientes un ecosistema de software de drones compatible que abarca desde gestión de flotas hasta compilación de vuelos planificar e importar los registros de vuelo, antes de disparar, mapear, monitorear y analizar los datos recibidos.
PIX4D × Parrot
Aplicaciones de modelado 2D / 3D. Un conjunto único de aplicaciones de fotogrametría móviles, de escritorio y en la nube.
Verizon x Skyward x Parrot
Solución de dron 4G LTE en los Estados Unidos. El primer dron robótico ANAFI Ai de su tipo conectado a la red Verizon 4G LTE con el software Skyward preinstalado. Abre la puerta para transferencias de datos casi en tiempo real, implementaciones remotas y vuelos fuera de la línea de visión.

Skyward × Parrot
Integración y aprendizaje dentro de la capacidad de ANAFI. Plataforma de gestión de aviación que incluye espacio aéreo, acceso LAANC y capacitación, equipos y conectividad para el despliegue de flotas de drones empresariales.

DroneSense × Parrot
Construye, administra y escala tus programas de drones. Los profesionales de vehículos aéreos no tripulados en el sector de la seguridad pública pueden utilizar el conjunto completo de capacidades de DroneSense, especialmente diseñado para las necesidades de los socorristas.

Parrot Ecosystem Partners

Parrot Affiliate Program
El desarrollador propone ampliar las capacidades de su programa para drones integrando su SDK.
Ciberseguridad
Confidencialidad de datos
El desarrollador señala que no recopila cualquier dato sin el consentimiento de los usuarios. La decisión de transferir datos a la infraestructura de Parrot o no recae únicamente en los propios usuarios. Los datos alojados en Parrot permiten al usuario sincronizar datos de vuelo y planes de vuelo entre diferentes dispositivos, además de facilitar el soporte y permitir que Parrot mejore sus productos.
ANAFI Ai cumple con el Reglamento General de Protección de Datos de la Unión Europea (GDPR) y va más allá, por ejemplo, le permite eliminar todos los datos con 1 clic, proporcionando así a los usuarios el control más fácil. Este problema de un clic se resuelve en la aplicación móvil FreeFlight7 o en la configuración de privacidad de la cuenta Parrot. Cloud. Por lo tanto, los usuarios en cualquier momento no solo pueden dejar de intercambiar datos, sino que también pueden solicitar fácilmente su eliminación.
Si el usuario consiente el intercambio de datos, su tratamiento se llevará a cabo en un formato completamente transparente, descrito en detalle en la Política de Privacidad de Parrot.
Cuando ANAFI Ai está conectado a Skycontroller 4 a través de 4G, la infraestructura Parrot se utiliza para emparejar el dron y el control remoto. Si el usuario no ha iniciado sesión en una cuenta de Parrot. Cloud, aún puede usar una conexión 4G con una cuenta temporal única. Cuando se usa la infraestructura de Parrot para el emparejamiento 4G, el video se encripta usando una clave acordada entre el dron y el control remoto, Parrot no tiene acceso al video sin encriptar.

Compatible con FIPS140-2 y elemento seguro CC EAL5
ANAFI Ai tiene un elemento de seguridad Wisekey integrado que cumple con NIST Certificación FIPS140-2 Nivel 3 y Common Criteria EAL5. Un elemento de seguridad similar también está integrado en el hardware de control Skycontroller 4.
Funciones del elemento de seguridad:
- Realiza operaciones criptográficas
- Almacena y protege información confidencial
Utiliza una clave privada ECDSA con parámetros de dominio P521, única para cada dron. No se puede extraer del elemento de seguridad. Y el certificado asociado con esta clave está firmado por una autoridad de certificación.
Wisekey protege la integridad del firmware, proporciona una identificación única del dron para el emparejamiento 4G y una autenticación sólida, y una firma digital única de las fotos tomadas por el dron.

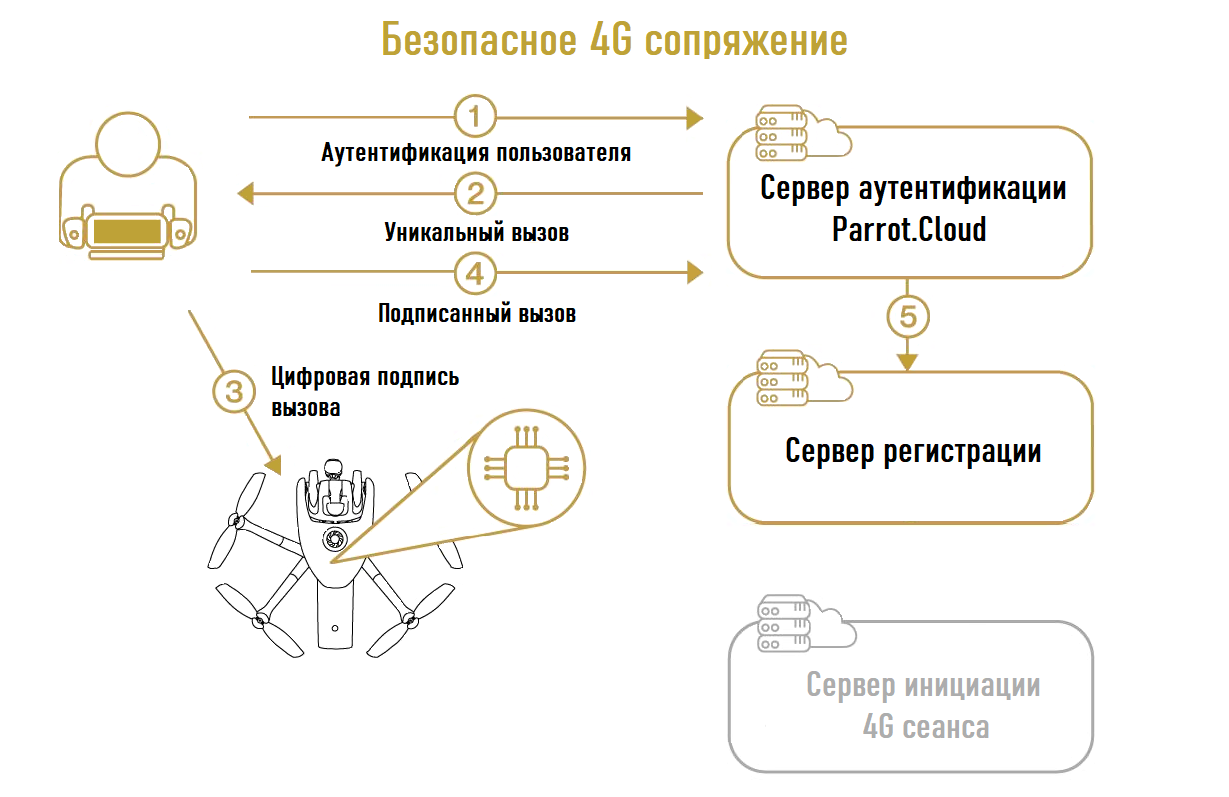
Conexión segura 4G y autenticación fuerte
el proceso de emparejamiento seguro de dispositivos. Durante este proceso, el usuario confirma de manera confiable que está conectado a un dron específico. Gracias a ANAFI Ai Secure Element, puede hacer esto sin ingresar una contraseña dentro del dron.
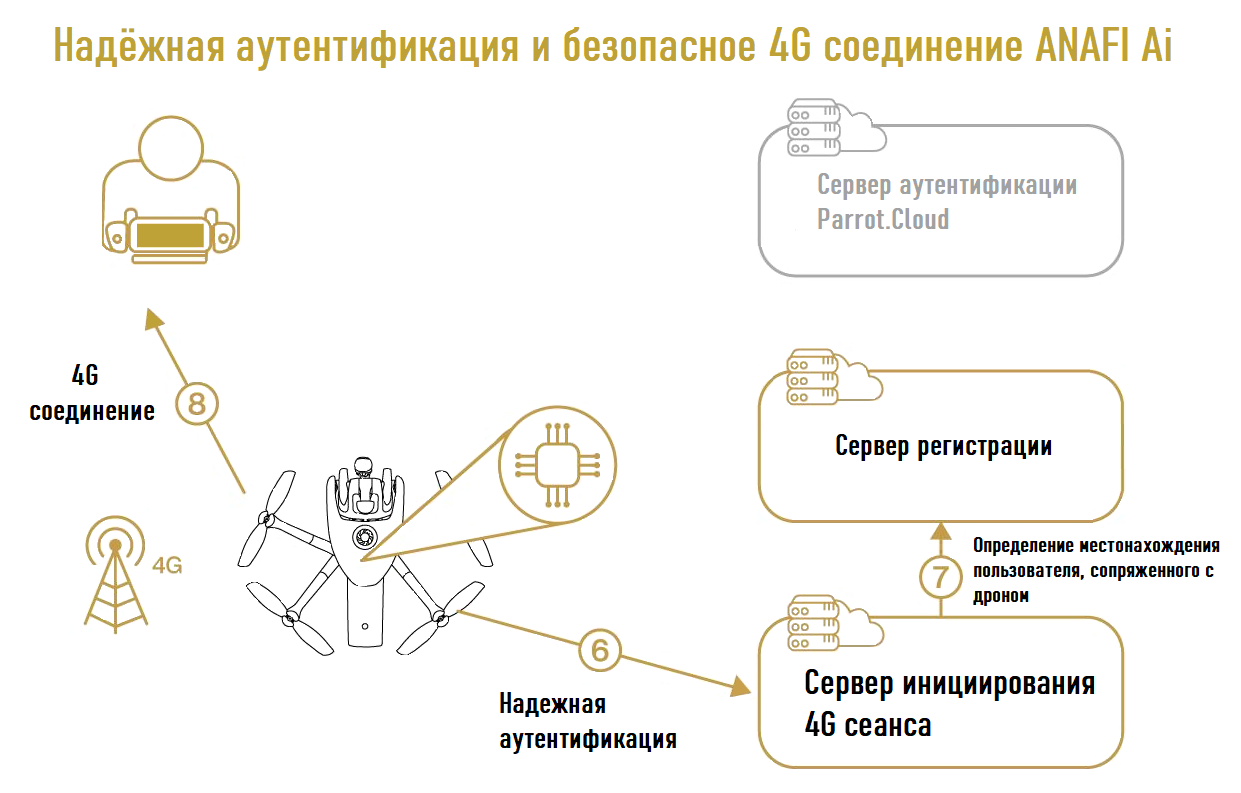
Los servidores Parrot registran la comunicación entre el usuario y el dron. Cuando se pierde la conexión Wi-Fi entre el usuario y el dron, ANAFI Ai cambiará automáticamente a la conexión 4G. ANAFI Ai realiza una autenticación sólida en los servidores de Parrot utilizando su clave privada almacenada en el elemento seguro. Los servidores Parrot buscan usuarios conectados y proporcionan una interfaz entre ANAFI Ai y Skycontroller 4.
Para proteger el control de drones y las transmisiones de video que llegan a Skycontroller 4, ANAFI Ai admite los protocolos TLS, DTLS y SRTP.
Inicialización y actualización seguras
La secuencia de arranque de la aeronave está protegida: el sistema verifica que utiliza el software Parrot y que este software no ha sido manipulado. Se realiza una verificación de seguridad en cada inicialización. El servicio de actualización también controla la firma digital de las actualizaciones de software.
Configuración de claves de usuario en Secure Element
Los usuarios de ANAFI Ai tienen acceso a una cuenta de operador especial Secure Element. Esta cuenta se utiliza para configurar claves que son relevantes para este usuario. Los usuarios pueden configurar Secure Element con las claves públicas de los proveedores de misión en los que confían. ANAFI Ai solo realizará misiones que estén firmadas con estas claves. Este proceso evita que los atacantes realicen misiones de vuelo maliciosas en el dron.
Fotos firmadas digitalmente
Secure Element de ANAFI Ai puede firmar digitalmente imágenes de drones. Esta firma acredita que:
- Dicha imagen firmada fue tomada por el vehículo aéreo no tripulado indicado.
- Ni la imagen en sí ni sus metadatos se han procesado (voluntariamente o no); los metadatos, también conocidos como EXIF y XMP, contienen información sobre la fecha, hora y ubicación de la imagen.

En otras palabras, la firma digital protege todos los datos relacionados con la imagen, incluido el lugar y la hora en que se tomó, y qué dron ANAFI Ai.
Tanto los usuarios como los socios que ofrecen soluciones de software que utilizan fotografía con drones pueden verificar la firma digital de las fotos de ANAFI Ai con el certificado del dron o mediante el catálogo de claves públicas proporcionado por Parrot.
Transparencia y controles de seguridad continuos con Bug bounty
Parrot usa protocolos estándar y formatos de archivo siempre que es posible. No hay código ofuscado ni características ocultas. Esto permite al usuario comprender cómo funcionan los productos Parrot y probar su seguridad. Además, OpenFlight, el software utilizado para controlar el dron, es de código abierto, lo que brinda a los usuarios un control total.
En abril de 2021, Parrot lanzó el programa Bug Bounty con YesWeHack, la primera plataforma de seguridad de colaboración colectiva de Europa. A través de esta asociación, Parrot aprovecha la vasta comunidad de investigación de ciberseguridad de YesWeHack para identificar vulnerabilidades potenciales en sus drones, aplicaciones móviles y servicios web.
El programa Bug Bounty consta de dos fases:
Los programas privados inicialmente brindan acceso exclusivo a investigadores de seguridad selectos e incluyen futuros modelos de drones Parrot. La experiencia y las diversas habilidades de los investigadores confirmarán el alto nivel de seguridad de los productos antes de su salida al mercado, lo que ayudará a mejorar la seguridad de los usuarios de Parrot y la protección de sus datos.
Después de esta primera ronda del programa privado Bug Bounty y después de la comercialización, los productos pasan al programa público. Luego, su seguridad es examinada rigurosamente por toda la comunidad YesWeHack de más de 22,000 investigadores de ciberseguridad.

Gestión de datos
Parrot Cloud permite a los usuarios que eligen compartir sus datos gestionar datos de vuelo y flota, así como multimedia datos recibidos por sus drones.
Datos recopilados
Parrot Cloud recopila 4 tipos de datos:
Estáticos (datos del producto):
- Aeronaves número de serie
- Número de serie de la batería
- Versión del firmware de la aeronave y la batería
- Versión del hardware de la aeronave y la batería
- Modelo del dispositivo
- Versión de FreeFlight 7 Versión
Eventos
- Alertas: Batería, piloto automático, sensores
- Comunicación: conectar / desconectar, iniciar transmisión, alerta de interferencia, señal débil
- Cámara: estadísticas de transmisión, cambios de configuración
- Vuelo: cambio de estado (despegue, aterrizaje, flotando, etc.), activación de una tarea de vuelo (plan de vuelo, fotogrametría)
"Imágenes contextuales"
- Timelapse- instantánea y (una vez cada 2 minutos)
- Aprendizaje profundo (mapeo de más objetos, paisajes para mejorar la autonomía de vuelo, seguimiento, evitación de obstáculos)
- Stereovision (mapa de profundidad)
- Imágenes activadas por evento
- Inicio y fin de declaraciones de vuelo estacionario precisas, aterrizaje preciso
- Choque de drones
- Las caras se difuminan automáticamente durante la transmisión
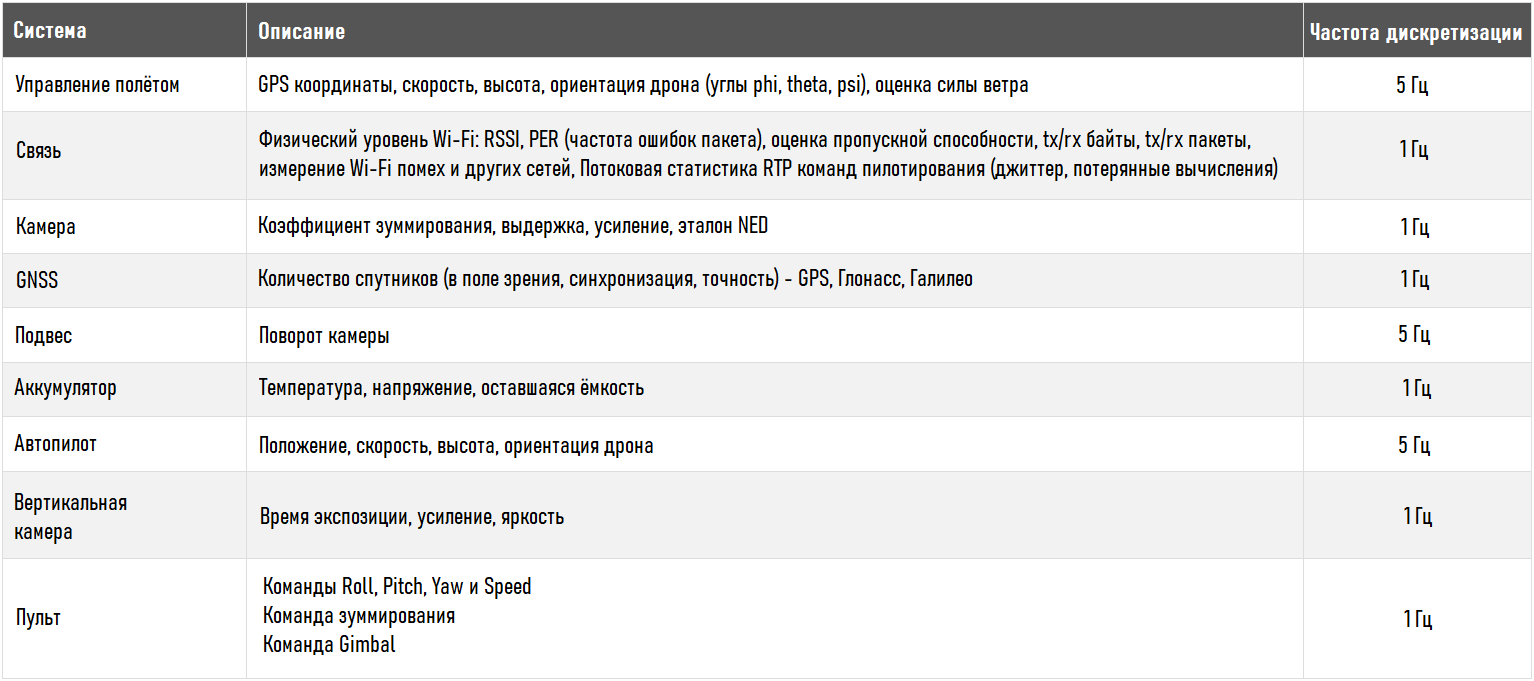
Telemetría
Uso final de los datos recopilados
Parrot solo recopila y usa datos de clientes que han aceptado compartirlos para mejorar la calidad de sus productos...
Gestión de mantenimiento
Mantenimiento preventivo: Nuestras herramientas recopilan toda la información relacionada con las misiones (tipo de misión, tiempos de despegue y aterrizaje, número de misiones, ubicación del dron, velocidad de vuelo, plan de vuelo y configuración de AirSDK). Esto le permite recibir información precisa sobre el estado de la flota de drones ANAFI Ai (así como sus controladores y baterías) en tiempo real.
Mantenimiento correctivo: La información recopilada es útil para determinar rápidamente el estado de un dron o batería en particular.
Mejora de la inteligencia artificial (IA)
Los elementos de IA de ANAFI Ai (PeleeNet, redes convolucionales, etc.) ofrecen a los usuarios servicios y características incomparables: evitación de obstáculos, seguimiento de objetivos, varios modos de vuelo. La calidad de la IA depende de la cantidad y calidad de los datos recopilados (imágenes y videos): estos datos alimentan el aprendizaje automático. En este sentido, la calidad de los datos no es el único elemento decisivo: los metadatos asociados a estos datos también son fundamentales. Por este motivo, nuestra herramienta recopila imágenes y metadatos de forma regular y dependiendo de los eventos, por un total de 30 a 50 MB por minuto.
Características de vuelo
Características aerodinámicas
Accionamientos y aerodinámica
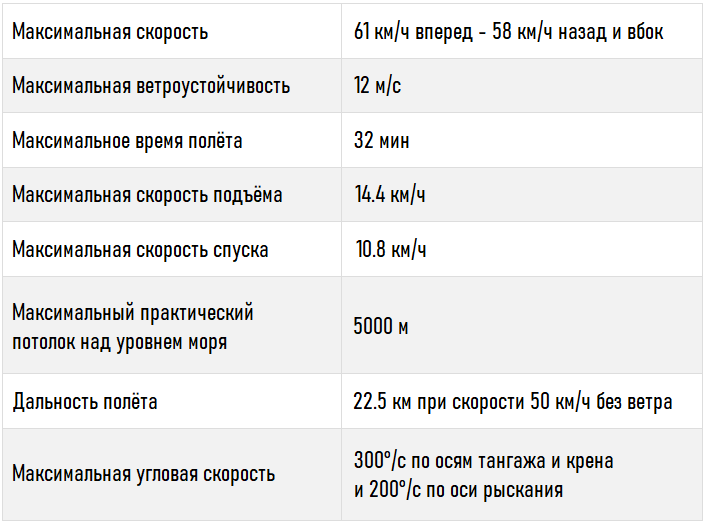
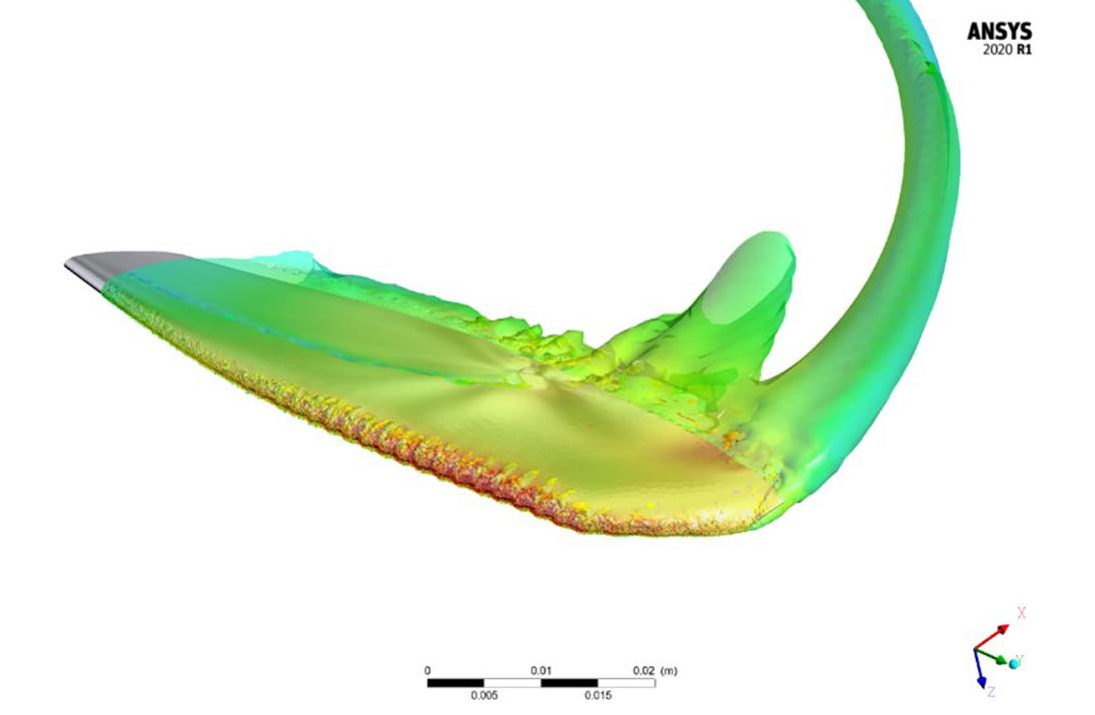 Imagen CFD de palas de hélice ANAFI Ai
Imagen CFD de palas de hélice ANAFI Ai
Nuevas palas de hélice de biomimetismo con ballenas de borde de ataque en forma de joroba. Este enfoque hizo posible aumentar la eficiencia de propulsión de la planta de energía, que en la salida proporcionó un aumento en el empuje a la misma velocidad de rotación. Este efecto es comparable a un aumento del diámetro del rotor.
También se reduce el ruido acústico, especialmente el ruido tonal, que emana del borde de entrada. Por lo tanto, ANAFI Ai es más silencioso [71,5 dB SPL (A) a 1 m] que Skydio 2 [76,4 dB SPL (A) a 1 m].
- Tiempo de vuelo superior a 32 minutos
- Gracias a las características aerodinámicas optimizadas del fuselaje y al sistema de propulsión ANAFI Ai, la velocidad máxima en vuelo hacia adelante es de 61 km / h, con vuelo lateral y vuelo hacia atrás 58 km / h
- Máx. resistencia al viento 12,7 m / s.
- Gracias a la alta eficiencia del par motor / hélice y la alta autonomía de la batería, la autonomía es de 22,5 km (a una velocidad constante de 50 km / h en tiempo tranquilo).
 Imágenes CFD de haces ANAFI Ai
Imágenes CFD de haces ANAFI Ai
Sensores
Para garantizar un vuelo seguro ANAFI Ai está equipado con:
- 2 × IMU (ICM-40609-D e ICM42605)
- Magnetómetro LIS2MDL
- Módulo GPS UBX-M8030
- TI OPT3101 tiempo de vuelo (ToF)
- Barómetro LPS22HB
- Cámara vertical
Características del sensor
Vuelo IMU: ICM-40609-D
- Giroscopio de 3 ejes
- Rango: ± 2000 ° / s
- Resolución: 16,4 LSB / ° / s
- Desplazamiento / Precisión: ± 0,05 ° / s (después de la calibración térmica y dinámica)
- Acelerómetro de 3 ejes
- Rango: ± 16 g
- Resolución: 2,048 LSB / mg
- Desplazamiento / precisión: ± 0,5 mg (XY) ± 1 mg (Z) (después de la calibración térmica y dinámica)
- Control de temperatura s: sistema de calefacción controlado en relación con la temperatura ambiente, estabilizado dentro de: ± 0,15 ° C
- Frecuencia de medición: 2 kHz
Magnetómetro: LIS2MDL
- Rango: ± 49,152G
- Resolución: 1,5 mG
- Desplazamiento / Precisión: ± 15 mG (después de la compensación, a la velocidad máxima del motor)
- Frecuencia de medición: 100 Hz
Barómetro: LPS22HB 1
- Rango: 260 a 1260 hPa
- Resolución: 0,0002 hPa
- Desplazamiento / precisión: ± 0,1 hPa
- Control de temperatura: sistema de calefacción controlado en relación con la temperatura ambiente, estabilizado dentro de: ± 0,2 ° C
- Frecuencia de medición: 75 Hz
- Ruido de medición: 20 cm RMS
GNSS: UBX-M8030 1
- Antena de parche de cerámica 25 × 25 × 4 mm, permitiendo una mejora de ganancia de 2 dB con respecto a ANAFI 1
- Sensibilidad: arranque en frío -148 dBm / seguimiento y navegación: -167 dBm
- Tiempo hasta la primera corrección: 40 segundos
- Precisión / Exactitud: posición (desviación estándar 1,4 m), velocidad (desviación estándar 0,5 m / s)
Cámara vertical
- Sensor de imagen formato: 1/6 pulgada
- Resolución: 640 × 480 píxeles
- Sensor de imagen con obturador global
- Blanco y negro
- FOV: Ángulo de visión horizontal: 53,7 ° / ángulo de visión vertical: 41,5 °
- Longitud focal: 2,8 mm
- Medición de la velocidad del flujo óptico en el suelo a 60 Hz
- 15 Hz y ajuste de precisión @ 5Hz
ToF: TI OPT3101
- Rango: 0-15 m
- Resolución: 0,3 mm
- Precisión b: ± 2 cm (después de la calibración)
- Frecuencia de medición: 64 Hz
Cámara vertical IMU: ICM-42605
- Giroscopio de 3 ejes
- Rango: ± 2000 ° / s
- Resolución: 16,4 LSB / ° / s
- Desplazamiento / precisión: ± 0,1 ° / s (después de dinámica Calibración)
- Acelerómetro de 3 ejes
- Rango: ± 16g
- Resolución: 2.048 LSB / mg
- Desplazamiento / Precisión: ± 2.0 mg (XY) ± 5,0 mg (Z) - después de la calibración dinámica
- Frecuencia de medición: 1 kHz
- Sincronización de hardware con cámara vertical, precisión: 1 μs
Piloto automático
El controlador de vuelo ANAFI Ai proporciona un pilotaje simple e intuitivo: no se requiere entrenamiento para operarlo. Le permite automatizar muchos modos de vuelo (plan de vuelo, camarógrafo, despegue manual, Smart RTH). Los algoritmos de fusión de sensores combinan datos de todos los sensores para estimar la relación, la altitud, la posición y la velocidad de ANAFI Ai.
La evaluación del estado es esencial para el correcto funcionamiento de los drones. Los cuadricópteros son inherentemente inestables cuando el controlador de vuelo se usa con un bucle abierto; para controlarlos fácilmente, sin mencionar el control autónomo, es necesario estabilizarlos mediante algoritmos de control de lazo cerrado. Estos algoritmos calculan y envían los comandos a los motores requeridos por ANAFI Ai para lograr las trayectorias deseadas.

Vuelo en interiores
En ausencia de una señal GPS, ANAFI Ai se basa principalmente en las mediciones de la cámara vertical para estimar la velocidad y la posición. El rendimiento de la cámara vertical se determina mediante dos algoritmos principales:
- Flujo óptico para estimación de velocidad
- Detección de puntos clave y coincidencia para estimación de posición
Cámara vertical Los algoritmos pueden funcionar en condiciones de poca luz gracias al ANAFI Ai equipado con un par de luces LED ubicadas junto a la cámara vertical. Permiten que el dron permanezca estable, especialmente cuando vuela en interiores o en ausencia de GPS, a una altitud de menos de 5 m sobre el suelo. La potencia de las luces LED se adapta automáticamente, según las necesidades del algoritmo.
Vuelo autónomo
Características principales
- Sistema de detección rotatorio con amplio campo de visión
- Extracción de la profundidad del espacio circundante basada en la alineación estéreo y la profundidad por movimiento
- Representación del entorno en forma de cuadrícula de relleno
- Detección autónoma y evitación de obstáculos en velocidades de hasta 29 km / h
Este capítulo detalla los sensores, el hardware y los algoritmos utilizados por ANAFI Ai para permitir el vuelo autónomo. Está organizado de la siguiente manera:
- Una descripción detallada del sistema de percepción ANAFI Ai
- Algoritmos de percepción utilizados para reconstruir el entorno 3D que rodea a los drones
- Reprogramación y obstáculo evitación

Estrategia del sistema de percepción
La percepción del entorno tridimensional es una habilidad clave para lograr un vuelo autónomo, especialmente en espacios reducidos. Es un requisito previo para la detección garantizada y la evitación de obstáculos, lo que reduce la carga para el operador del dron, aumenta el éxito de la misión y garantiza la seguridad de la aeronave.
Para liberar todo el potencial de una cámara voladora, que puede moverse libremente y rotar en todas direcciones sin restricciones, se requiere una solución de detección eficaz. En particular, el sistema de detección debería poder recibir información sobre el entorno en direcciones que correspondan al movimiento hacia adelante en vuelo, independientemente de la orientación de la cámara.
ANAFI Ai se basa en una solución técnica única basada en dos cardanes mecánicos para separar la orientación de la cámara principal y el sistema de detección:
- La cámara principal está montada en un 3- cardán del eje, por lo que la orientación 3D es independiente de la orientación del dron.
- El sistema de detección está montado en un cardán de un solo eje: conectado al movimiento de guiñada del dron, se puede orientar en cualquier dirección.
 Estabilizador dual ANAFI Ai para percepción y visualización.
Estabilizador dual ANAFI Ai para percepción y visualización.
Los ejes de inclinación de los dos colgadores son colineales y combinados para lograr un diseño ultracompacto.
Gracias a esta solución, es posible dirigir la cámara principal y el sistema de detección en dos direcciones diferentes. Este diseño evita el uso de costosas cámaras en los lados, la parte superior, la parte inferior y la parte trasera del dron y, al mismo tiempo, proporciona un gran campo de visión disponible para el sistema de detección.
Esta sección está organizada de la siguiente manera:
- Detalles de los sensores utilizados para el sistema de detección
- Especificaciones para el cardán de la cámara principal y el cardán del sistema de detección
- Estrategias para apuntar al sistema de detección para aprovechar el potencial de la estructura de suspensión dual
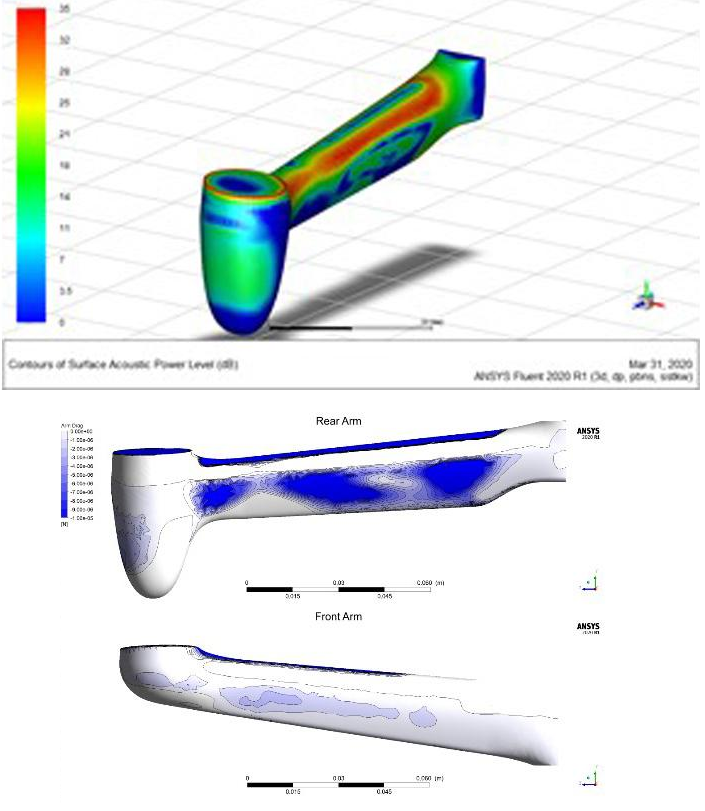
Sensores
El sistema de detección se basa en un par de cámaras idénticas con un eje de paso...
 Bisagra mecánica de 1 eje para sistema de detección ANAFI Ai.
Bisagra mecánica de 1 eje para sistema de detección ANAFI Ai.
Las especificaciones del sensor son las siguientes:
- Modelo: Onsemi AR0144CSSM28SUD20
- Color: Monocromo
- Resolución: 1280 × 800 píxeles
- Velocidad de fotogramas: 30 fps
- Obturador global
- Campo de visión horizontal completo: 118 ° (110 ° utilizable para detección)
- Campo de visión vertical completo: 72 ° (62 ° utilizable para detección)
- Longitud focal: 1,47 mm (0,039 pulgadas - 492,94610 píxeles)
- Apertura: f / 2,7
Especificaciones El los estereopares son los siguientes:
- Eje de paso común
- Línea de base / distancia: 62 mm (2,44 pulgadas)
- Captura sincrónica a 30 fps

Doble cardán
El cardán mecánico de la cámara principal es un pitch-rol mecánico de 3 ejes l-guiñada "con las siguientes características:
- Limitadores de cabeceo: -116 ° / 176 °
- Limitadores de balanceo: / - 36 °
- Limitadores de guiñada: / - 48 °
La suspensión mecánica del sistema de detección es una suspensión de un solo eje con las siguientes características:
- Topes en el paso: -107 ° / 204 °
- Tiempo de viaje de un tope a otro: 300 ms
El sistema de detección tiene un recorrido de 311 ° (de los cuales 296 ° no están enmascarados por el cuerpo del dron), lo que permite retroceder percepción.
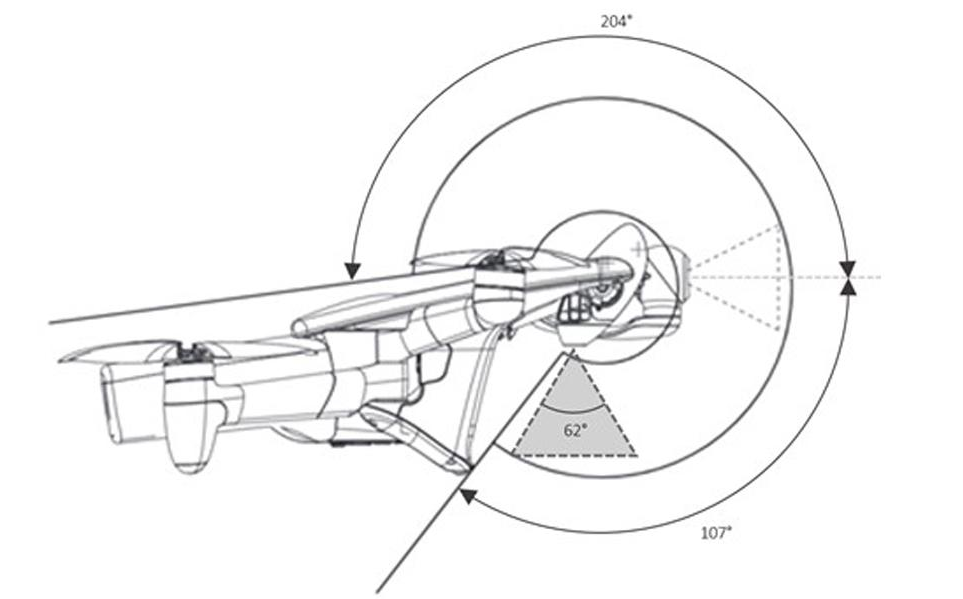
Campo de visión vertical instantáneo y sistemas limitantes de percepción ANAFI Ai.
El sistema fue diseñado de tal manera que:
- Las palas de la hélice no entran en el campo de visión de la cámara principal
- El la cámara no cubre el campo de visión del sistema de percepción
- La cámara principal y el sistema de detección se pueden plegar completamente para proteger las lentes
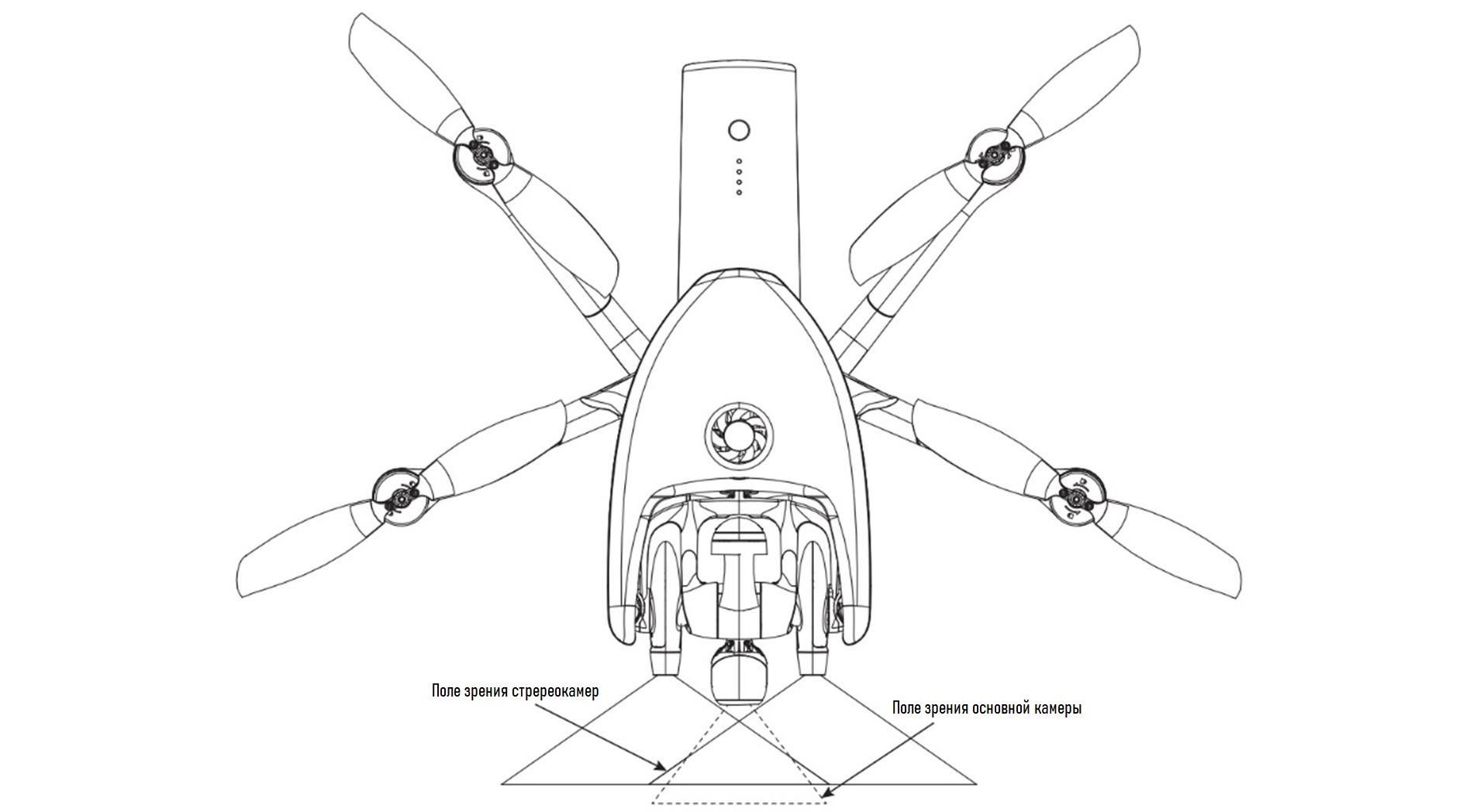 El campo de visión horizontal del sistema de percepción ANAFI Ai.
El campo de visión horizontal del sistema de percepción ANAFI Ai.
Al recostarse, el sistema de percepción se mueve a la posición más alta, proporcionando así una visión clara.
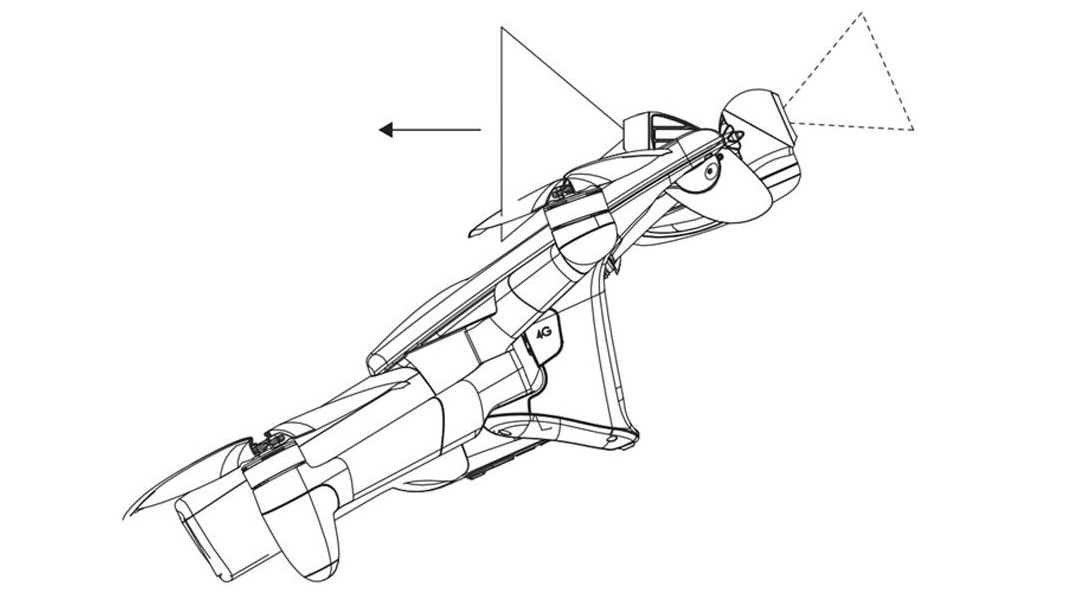
Percepción de ANAFI Ai en posición completamente reclinada para vuelo hacia atrás.
Reconstrucción del entorno
La reconstrucción del entorno tridimensional circundante para el vuelo autónomo se realiza en dos etapas:
- Extraer información de profundidad de la percepción en forma de mapas de profundidad
- Combinar datos de mapas de profundidad en una cuadrícula de relleno tridimensional
Se utilizan dos métodos para obtener mapas de profundidad de sensores de percepción:
- Profundidad basada en alineación estéreo
- Profundidad de movimiento
Profundidad de correspondencia estéreo
El método principal de extracción de profundidad La información se basa en el paralaje entre dos cámaras estéreo del sistema de detección. Al fotografiar el entorno en una dirección, pero desde dos posiciones diferentes, los objetos en el campo de visión del sistema de percepción aparecen en diferentes posiciones en las imágenes obtenidas por dos cámaras. Cuanto más cerca esté el sujeto, mayor será la diferencia de posición.
Así, la estrategia es determinar los puntos en las imágenes obtenidas por las cámaras estéreo izquierda y derecha correspondientes al mismo objeto en el campo de visión del sistema de detección, y medir la diferencia en la posición de estos. puntos en las dos imágenes. Esta diferencia se llama disparidad y se mide en el número de píxeles.
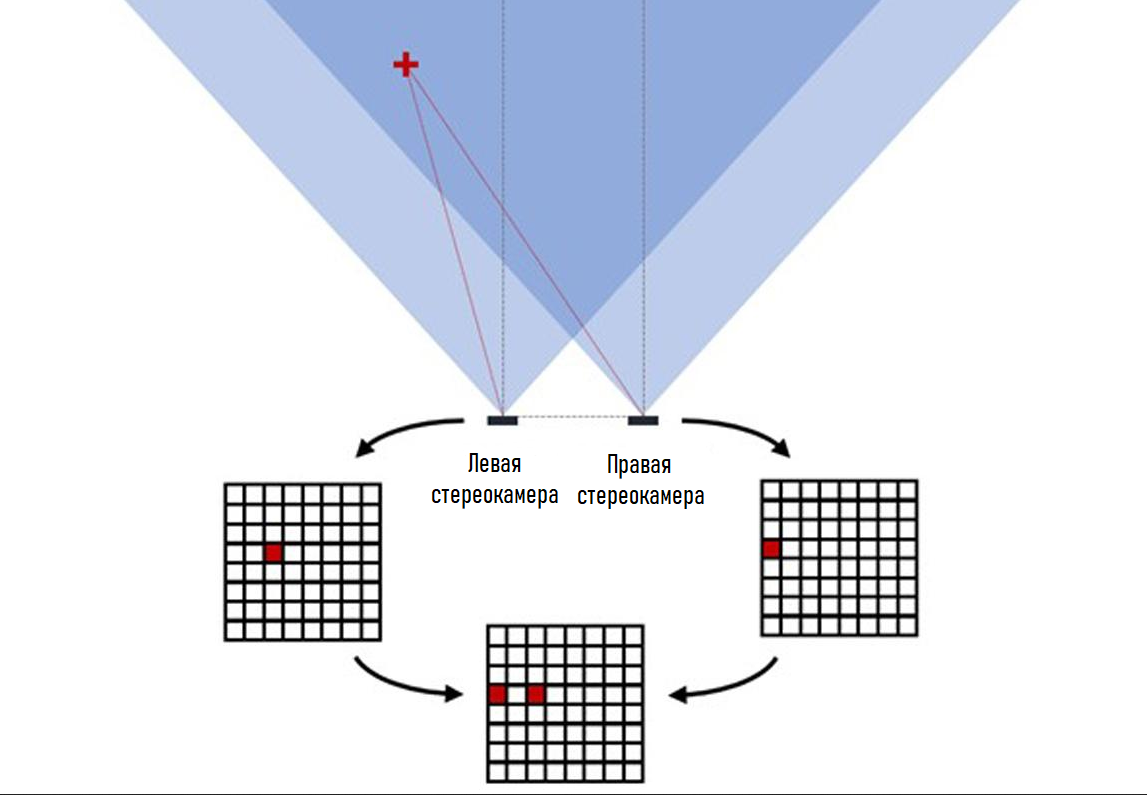 Ilustración del principio de visión estéreo: el punto rojo 3D está en diferentes posiciones en las imágenes izquierda y derecha.
Ilustración del principio de visión estéreo: el punto rojo 3D está en diferentes posiciones en las imágenes izquierda y derecha.
La disparidad se puede relacionar con la profundidad de cada uno de estos puntos utilizando la siguiente relación profundidad = focal * línea de base / disparidad, donde la profundidad y la línea de base se expresan en las mismas unidades, y la la longitud y la disparidad se expresan en número de píxeles.
El resultado del cálculo toma la forma de un mapa de profundidad de 176 × 90 píxeles, para el cual el valor de cada píxel corresponde a la profundidad en metros. El mapa de profundidad se actualiza a 30 Hz.
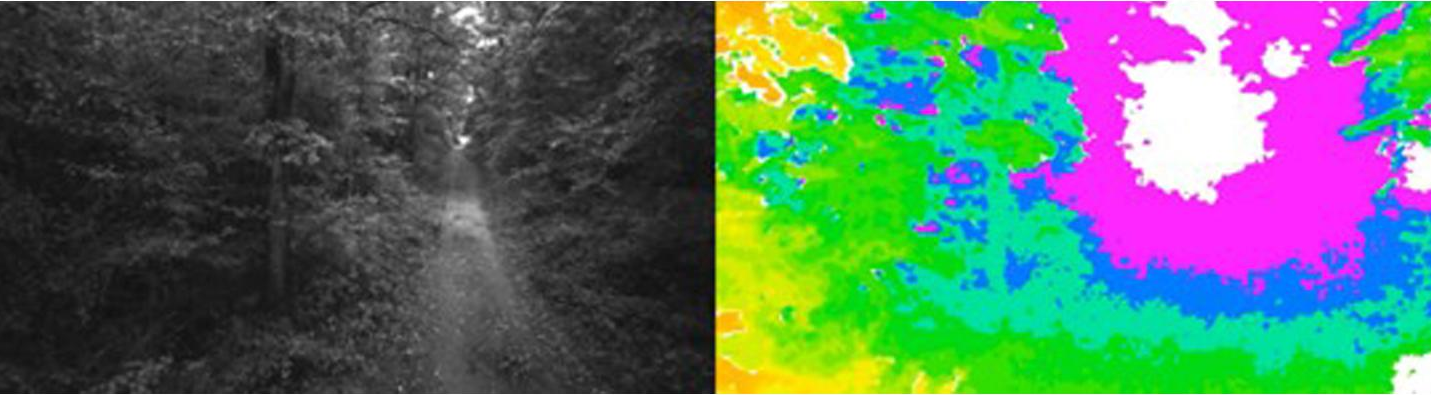
Un ejemplo de una imagen capturada por la cámara derecha del sistema de detección ANAFI Ai (izquierda) y la profundidad correspondiente obtenida usando imágenes estéreo (derecha). El mapa de colores va del rojo (más cerca) al morado (más lejos); el blanco significa Fuera de alcance.
El resultado inmediato de esto es que la profundidad medida por este método se discretiza, ya que la disparidad solo puede tomar valores discretos (número de píxeles). Un punto 3D ubicado lo suficientemente lejos del sistema de percepción y que crea una disparidad teórica menor a un píxel se considerará infinito, ya que la disparidad discreta real correspondiente será igual a 0. La precisión del método de comparación estéreo disminuye al aumentar la distancia, aunque existe son métodos que pueden reducir este fenómeno logrando un muestreo de subpíxeles.
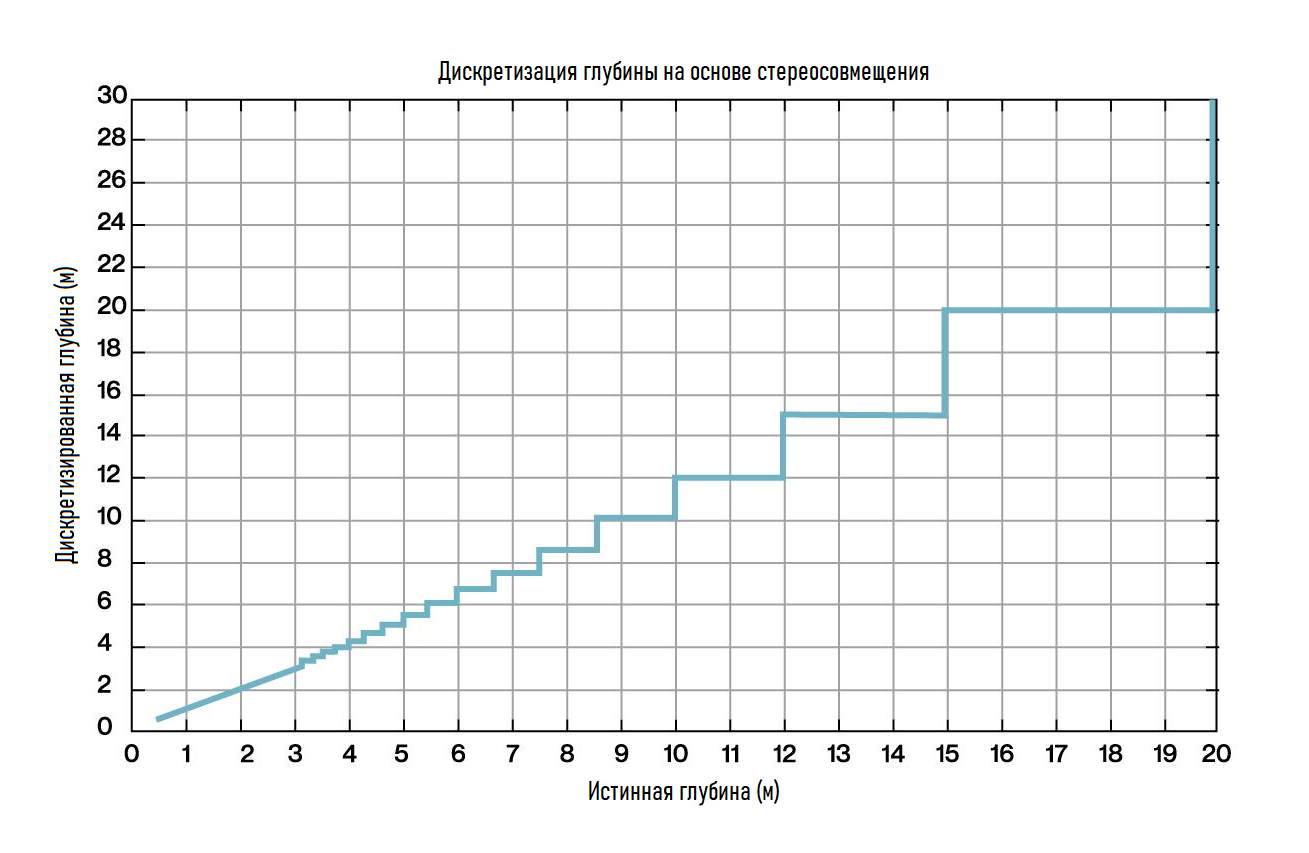 Profundidad discretizada medida por "alineación estéreo" versus "profundidad real".
Profundidad discretizada medida por "alineación estéreo" versus "profundidad real".
Además, la disparidad diverge a medida que la profundidad se acerca a cero. Dado que el número de píxeles en las imágenes es limitado, el valor de disparidad también lo es. Como consecuencia, existe una profundidad mínima a la que el sistema perceptivo es ciego. Esta profundidad mínima es de 36 cm para ANAFI Ai.
Acerca de la calibración: Cada par de cámaras estéreo se calibra de fábrica para medir con precisión las pequeñas discrepancias que pueden existir entre las dos cámaras y compensarlas en los cálculos de profundidad integrados.
El usuario también puede recalibrar un par de cámaras estéreo utilizando el patrón de prueba suministrado con el dron. En particular, hasta cierto punto, el dron es capaz de detectar posibles errores de calibración que puedan surgir durante su vida. En este caso, el software de la aeronave intentará ajustarlos y compensarlos, y si esto falla, aparecerá una notificación pidiéndole que vuelva a calibrar.
Profundidad del movimiento
El movimiento del dron también se puede utilizar para recopilar imágenes del entorno desde diferentes ángulos y así reconstruir información de profundidad. Esta técnica se llama profundidad a partir del movimiento, o detección monocular, porque una sola cámara en movimiento es suficiente para recopilar información de profundidad.
El principio de funcionamiento es similar al de la visión estéreo, pero en lugar de comparar imágenes del entorno obtenidas por diferentes observadores al mismo tiempo, la percepción compara imágenes del entorno obtenidas por el mismo observador en diferentes momentos. Si el dron se está moviendo, las imágenes de este observador único se capturarán desde diferentes ángulos. Conociendo la posición en la que se tomó cada fotograma, es posible triangular los puntos correspondientes a la misma característica en diferentes imágenes y devolverlos a 3D.
La salida es una nube de puntos tridimensional que contiene hasta 500 puntos para ANAFI Ai, generada a una frecuencia de 10 Hz.
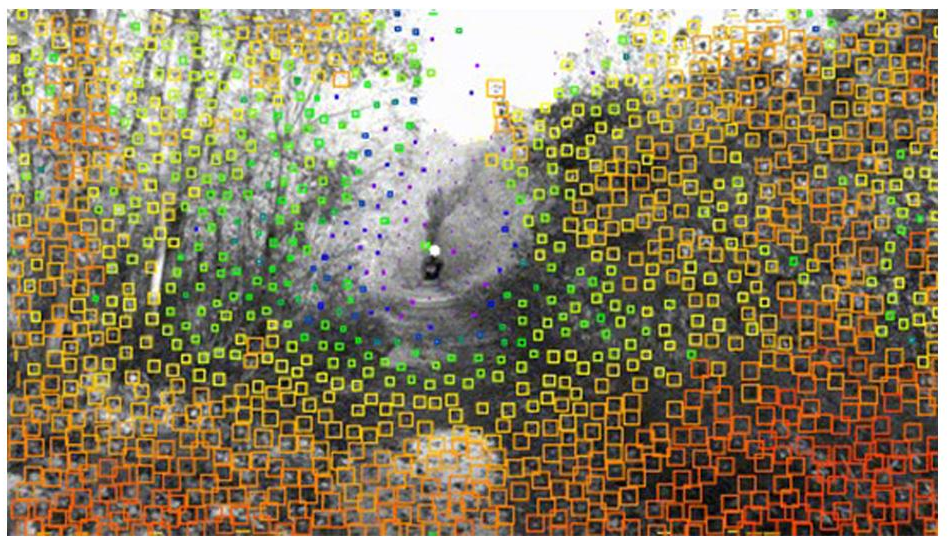 Un ejemplo de una nube de puntos creada en base a la profundidad del movimiento: el mapa de color va del rojo (más cerca) al púrpura (más lejos).
Un ejemplo de una nube de puntos creada en base a la profundidad del movimiento: el mapa de color va del rojo (más cerca) al púrpura (más lejos).
El algoritmo ANAFI Ai Motion Depth generalmente genera menos información (nube de puntos dispersos) que el algoritmo de coincidencia estéreo y requiere que el dron se mueva para recopilar información. Además, este algoritmo no puede extraer información en la dirección exacta del movimiento (al menos para transmisiones en vivo), ya que los objetos en las imágenes aparecen casi estacionarios en esta dirección (enfoque de expansión).
Sin embargo, tiene un mejor rango de detección (rango teóricamente infinito) que el emparejamiento estéreo.
Fill Grid
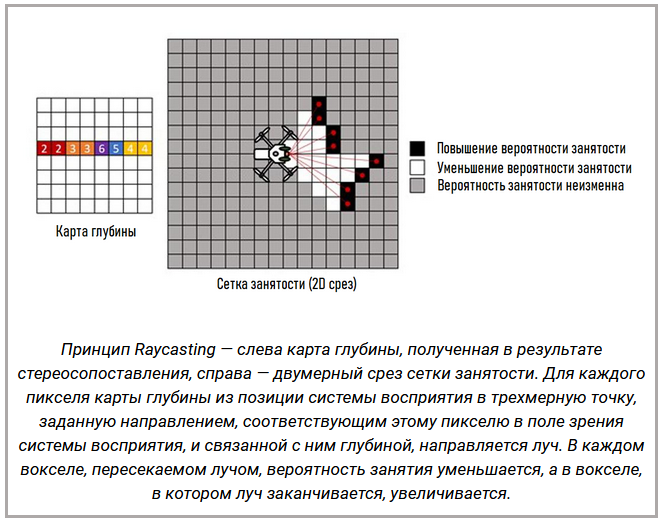
La información de profundidad de los algoritmos de detección estéreo y monocular está integrada en Fill Grid. Esta malla muestra el entorno 3D en cubos 3D llamados vóxeles. A cada vóxel se le asigna la probabilidad de estar ocupado por un obstáculo o, por el contrario, estar libre de un obstáculo.
Se utiliza un algoritmo de transmisión de rayos para integrar información de profundidad en una cuadrícula de relleno. Para cada píxel del mapa de profundidad obtenido como resultado de la comparación estéreo, se convierte en un punto tridimensional, y para cada punto de la nube de puntos, en la profundidad obtenida como resultado del movimiento:
- Se dibuja un rayo en la cuadrícula de relleno desde la posición del sistema de percepción hasta la posición del punto 3D.
- La probabilidad de que un vóxel que contenga un punto 3D esté ocupado aumenta.
- Se reduce la probabilidad de que todos los vóxeles atravesados por un rayo distinto del que contiene el punto 3D estén ocupados.
Así, la cuadrícula actúa como un filtro de tiempo para la información de profundidad, absorbiendo cualquier ruido potencial en la medición de profundidad, y como memoria de las mediciones anteriores, lo que permite para navegar en entornos difíciles incluso en ausencia de un campo de visión continuo de 360 ° del sistema de percepción.
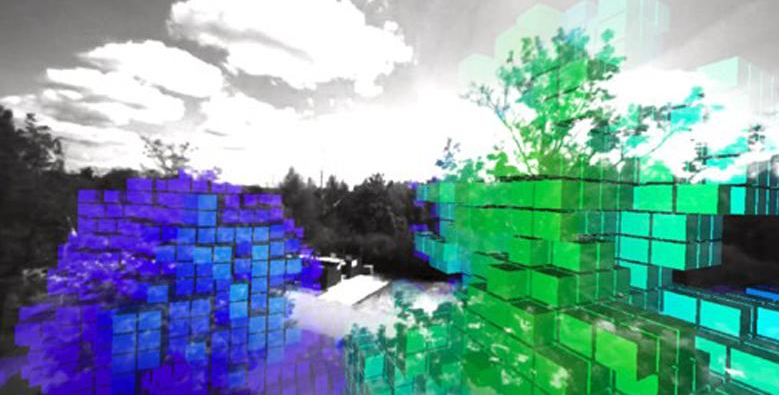 Un ejemplo de una cuadrícula de relleno. Los vóxeles se superponen en la vista de la cámara estéreo derecha con un alto grado de certeza de que están ocupados, desde el rojo (Cerca) hasta el púrpura (Lejano).
Un ejemplo de una cuadrícula de relleno. Los vóxeles se superponen en la vista de la cámara estéreo derecha con un alto grado de certeza de que están ocupados, desde el rojo (Cerca) hasta el púrpura (Lejano).
La cuadrícula de relleno es la base de los algoritmos de planificación de movimiento utilizados por ANAFI Ai para el vuelo autónomo y la evitación de obstáculos.
Evitación de obstáculos
Gracias al conocimiento del entorno 3D del dron almacenado en la cuadrícula de relleno, ANAFI Ai puede evitar obstáculos. Esto proporciona una seguridad adicional significativa para las misiones autónomas, pero también es útil para el vuelo manual, especialmente si la línea de visión entre el piloto y el dron se ve afectada.
Cada 30 ms ANAFI Ai predice cuál será el horizonte temporal corto nominal en el futuro. Esta predicción se infiere de los enlaces enviados por el usuario, ya sean comandos de vuelo del control remoto, puntos de ruta para adjuntar a un plan de vuelo o una trayectoria de entrada. Luego, utilizando el modelo de dron interno simulado, el algoritmo de reprogramación calcula las correcciones más pequeñas posibles a esta trayectoria nominal predicha que la hacen libre de colisiones y factible para el dron.
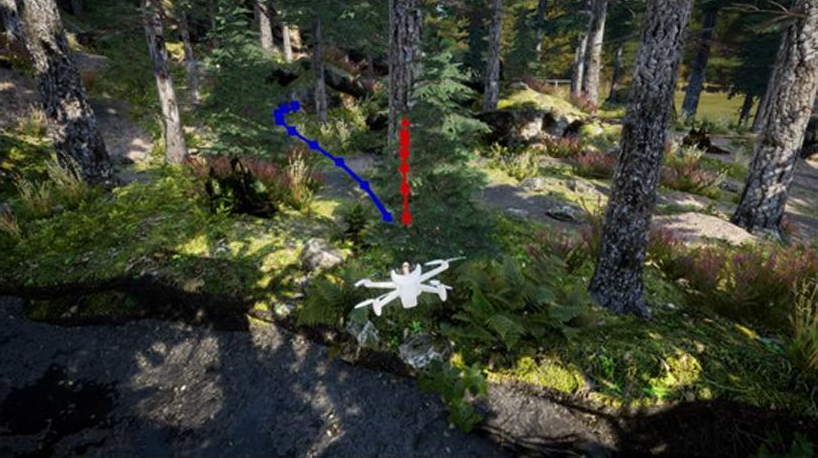 Un ejemplo de la trayectoria corregida calculada por el algoritmo de evitación de obstáculos en respuesta a la colisión de la trayectoria de referencia con un árbol.
Un ejemplo de la trayectoria corregida calculada por el algoritmo de evitación de obstáculos en respuesta a la colisión de la trayectoria de referencia con un árbol.
El sistema de evasión de obstáculos ANAFI Ai ha sido diseñado para operar a velocidades de hasta:
- Vuelo nivelado: 29 km / h
- Ascenso: 14 km / h
- Descenso: 11 km / h
El rendimiento de evitación está limitado en caso de lluvia o viento fuerte, poca luz o navegación por satélite interrumpida. Además, antes de volar, debe asegurarse de que las lentes del sistema de detección estén limpias.
Misiones de vuelo

Características principales
Aire SDK (ver. Sección SDK) permite a los desarrolladores acceder a todos los sensores, cámaras, interfaces de conectividad y funciones independientes de los drones. Por lo tanto, pueden personalizar el comportamiento del dron para crear misiones de vuelo. Cada misión de vuelo contiene un conjunto de comportamientos o modos básicos:
- En tierra: Comportamiento cuando los motores están detenidos, por ejemplo, calibración del sensor.
- Despegue: varias estrategias de despegue
- Hover: mantener un punto fijo
- Vuelo: manual funciones y vuelo autónomo
- Aterrizaje: varias estrategias de aterrizaje
- Crítico: ante la detección de un estado crítico
Las misiones de vuelo personalizadas pueden crear nuevos comportamientos o reutilizarlos de la misión predeterminada.
Precio y disponibilidad
El inicio de las ventas del dron ANAFI Ai está previsto para septiembre de 2021. La información de precios no ha sido revelada por el momento. Continuamos monitoreando la información entrante y definitivamente actualizaremos esta sección en una fecha posterior.

Documentación para descargar
Documentación para familiarizarse con el producto del desarrollador:
- Descargar la documentación técnica completa del desarrollador
- Descargar la especificación del producto del desarrollador
Vídeos
Reseñas principales ANAFI Ai del desarrollador y usuarios
Desembalaje y primer vuelo.
Vuelo de prueba del dron a distancia con conexión 4G. El tiempo total de vuelo fue de 29 minutos a una velocidad de vuelo horizontal promedio de 58 km / h (16 m / s). Durante este tiempo, el dron pudo cubrir 27 km. También se puede notar que el vuelo se realizó en condiciones de fuerte viento, lo cual fue constantemente advertido por el sistema de drones.
.






