
- 1 Uvod
- 2 Razvijalec o stroju
- 3 Lastnosti
- 4 Paket vsebina
- 5 Specifikacija
- 5.1 Dron
- 5.2 Komunikacija
- 5.3 Navigacijski sistem
- 5.4 Skycontroller 4
- 5.5 Inteligentna baterija letala
- ) 5.6 Aplikacija
- 5.7 Kamera
- 5.8 Avtonomni načini letenja
- 5.9 Kibernetska varnost
- 5.10 Papiga SDK
- 6 Videz
- 7 Sporočilo
- 7,1 4G
- 7,2 Maks. doseg s povezavo 4G
- 7,3 Wi-Fi
- 7,4 Video v živo
- 8 Kamera
- 8,1 48 MP matrika
- 8,2 Objektiv
- 8,3 Video načini
- 8.4 Video kodiranje
- 8,5 HDR
- 8,6 Načini fotografiranja
- 9 Hibridna stabilizacija
- 9.1 Gimbal glavne kamere
- 10 Fotogrametrija
- 10.1 Pregled in kartografija
- 10.2 Zmožnosti AI in 4G
- 10.3 Avtonomni let
- 11 Fotogrametrija ali lidar
- 11.1 Prednosti fotogrametrije
- 11.2 Slabosti LIDAR -a
- 12 SDK
- 12,1 SDK za zrak
- 12,2 SDK za tla
- 12,3 OpenFlight
- 12,4 Sfinga
- 12.5 Olympe
- 12,6 PdrAW
- 12,7 Modeli C. A. D.
- 12,8 Združljivost MAVLink in GUTMA
- 13 Največji partnerski ekosistem za brezpilotne letalnike Parrot
- 13,1 Papiga za vse poslovne potrebe
- 14 Kibernetska varnost
- 14,1 Zasebnost podatkov
- 14,2 Skladno s FIPS140 -2 in potrjeno s CC EAL5 Secure Element
- 14.3 4G varna povezava in močna avtentikacija
- 14.4 varna inicializacija in nadgradnja
- 14.5 Nastavitev uporabniških ključev na varnem elementu
- 14.6 Digitalno podpisane fotografije
- 14.7 Preglednost in neprekinjeno preverjanje varnosti z dodelitvijo napak
- 15 Upravljanje podatkov
- 15.1 Zbrani podatki
- 15.2 Končna uporaba zbranih podatkov [1 26]
- 15.3 Izboljšanje umetne inteligence (AI)
- 16 Značilnosti letenja
- 16.1 Aerodinamične lastnosti
- 16.2 Pogoni in aerodinamika
- 16.3 Senzorji
- 16.4 Značilnosti senzorja
- 16,5 Avtopilot
- 17 Avtonomni let
- 17,1 Ključne značilnosti
- 17.2 Strategija sistema zaznavanja
- 17.3 Senzorji
- 17.4 Dvojno vzmetenje
- 17.5 Obnova okolja
- 18 Letalske misije
- 18.1 Ključne lastnosti
- 19 Cena in razpoložljivost
- 20 Prenesite dokumentacijo
- 21 Video posnetki
Uvod [16 4]
Parrot Anafi Ai je popolnoma nova edinstvena rešitev znanega francoskega razvijalcakomercialni uporabi
Klicna kartica Anafi Ai je vgrajen modul 4G, zahvaljujoč kateremu je brezpilotni letalnik lahko uporabil četrto generacijo mobilnih komunikacij kot glavni kanal za prenos podatkov med brezpilotnim letalom in nadzorno opremo, ki dejansko odstrani vse omejitve na dosegu leta in vnaprej določa delovanje brezpilotnega letala zunaj vidnega polja. Če pogledamo naprej, ugotavljamo, da se je izkazani potencial stroja izkazal za neverjetno močnega in bolj kot kdaj koli ustreza njegovemu futurističnemu izgledu, ki ga je narava navdihnila za ustvarjanje francoskih inženirjev.
Razvijalec o avtomobilu
Martin Liné, direktor trženja pri Parrotbrezpilotni letali Parrot

Lastnosti
Ključne značilnosti papige Anafi Ai:
- Teža 898 gramov
- Čas letenja 60 sekund
- Edinstvena prenosna zložljiva oblika
- Vgrajen komunikacijski modul 4G za popolno interakcijo med brezpilotnimi letali in nadzorno opremo brez omejitev v vseh okoljskih pogojih
- ) Združljiv z LTE po vsem svetu
- Opremljen s sistemom za vsesmerni prenos signala (4 usmerjene antene z reflektorjem (z ojačanjem: 2,5 dBi / s antene). Dron določi najboljši par anten, odvisno od njegove orientacije in položaja glede na položaj pilota)
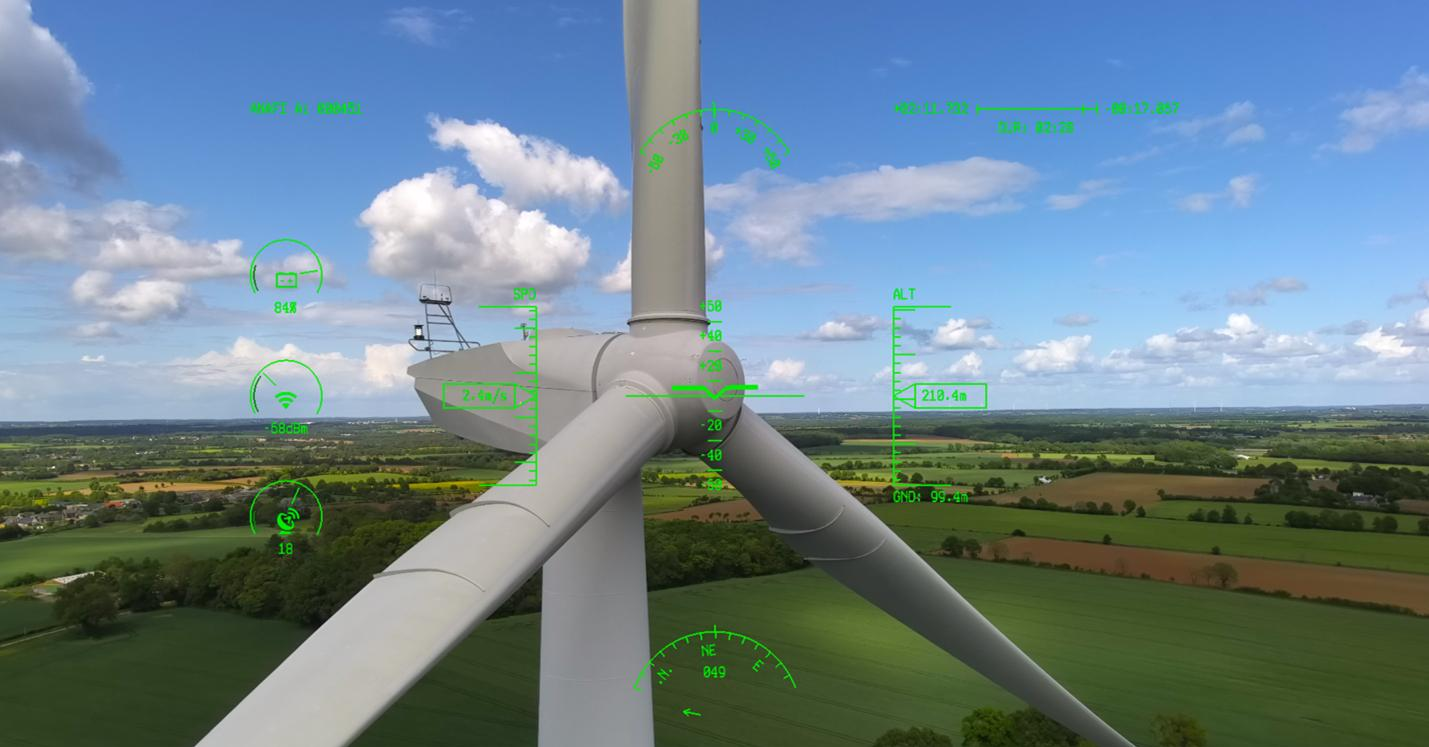
- Opremljen z edinstvenim vsesmernim sistemom slikanja okoliškega sveta, zgrajenim na paru stereoskopskih kamer, nameščenih na specializiranem gimbalu s 330 -stopinjskim razponom pomika (od -120 ° do 210 °), delo v tandemu z inteligentnim sistemom optimizacije. poti letenja
- Prilagojeno za letenje v zaprtih prostorih
- Pretakanje videa v živo v 1080p z nizko zakasnitvijo (300 m / s) brez omejitev dosega kjer koli na svetu, z bitno hitrostjo video zapisa 12 Mbps
- Sposobnost prenosa datotek v shranjevanje v oblaku neposredno med letom
- Vgrajen komunikacijski modul Wi-Fi (Wi-Fi 802.11a / b / g / n) za popoln nadzor interakcije med brezpilotnimi letali in opremo (kot alternativna možnost povezave)
- Slave. Frekvenčno območje Wi-Fi: 2,4 GHz / 5,8 GHz
- Maks. doseg letenja FPV prek Wi-Fi: 9 km
- Edinstven samodejni način delovanja modulov 4G / Wi-Fi, ki na podlagi preobremenjenosti omrežja omogoča nemoteno preklapljanje iz ene komunikacijske tehnologije v drugo brez izgube podatkov
- Zaščitni razred brezpilotnih letal IPX3
- Maks. čas letenja 32 min
- Maks. vodoravna hitrost letenja 61 km / h
- Maks. odpornost proti vetru: 13 m / s
- Maks.strop nad morsko gladino 5000 m
- 48MP 4K kamera, zgrajena na 1/2-palčni matriki CMOS z velikostjo slikovnih pik 0,8 μm; z vgrajenim nizom barvnih filtrov Bayer
- Optični objektiv LD-ASPH
- Hibridni 6-osni sistem za stabilizacijo slike (3-osni mehanski 3-osni digitalni EIS)
- Nadzor delovno območje Gimbal -90 ° do 90 °
- 6 -kratni digitalni zoom brez izgube (2x 4K / 4x FHD)
- Maks. bitna hitrost videa 200 Mbps
- Formati snemanja videa HDR8 / HDR10
- Maks. dinamični razpon 14EV
- Barvni profil P-log za naknadno obdelavo
- 5-kratni samodejni način letenja in snemanja (fotogrametrija / načrt leta / snemalec / Smart RTH / vozilo)
- Vgrajene reže za kartice MicroSD in SIM
- Združljivo s programsko opremo PIX4D Suite
- Fotografmetrični načini letenja so na voljo v mob. Aplikacija FreeFlight 7 in programska oprema OpenFlight
- Ustvarjanje načrta leta z enim klikom
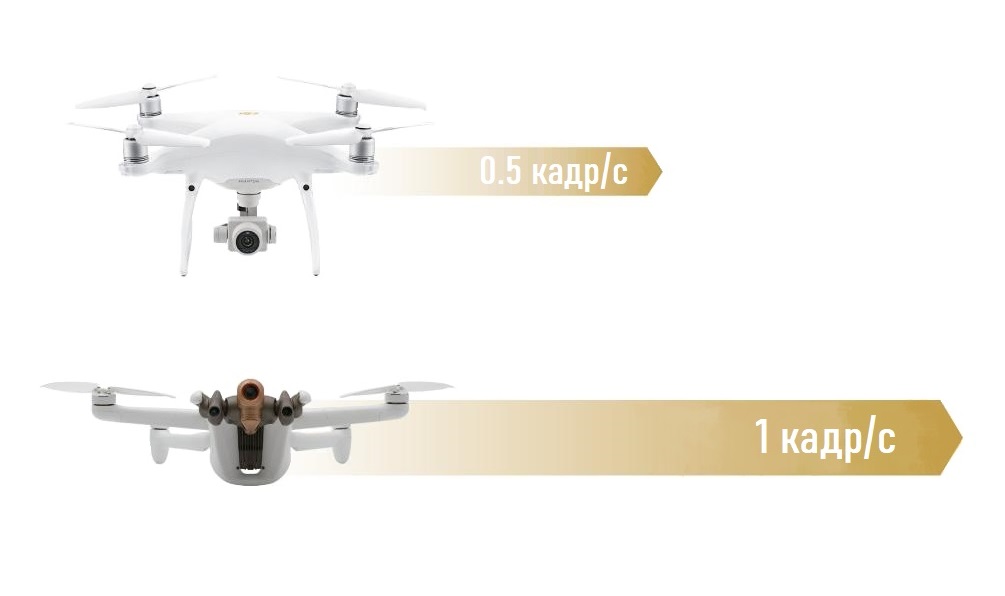
- Fotogrametrična fotogrametrija s 48 MP 1 sličico na sekundo: dvakrat hitrejša od konkurentov
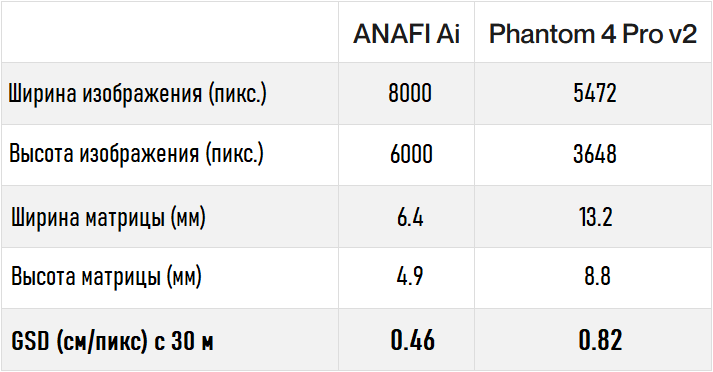
- Natančnost fotografiranja: 0,46 cm / piks. GSD na 30 m
- Podpora za Parrot SDK (z možnostjo vdelave kode v brezpilotni letalnik z uporabo SDK Air, ustvarjanje mobilnih aplikacij z uporabo zemeljskega SDK, konfiguriranje odprtokodne zemeljske postaje z OpenFlight, interakcija s sodobno Sfingo orodje za simulacijo brezpilotnih letal, kot tudi Python skriptiranje z Olympe ter obdelava videa in metapodatkov s PdrAW)
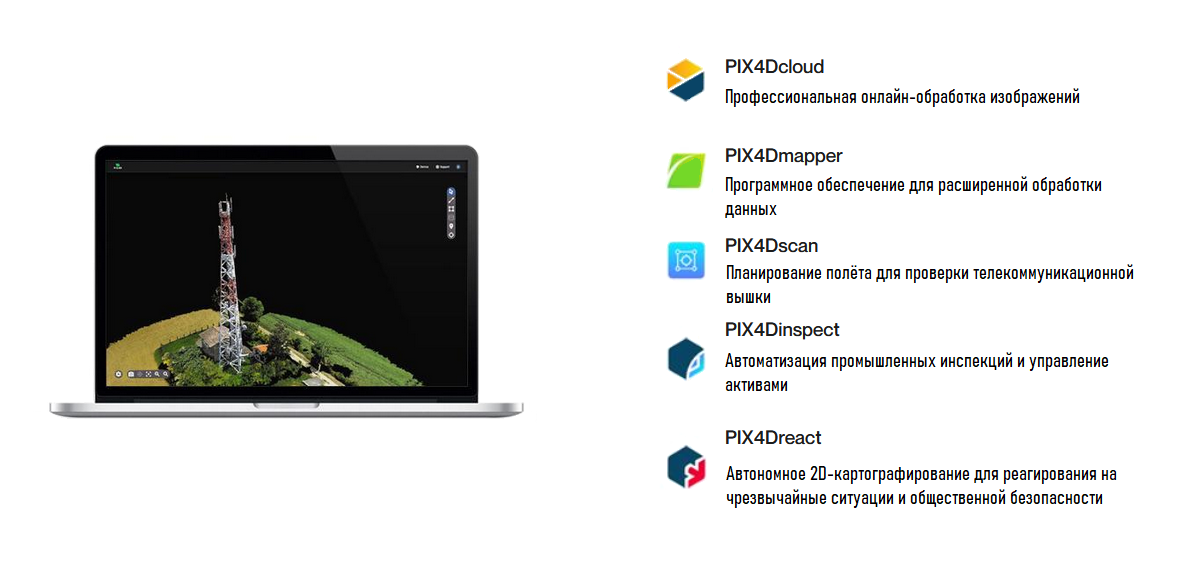
- Združljivo s programsko opremo drugih izdelovalcev: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- Splošno ANAFI Predpisi Uredba Evropske unije o varstvu podatkov (GDPR)
- Vrhunska zasebnost podatkov z vgrajenim NIST FIPS140-2 3. stopnja varnega elementa WISeKey s skupnimi merili s certifikatom EAL5
- Video in upravljalniki so zaščiteni s SRTP / DTLS v skladu z na webRTC
- Nova prenosna krmilna oprema Parrot Skyco ntroller 4
- Nova mobilna aplikacija Parrot FreeFlight 7

Paket
Razvijalec ponuja dron v eni konfiguraciji, ki bo vključevala:
- Drone ANAFI Ai
- Togo transportno ohišje
- Nadzorna oprema Parrot Skycontroller 4
- 1 × Smart baterija
- Polnilnik USB-PD
- Komplet nadomestnih propelerjev (2CW / 2CCW)
- Spremljevalni kabel (USB-C do strele)
- 2 × spremljevalni kabli (USB -C do USB -C)
- Umeritvena tabela

Specifikacije
) Letala

Komunikacija
Navigacijski sistem
Skycontroller 4

Letalska inteligentna baterija
Aplikacija

)Kamera

) Avtonomni načini letenja
Kibernetska varnost
Parrot SDK
Nato morate se lahko seznanite s ključnimi informacijami Parrot Anafi Ai, ki vam bodo omogočile, da izvedete več o prijavljenem potencialu stroja, pa tudi o tem, katere izboljšave so bile izvedene v primerjavi s komercialno različico brezpilotnega letala Parrot Anfi Termalni in drugi droni vodilnih blagovnih znamk.
Videz





Komunikacija
4G
ANAFI Ai vključuje 4G radijski modul (poleg radijski modul Wi-Fi), ki vam omogoča oddajanje videotoka v kakovosti 1080p z največjo bitno hitrostjo 12 Mbps, z zelo nizko zakasnitvijo (300 ms), brez omejitev v dosegu in kjer koli na svetu.
Združljivost
Modul ANAFI Ai 4G podpira več kot 28 frekvenčnih pasov, ki pokrivajo več kot 98% frekvenc, razporejenih po vsem svetu.
Samodejno omrežno stikalo
Kakovost in pasovna širina omrežij 4G in Wi-Fi se merita vsakih 100 ms, da se tok prilagodi omrežnim razmeram. V kombinaciji z usmerjevalnimi algoritmi se povezava med brezpilotnim letalom in njegovim krmilnikom ohrani tudi, če je Wi-Fi močno moten. Ko bo efektivna pasovna širina (uporabna pasovna širina) Wi-Fi pod 1,5 Mbps, bo sistem samodejno preklopil na 4G.
Za omejitev porabe mobilnih podatkov, ko je pilot v dosegu brezžičnega omrežja Wi-Fi, se tudi prehod iz 4G v Wi-Fi izvede samodejno brez prekinitve videotoka.
Maks. doseg s povezavo 4G
Videoposnetek razvijalca prikazuje maks. doseg leta Anafi Ai s povezavo 4G v eno smer z enim polnjenjem baterije. Skupni čas letenja je bil 29 minut pri povprečni horizontalni hitrosti leta 58 km / h (16 m / s). V tem času je brezpilotni letnik uspel premagati 27 km. Opazite lahko tudi, da je let potekal v razmerah močnega vetra, na kar je sistem brezpilotnih letal stalno opozarjal.
Izvedeni algoritmi za optimizacijo videotoka
Nadzor prezasedenosti 4G
Algoritem za nadzor zastojev omogoča:
- Izmeri izgubo paketov v celotnem omrežnem ciklu.
- Zakasnitev merjenja (čas povratnega potovanja).
- Pasovno širino prilagodite glede na ta dva parametra.
Končni cilj algoritma je povečati razpoložljivo pasovno širino ob ohranjanju najmanjše možne zakasnitve. Ta algoritem je implementiran na vsakem vmesniku, ki je na voljo v dronu, vsak s svojimi parametri, optimiziranimi glede na omrežje. Na podlagi informacij, ki jih ponuja ta algoritem, upravitelj povezav sprejema odločitve o usmerjanju in aktivnem vmesniku.
Upravljanje drona prek povezave 4G
ANAFI Ai se poveže z daljinskim upravljalnikom prek 4G v manj kot 30 sekundah, če je dron izven dosega Wi-Fi in v manj kot 15 sekundah če je dron v dosegu Wi-Fi. Povezava 4G omogoča tudi:
- Zaznavanje in vzpostavitev povezave na podlagi protokola VOIP SIP.
- Uporabite relejni strežnik za vzpostavitev povezav prek varnih omrežij.
Zmogljivost videotoka
- Zakasnitev: 300 ms.
- Varnost: video in kontrole so zaščitene s SRTP / DTLS v skladu z webRTC.
- Antene: 28 pasov LTE od 700 MHz do 2,6 GHz.

Wi-Fi
Vsesmerni prenosni sistem
- ANAFI Ai ima 4 usmerjene reflektorske antene (z ojačitvijo antene: 2,5 dBi / s). Dron določi najboljši par anten na podlagi njegove orientacije in položaja glede na položaj pilota.
- Z rekombiniranim dobičkom 3,5 / - 1,5 dBi v vodoravni ravnini brezpilotnega zrakoplova je dobiček ANAFI Ai RF zelo enakomeren.
- Sevanje antene navzdol je bilo izboljšano za 4 dB v primerjavi z ANAFI.
Zunanja zasnova radia velike moči
Sprednji del radia poveča moč na dnu antene z zelo dobro linearnostjo in občutljivost (-94 dBm pri 6,5 Mbps) za dosego največje omejevalne moči FCC.

Zanesljivost Wi-Fi
802,11 parametri
nizka pasovna širina, nizka zakasnitev, spremenljivost ravni sprejema zaradi hitrosti dron, dolgi doseg, prisotnost motenj. Ti parametri vključujejo združevanje, štetje ponovnih poskusov, tehnologijo MiMo (STBC), hitrost prenosa podatkov nadzornega okvirja in pogoje prekinitve povezave.
Inteligentno preprečevanje motenj
ANAFI Ai ima algoritem za brisanje kanala (2,4 GHz in 5 GHz dvojni pas) v primeru motenj.
Prilagajanje in spremljanje pretoka
ANAFI Ai stalno spremlja stanje svoje povezave s 4 Hz in lahko zazna motnje. To vam omogoča dinamično optimizacijo pasovne širine in velikosti poslanih paketov. Pilota tudi opozori, če je v posebej motečem okolju ali bo kmalu izgubil signal.
Zmanjšanje pasovne širine
Na meji svojega območja in če razmere to dopuščajo, lahko ANAFI Ai preklopi na pasovno širino 10 MHz, da izboljša svojo občutljivost za 3 dB in poveča obseg za 40%.

Indikatorji radia
Video oddajanje
Kazalniki video povezav
Implementirani algoritmi za optimizacijo videotoka
Parrot Gen4 Streaming (4. generacija)
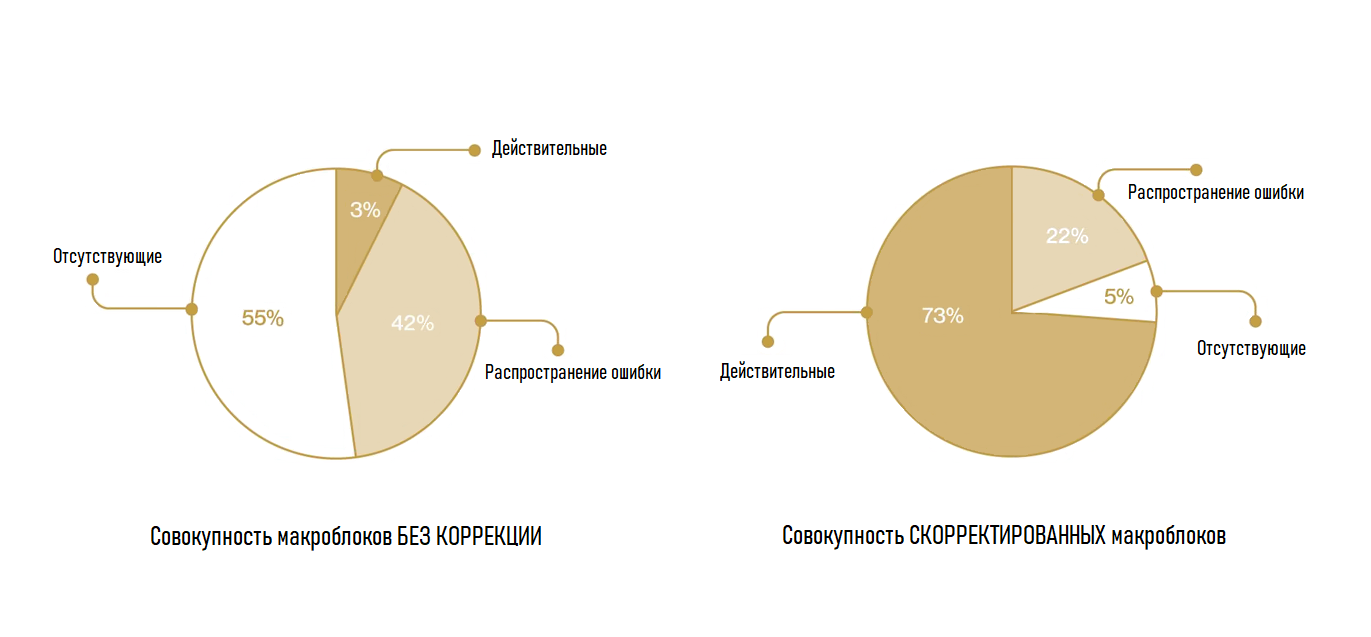
Ta algoritem zmanjšuje vizualni vpliv izgube omrežja in zagotavlja interoperabilnost vsi dekoderji, hkrati pa zagotavljajo skladenjsko popoln tok: manjkajoči deli slike se rekonstruirajo kot manjkajoči deli, enaki tistim na referenčni sliki.
Tako so napake na tistih področjih, ki so nagnjena k izgubi, in ne veljajo za celotno sliko.
Spodnji grafi prikazujejo stopnjo uspešnosti dekodiranja makrobloka pri 5% izgubi omrežja - z ali brez izboljšanih funkcij pretakanja ANAFI Ai. Algoritem zagotavlja pravilno dekodiranje 75% makroblokov. Uporabniku omogočajo, da nadaljuje svoje poslanstvo, ne da bi zamrznil zaslon ali izgubil pretakanje.
Nadzor prezasedenosti
Algoritem ovrednoti tudi Wi-Fi in radijsko okolje za predvidevanje in izogibanje izgubi paketov in preobremenitvi omrežja, kar pomaga zmanjšati zamude. Algoritem temelji na oceni zmogljivosti kanala, izračunani na podlagi podatkovne hitrosti in stopnje napak na fizični plasti; potem vpliva na parametre kodiranja in enkapsulacije omrežja.
Metapodatki
Metapodatki se prenašajo z videotokom. Vsebujejo zlasti telemetrijske elemente brezpilotnih letal (položaj, nadmorska višina, hitrost, raven baterije itd.) In video metrike (kot kamere, vrednost osvetlitve, vidno polje itd.).
Sinhronizacija slik in odprtih metapodatkov opravlja funkcije natančnega pozicioniranja na zemljevidu, sledenja letalskim instrumentom v HUD ali omogočanja elementov razširjene resničnosti.
Metapodatki so vključeni z uporabo standardnih metod (razširitev glave RTP); Podatkovna oblika, ki jo je določil Parrot, je odprtokodna: na voljo je v ANAFI Ai SDK.
Kamera

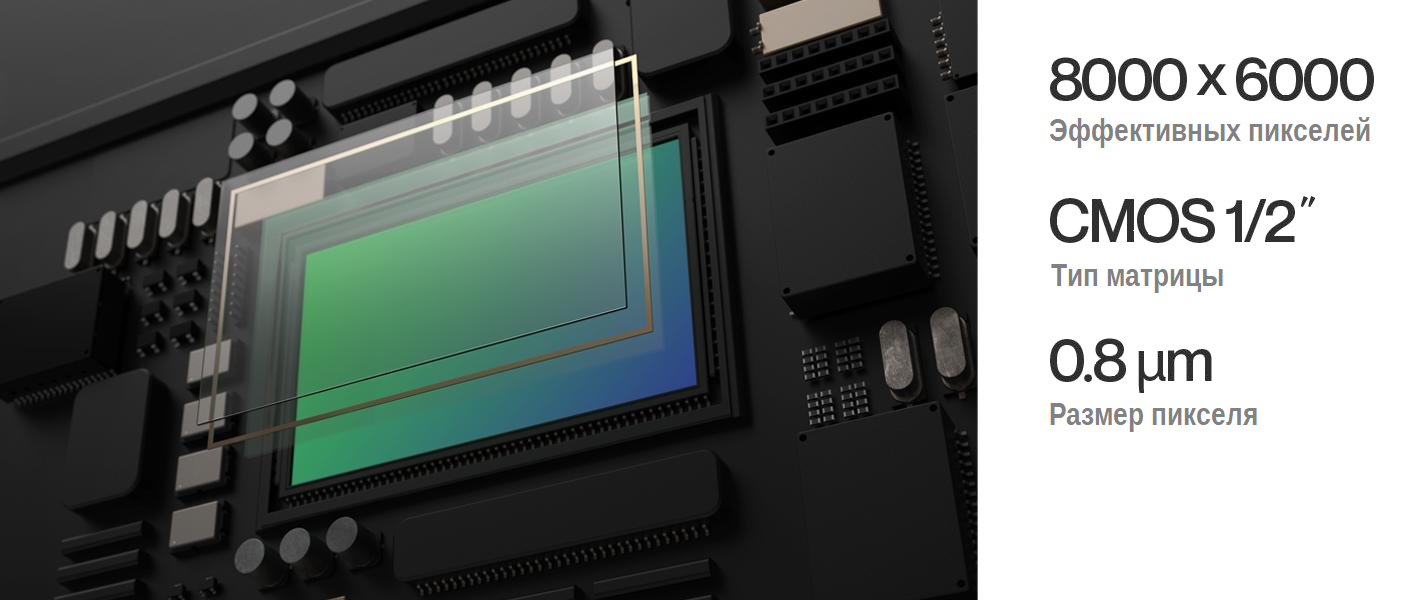
48MP senzor
ANAFI Ai matrika vključuje veliko število megapikslov za podrobno fotografiranje iz zraka.
Uporablja tehnologijo matrike barvnih filtrov Quad Bayer, kjer imajo skupine 4 sosednjih pik enako barvo. Tako je zajem HDR v realnem času mogoče doseči v foto in video načinu z dodajanjem signalov iz štirih sosednjih slikovnih pik.
Njegov dinamični razpon je 4 -krat večji od standardnih Bayerjevih matric. Tudi zapletene prizore je mogoče posneti z minimalnimi osvetlitvami ali podrobnostmi v senci.
Objektiv
Objektiv ANAFI Ai je bil posebej razvit za Parrot. Združuje 6 asferičnih elementov in je optimiziran za zmanjšanje optičnega odseva. Ta objektiv daje 68 ° HFoV v standardnem video načinu in 64,6 ° HFoV v standardnem načinu fotografiranja.

Video načini
ANAFI Ai zajema nemoten 4K video pri 60 sličicah na sekundo, vključno s P-Log, in glejte tudi HDR10 4K video s hitrostjo do 30 sličic na sekundo. Spodnja tabela prikazuje vse video načine ANAFI Ai.

Video kodiranje
Uporabniki lahko izbirajo med H.264 (AVC) in H.265 (HEVC).
Vse ločljivosti uporabljajo naslednje formate slikovnih pik:
- YUV420p (8-bpc barvni prostor BT.709) za standardni način in HDR8.
- YUVJ420p (8 bitov / komponento, celoten obseg - barvni prostor BT.709) za slog P -log.
- YUV420p10 (10 kosov BT.2020 barvnega prostora) za snemanje HDR10, samo H.265.
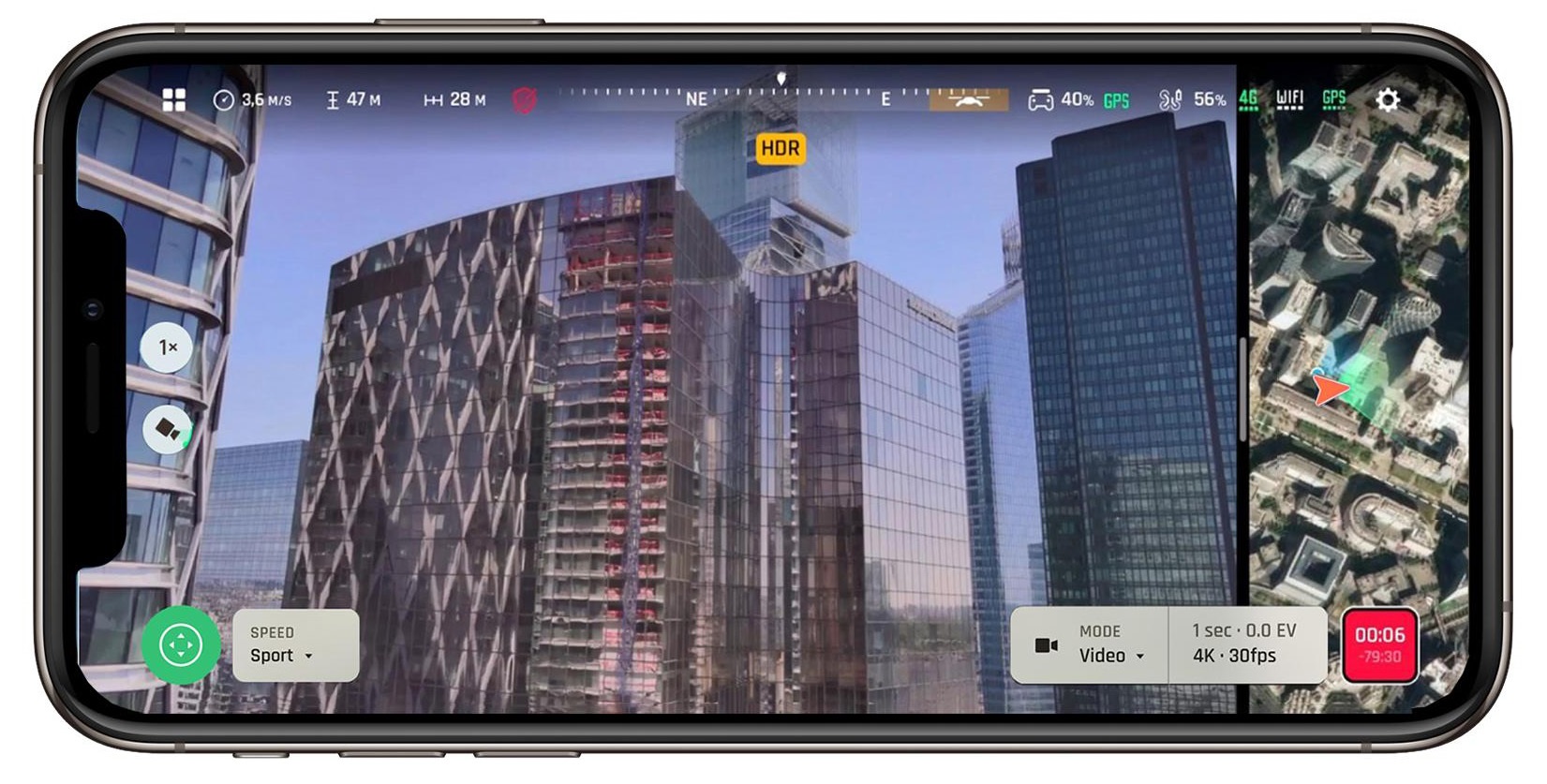
HDR
Pri snemanju videa v HDR8 in HDR10 ANAFI Ai pokriva dinamično območje 14EV. Format HDR10 ponuja največjo svetlost 1000 nit in barvno globino 10 bitov. Zagotavlja milijardo barvnih lestvic v primerjavi s 16 milijoni za standardni dinamični razpon. V primerjavi s HDR8 HDR10 proizvaja slike več kot dvakrat svetlejše z ustreznim povečanjem kontrasta. HDR8 je mogoče prikazati na katerem koli standardnem zaslonu, HDR10 pa za televizorje in zaslone HDR10.
Fotografski načini
Opis načinov
Oddelek za nadzor načina vsebuje nastavitve, ki vplivajo na število posnetkov, ki se posnamejo vsakič, ko spustite zaklop.
Način posamičnega zajema
Standardni način posamičnega zajema. Po vsakem sprostitvi zaklopa sistem posneto sliko takoj obdela.
Način kadriranja
Uporabniki lahko posnamejo serijo 3, 5 ali 7 sličic z različno osvetlitvijo za vsak okvir. Na voljo so naslednje prednastavitve:
- [-1 EV, 0, 1 EV] (privzete nastavitve)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

Način zaporednega snemanja
Način zaporednega snemanja bo uporabniku omogočil, da v 1 sekundi posname zaporedje 10 sličic.
Panoramski način
Panoramski način vključuje štiri različne panoramske posnetke:
- Sferični (360 °) je panoramski način, ki vključuje tri možnosti za snemanje sferične panorame: Sphere / Little Planet / Tunnel.
- Vodoravno (180 °)
- Navpično (109 °)
- Superwide - novo super način širokega šivanja 9 slik (HFOV 110 °, ravna panorama)
Za podrobnosti o specifikacijah panoramskega načina glejte spodnjo tabelo:

Timelapse mode
Ta način vam omogoča fotografiranje v naslednjih fiksnih časovnih intervalih:
- 48MP: 1, 2, 4, 10, 30 ali 60 sekund.
- 12MP: 0,5, 1, 2, 4, 10, 30 ali 60 s.
Način GPS Lapse
Ta način fotografiranja je bil razvit za pregled in fotogrametrijo. Omogoča vam fotografiranje v naslednjih intervalih fiksne razdalje: 5, 10, 20, 50, 100 ali 200 metrov.
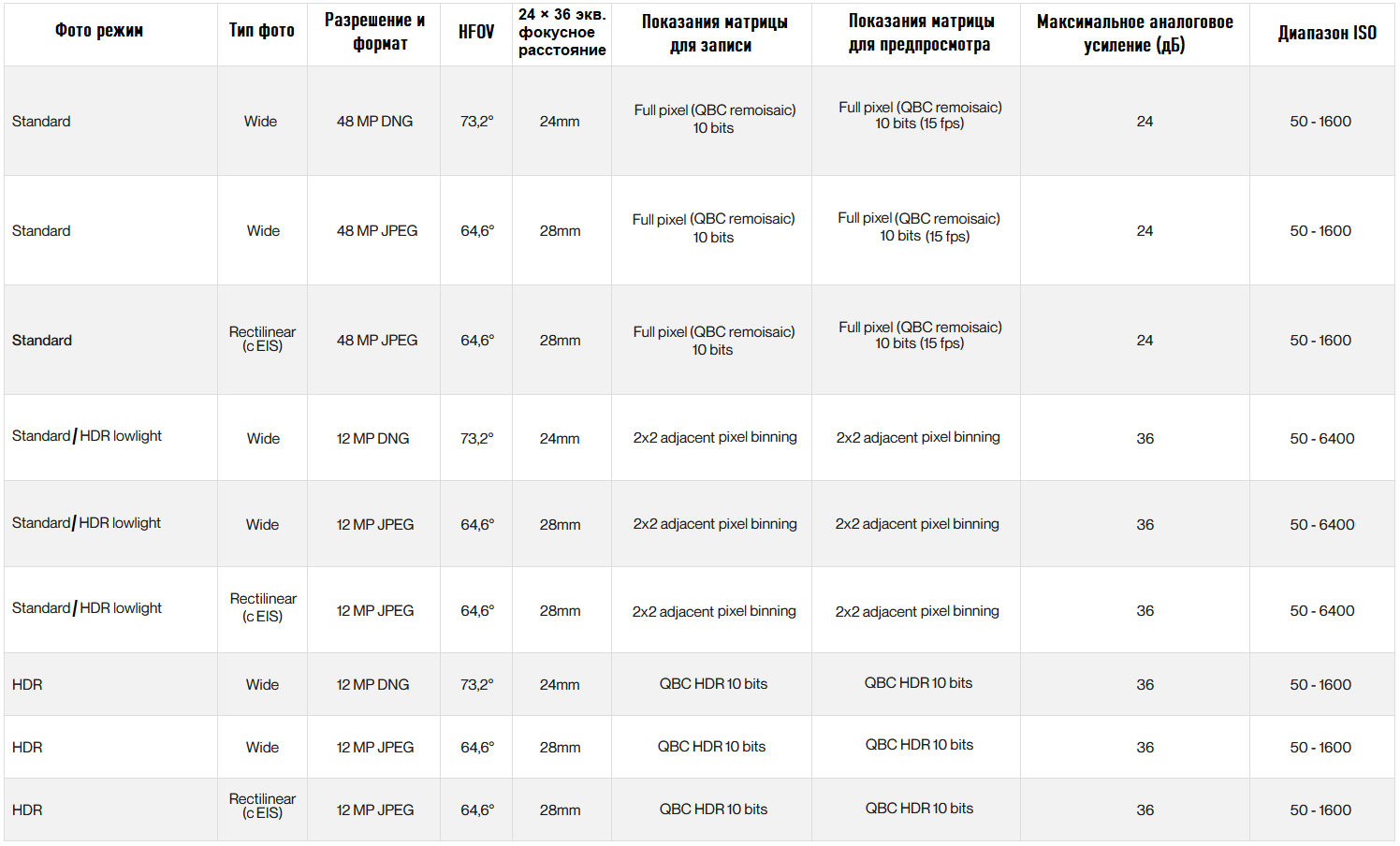
Spodnja tabela prikazuje načine in ločljivosti zajema fotografij, vključno z načinom odčitavanja senzorja:
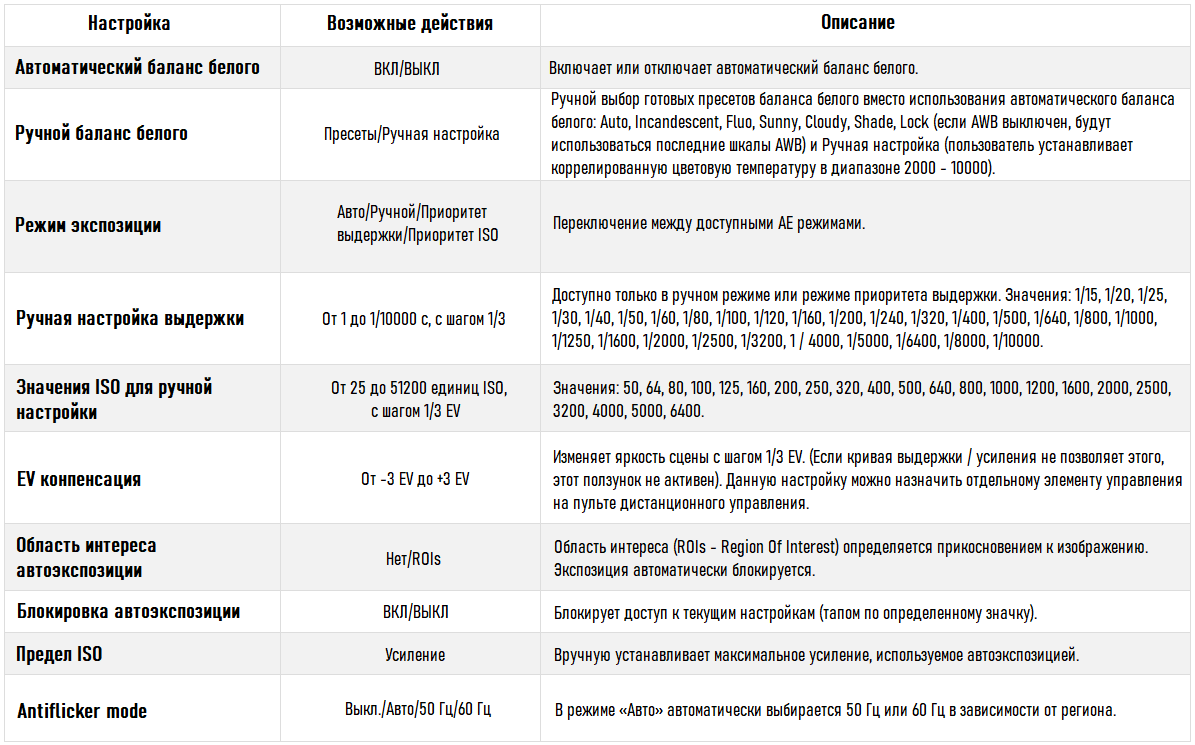
Nastavitve
V naslednjem tabela navaja razpoložljive nastavitve za vsak način.
6 -kratna povečava
Povečava je na voljo v vseh foto in video načinih. V kombinaciji s senzorjem za 48 milijonov slikovnih pik natančni algoritmi ostrenja ustvarjajo slike visoke ločljivosti tudi pri uporabi 6-kratnega digitalnega zooma. Uporabniki ANAFI Ai lahko zdaj vidijo 1 cm podrobnosti z razdalje 75 m. Veliko število slikovnih pik omogoča tudi obrezovanje 4K videa na 1080p brez izgube kakovosti.

Hibridna stabilizacija
ANAFI Ai ima najbolj natančno stabilizacijo na trgu mikro UAV.
Združuje kombinirano stabilizacijo:
- 3-osno mehansko (3-osno mehanskoGimbal)
- Elektronska 3-osna (EIS)
Mehanska stabilizacija stabilizira usmerjeno os kamere ne glede na letalski položaj letala. Elektronska stabilizacija slike popravlja učinke mikrovibracij pri frekvencah nad 100 Hz, česar mehanski pogon ne zmore.
Gimbal glavne kamere
Mehanska stabilizacija vam omogoča stabilizacijo in orientacijo vodoravne osi pogleda kamere v vseh 3 osi.
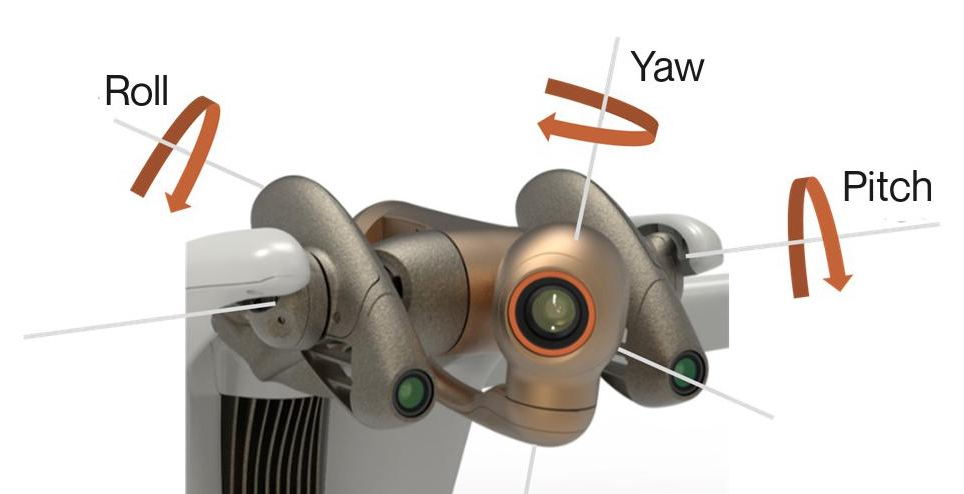 3 osi vrtenja meh. vzmetenje glavne kamere ANAFI Ai.
3 osi vrtenja meh. vzmetenje glavne kamere ANAFI Ai.
Ključne lastnosti
- 3 -osni mehanski nosilec za glavno kamero
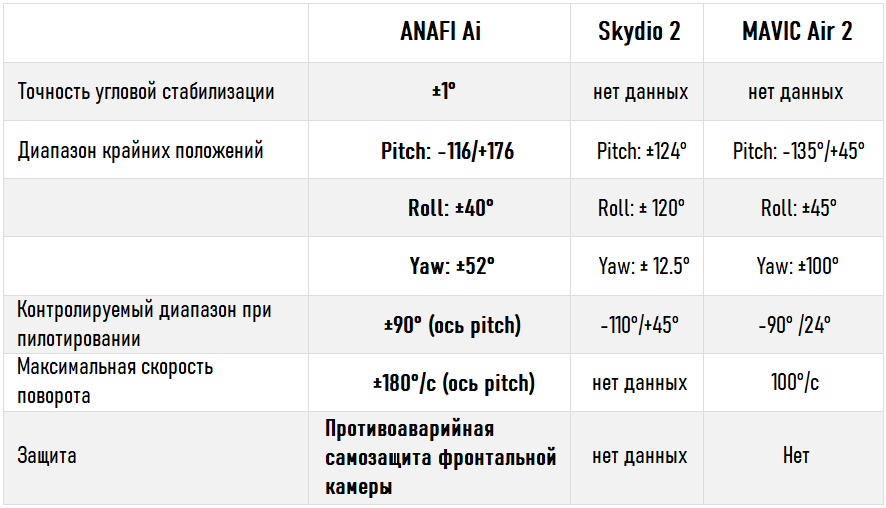
- Navpični odmik 292 °, vidno polje -116 ° do 176 °
Performance kardanske gredi
- Algoritem EIS popravlja učinke nihanja in popačenja širokokotne leče ter izvaja tudi 3-osno digitalno stabilizacija slike (Roll, Pitch and Yaw).
- Metoda je sestavljena iz uporabe geometrijske transformacije slike. Geometrijska transformacija je zaradi IMU povezana s časovnim žigom in natančnim položajem.
- Geometrijska transformacija se uporabi za vsako sliko glede na optično popačenje, vibracije in premike izmerjene enote kamere.
Območje vrtenja 292 °
Kamera ima vodoravno območje vrtenja -116 ° / 176 ° okoli osi nagiba, s čimer omogoča opazovanje nad in pod dronom, kar je edinstvena priložnost na trgu mikro-UAV.
![]()
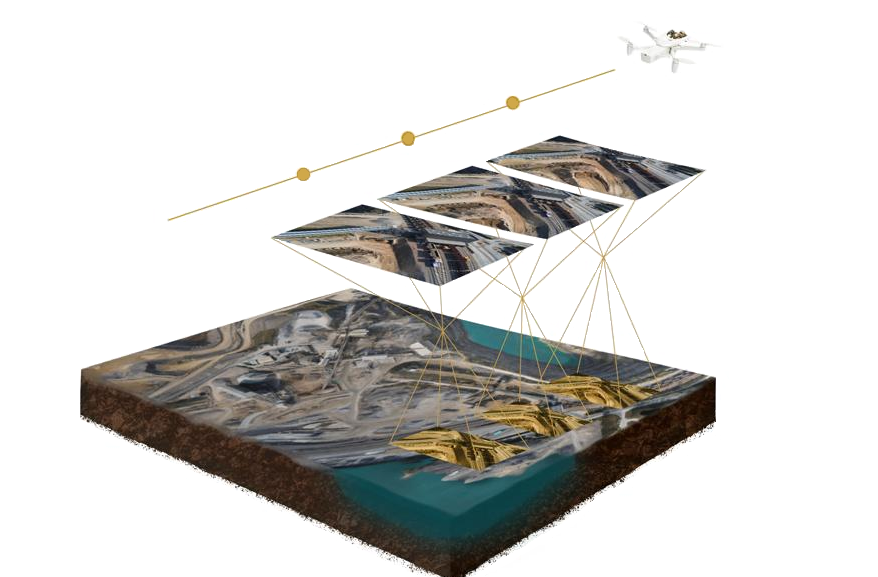
Fotogrametrija
Snemanje iz zraka z brezpilotnimi letali spreminja način, na katerega strokovnjaki izvajajo inšpekcijske preglede in raziskovanje. Metode fotogrametrije se uporabljajo za obdelavo slik, ki jih zbirajo UAV, za izdelavo 2D in 3D modelov, ki kasneje strankam omogočajo, da pravočasno načrtujejo vzdrževanje pregledanih predmetov.
4G zagotavlja neverjetno zanesljivost podatkovne povezave brezpilotnih letal. Uporabniki lahko upravljajo brezpilotne letalnike na velikih površinah, v bližini kovinskih konstrukcij, stavb, brez strahu pred izgubo komunikacije.
Inšpekcijski pregled in kartiranje
Z združevanjem AI brezpilotnega letala ANAFI Ai s spletno platformo PIX4Dinspect bodo uporabniki lahko izvajali pregledi hitrejši in učinkovitejši kot kdaj koli prej. Algoritmi strojnega učenja prepoznajo antene na celičnih stolpih, določijo njihovo velikost, višino, nagib, azimut in navpičnost.
Kliknite spodnje slike za ogled demo 3D modelov, ki jih je ustvaril ANAFI Ai.
Primer # 1

Primer # 2
Matrica najboljšega razreda
Kamera brezpilotnega zrakoplova ANAFI Ai je opremljena s 48 MP 1/2-palčnim CMOS senzorjem, zgrajenim s tehnologijo barvnega filtra Quad Bayer, ki je kot kdaj koli prej primerna za pregled in fotogrametrijo. Uporabljena matrika omogoča pridobivanje podrobnih slik s širokim dinamičnim razponom.
Fotografije visoke ločljivosti
ANAFI Ai lahko ustvari fotografije s 48 milijoni slikovnih pik, s čimer zajame vse podrobnosti v visoki ločljivosti in ustvari oblak točk z visoko gostoto.
Pomembna ostrina
Inšpekcijske naloge zahtevajo sposobnost identifikacije najmanjših podrobnosti, kot so serijske številke, priključki, madeži rje in začetne razpoke.
Širok dinamični razpon
10 stopenj dinamičnega območja v standardnem načinu, 14 postankov v načinu HDR. Optimalna gradacija slike je bistvena za ustvarjanje skladnih točk oblaka in visokokakovostne 2D ali 3D rekonstrukcije.
55% več podrobnosti kot 1-palčni senzorji
48MP 1/2-palčni Quad Bayerjev senzor drona ANAFI Ai je ostrejši od 20MP 1-palčnih senzorjev, uporabljenih v številnih sodobni profesionalni brezpilotni letali. Naslednje slike iz pregleda strehe ANAFI Ai in DJI Phantom 4 Pro V2.0 na isti višini jasno dokazujejo to dejstvo.

Idealen za inšpekcijske preglede
ANAFI Ai gimbal vključuje 6-osni hibridni (mehanski elektronski) stabilizacijski sistem, ki kompenzira nihanja leta in zagotavlja ostrino slike. Kamera ANAFI Ai ima nastavljiv razpon od -90 ° do 90 °, zaradi česar je idealen instrument v zraku za ogled spodnje strani podnožja mostu.
Krmiljen nagib ± 90 °
Natančnost
ANAFI Ai uporabnikom omogoča doseganje GSD 0,46 cm / px z višine 30 m, kar pomeni relativno natančnost planimetrije do 0,92 cm.
Za primerjavo, na isti višini DJI Phantom 4 Pro V2 zagotavlja GSD le 0,82 cm / px. Z drugimi besedami, ANAFI Ai lahko preslika isti cilj, ki leti več kot 1,5 -krat višje od Phantoma, z enakovredno stopnjo podrobnosti.
Zmožnosti AI in 4G
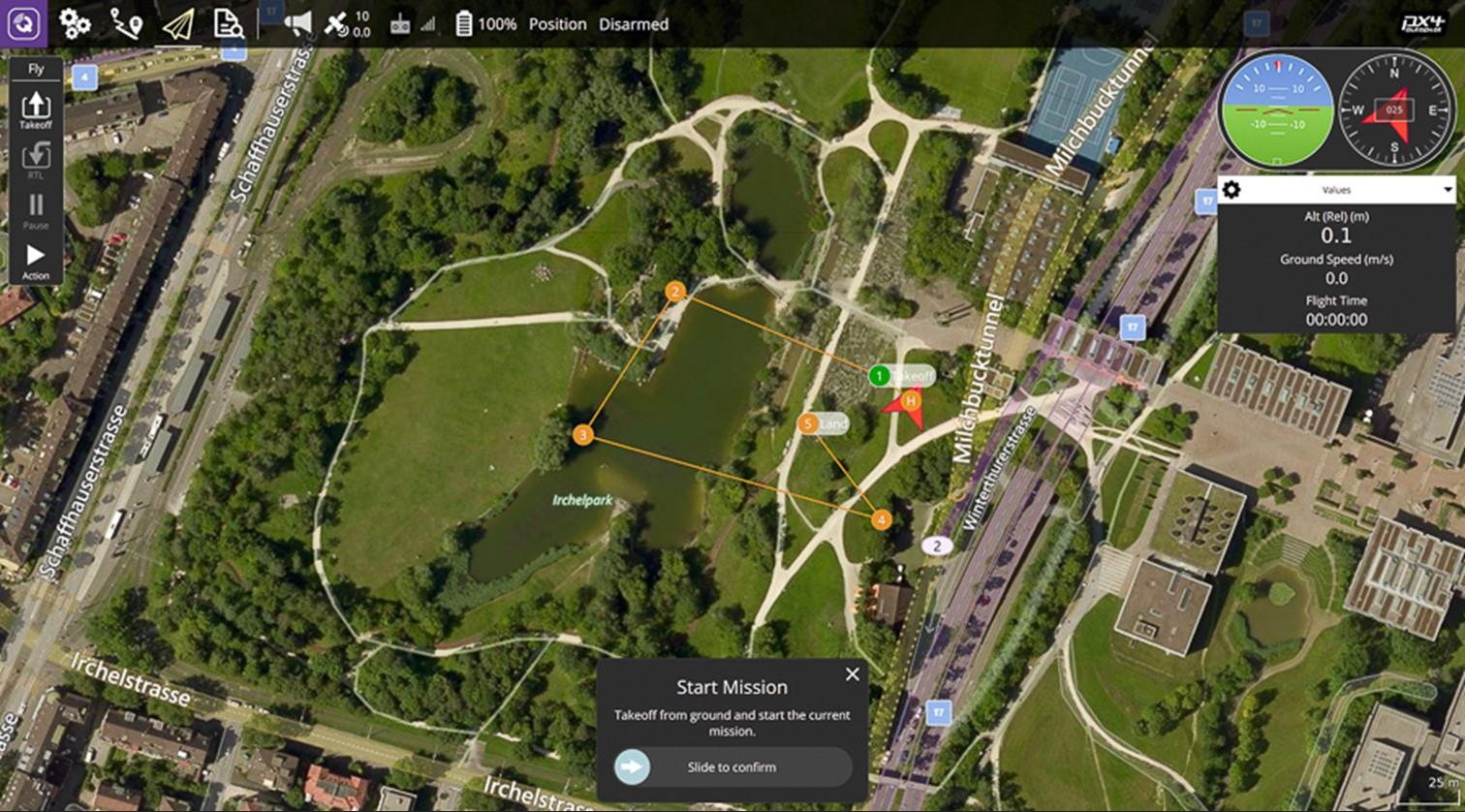
Ena aplikacija. Vsak načrt letenja
Potencial mobilne aplikacije FreeFlight 7 uporabniku omogoča izvajanje vseh misij za pregledovanje, pregledovanje in fotogrametrijo.

Razpoložljivi fotogrametrični načini letenja
V mobilni aplikaciji FreeFlight 7 so zdaj na voljo naslednji fotogrametrični načini letenja:
- Mreža
- Dvojna mreža
- Krožna
Ustvarite načrt leta z enim dotikom
En dotik na interaktivnem zemljevidu FreeFlight 3D je vse, kar potrebujete za hitro skeniranje zgradbe. Umetna inteligenca samodejno določi optimalne parametre in pot leta. 48MP slike z natančno geo-referenco senzorjev ANAFI Ai (IMU, GNSS in čas letenja) omogočajo natančno 3D rekonstrukcijo.
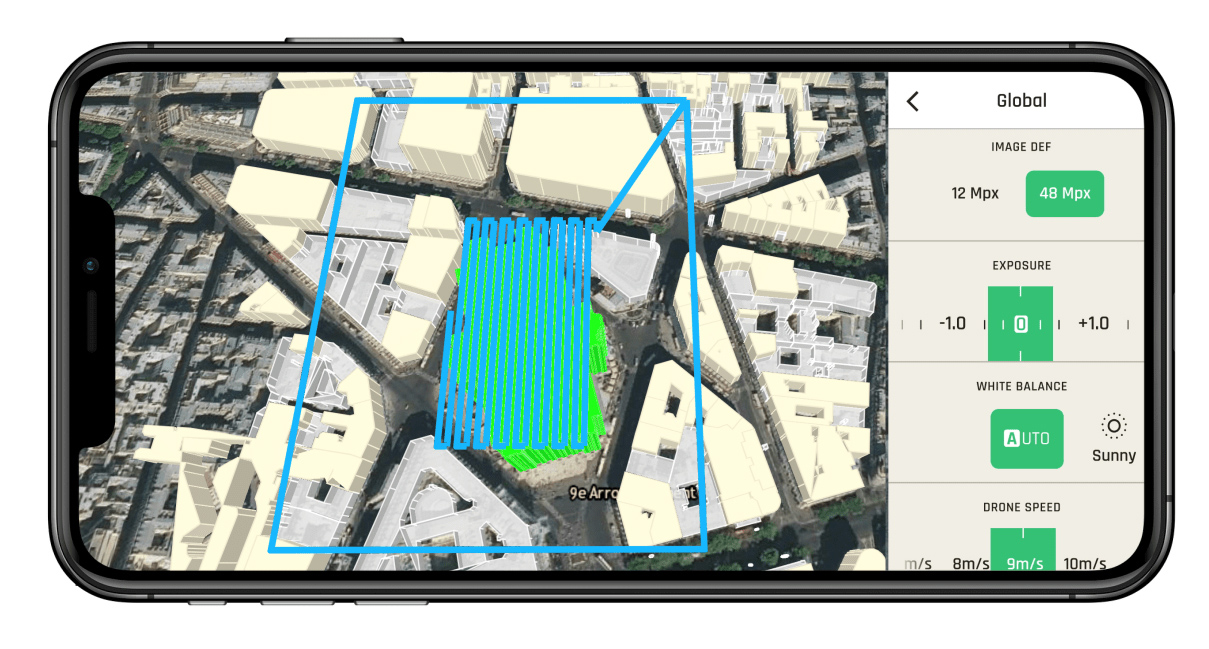 Samodejni načrt leta, ustvarjen z enim dotikom v 3D zemljiški knjigi.
Samodejni načrt leta, ustvarjen z enim dotikom v 3D zemljiški knjigi.
- Kartografsko ozadje FreeFlight 7 je iz programske opreme ArcGIS. Predstavitev 3D -stavb temelji na podatkih OpenStreetMap, ki pokrivajo mesta po vsem svetu.
- Sistemi vizualizacije zagotavljajo varnost določenega načrta leta: uporabnikom ni treba skrbeti zaradi ovir. ANAFI Ai se jim avtonomno izogiba.
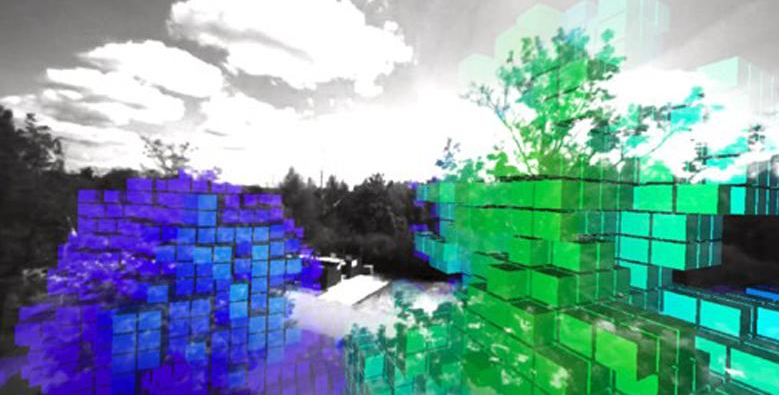
Avtonomni let
Vsesmerni senzorski sistem ANAFI Ai se na podlagi stereoskopskega vida samodejno orientira v smeri vožnje.

Dron zazna ovire, ki so oddaljene 30 metrov. Predstavlja okolje brezpilotnih letal v voxelih.
Algoritmi določijo najboljšo pot, da se izognejo trčenju z ovirami, medtem ko je dron še vedno osredotočen na svoj cilj: dodeljeno letalsko nalogo.

4G povezava
ANAFI Ai je prvi komercialni mikrodron, opremljen z modulom 4G. Pokriva več kot 98% frekvenc, ki se uporabljajo po vsem svetu.

Pregled visokonapetostnih daljnovodov. Posneto z ANAFI Ai, urejeno s Pix4Dmatic. Velikost prizora: 4060 × 60 × 70 m. Število slik: 2172. GSD: 1,3 cm / piks. Višina: 90 m. Sprednje / stransko prekrivanje: 90% / 65%.
Dron lahko brez težav preklopi z Wi-Fi na 4G in obratno ter tako zagotovi najbolj zanesljivo povezavo, kar pa zagotavlja:
- Sposobnost izvajati lete BVLOS
- Stabilna povezava tudi med letenjem v okoljih z ovirami in zgradbami
- Varno letenje v okoljih z visokim hrupom
- Kakovost video povezave 1080p pri 30 fps
- ) Neposredno nalaganje slik na strežnike v oblaku

Optimizacija časa letenja
Po mnenju razvijalca so bili zaradi visoke slike doseženi znatni prihranki časa Značilnosti ANAFI Ai:
- 48 MP omogoča brezpilotnemu letalu več kot 1,5-krat višjo letenje kot brezpilotna letala z 20-milimetrskimi 1-palčnimi senzorji, hkrati pa dosega isti GSD. Z drugimi besedami, večja nadmorska višina in hitrejša misija gresta z roko v roki.
- 1 posnetki na sekundo: ANAFI Ai snema dvakrat hitreje kot Autel EVO 2 in DJI Phantom 4 Pro V2.0.
Prenos 4G med letom v PIX4Dcloud
V procesu ustvarjanja digitalnega modela iz letalskih posnetkov brezpilotnega letala, prenosa datotek in obdelave fotografije so dve dolgotrajni nalogi. ANAFI Ai uporabnikom pomaga pospešiti potek dela. Sistem brezpilotnih letal omogoča zlasti:
- Prenos slik na zaščitene strežnike neposredno med letom prek povezave 4G drona.
- Takoj začnite z izračunom predmetov na koncu leta: ortomozaike, oblak točk, modeli višin in teksturirana mreža.
- Enostavno delite 2D zemljevide in kakovostne 3D -modele raziskav z zaposlenimi in strankami.
![]()
Združljivost s PIX4D Suite
ANAFI Ai je zdaj popolnoma združljiv z edinstvenim naborom mobilnih, namiznih in aplikacij za fotogrametrijo v oblaku, ki jih sestavljajo:
Fotogrametrija ali lidar
Zakaj izbrati fotogrametrijo za raziskovanje in raziskovanje? Poleg dostopnosti in enostavne uporabe je zračna fotogrametrija najboljša izbira, kadar je potrebna vizualna interpretacija podatkov.
Profesionalci fotogrametrije
- Omogoča več vizualizacij: ortomozaik, oblak barvnih točk, teksturirana mreža.
- Ustvari oblak točk z večjo gostoto, od katerih vsaka vsebuje znatno količino informacij (višina, tekstura, barva).
- Po natančnosti fotorealističnih 2D in 3D upodobitev presega LIDAR - LIDAR ne zagotavlja visoke ravni podrobnosti o kontekstu.
slabosti LIDAR
- Stane 100 -krat več kot UAV z matriko RGB.
- Kompleksnost obdelave podatkov in možne napake pri razlagi.
- Dodajanje barvnih informacij je možno, vendar otežuje postopek.
- LIDAR ustvarja samo oblak točk in je namenjen za posebne primere in situacije.
SDK
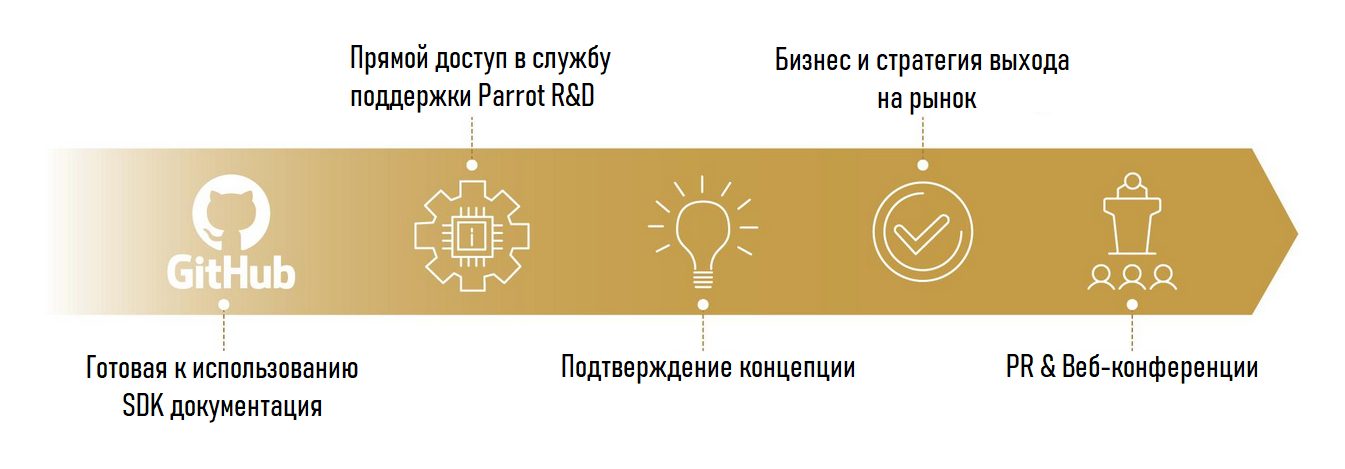
Parrot Software Development Kit je odprtokodni nabor orodij in programske opreme za razvijalce. Od nastanka prvega brezpilotnega letala A. R. Drone, odprtokodna programska oprema podjetja, podpira razvojne platforme in orodja, in Parrot
Razvijalec pojasnjuje, da so vsi viri SDK podjetja na voljo brezplačno, brez registracije in sledenja, na portalu " Parrot Portal za razvijalce"... Pridružite se lahko tudi tisočem razvijalcev na forumu Parrot, kjer se lahko o trenutnih temah pogovarjate neposredno z inženirji podjetja.
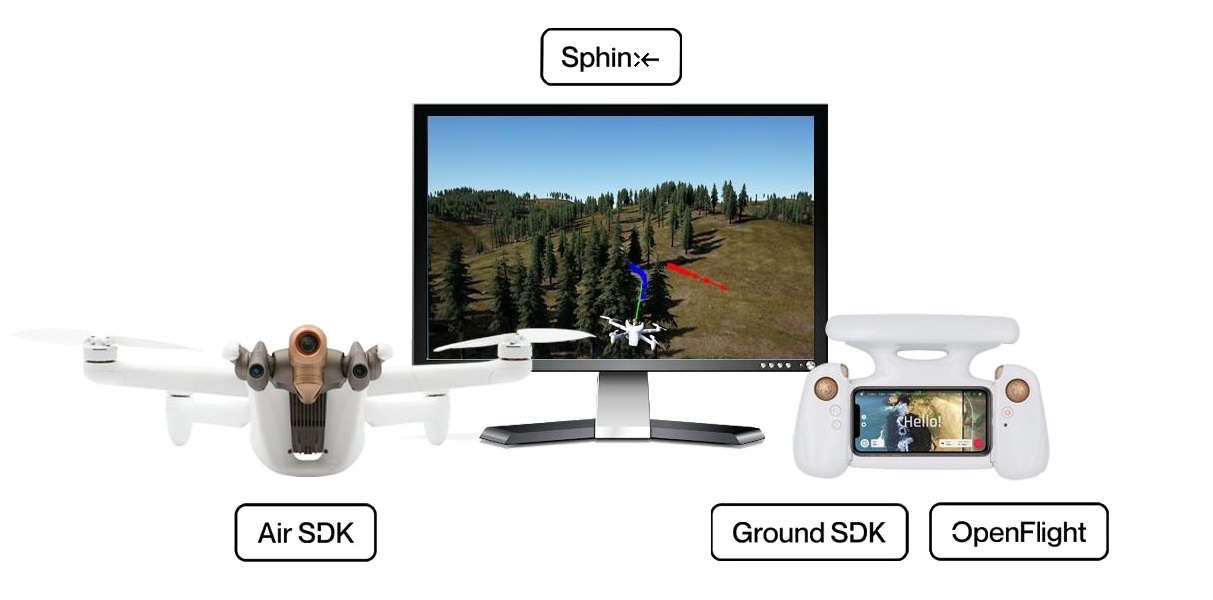
Air SDK
Zaženite kodo na ANAFI Ai
Air SDK ponuja revolucionarno tehnološko arhitekturo za prenos in zagon kode neposredno na ANAFI Ai. Razvijalci lahko programirajo misije letov po meri z dostopom do vseh senzorjev brezpilotnih letal, vmesnikov za povezavo in funkcij avtopilota.
Air SDK na krovu omogoča dostop do:
- vseh senzorjev (IMU, GPS, TOF) in načinov letenja
- videotoka in metapodatkov z vsemi kamerami
- Komunikacijski vmesniki Wi-Fi, 4G, USB
- Zemljevidi globin in polja za polnjenje
- Ustvarjanje poti izogibanja oviram
Vsak razvijalec lahko:
- spremeni stanje brezpilotnega letala z ustvarjanjem letalskih misij
- spremeni način navigacije
- doda vdelane procese Linuxa (za na primer prenos podatkov po kanalu 4G ali uporaba računalniškega vida)
Air SDK podpira programski jezik C ali Python. Air SDK vsebuje podroben vodnik za namestitev in dokumentacijo API. Številni primeri uporabe ponazarjajo vse možnosti, ki jih ponuja njegova edinstvena arhitektura.
Ground SDK
Zgradite zmogljivo mobilno aplikacijo
Ground SDK je programska platforma Ground Control Station (GCS) za mobilne naprave (podprta sta iOS in Android). Omogoča vsakemu razvijalcu, da ustvari mobilno aplikacijo za ANAFI Ai za kasnejši nadzor nad dronom neposredno iz mobilne naprave. Vse funkcije BVS (nadzor, video, nastavitve) so na voljo prek enostavnega za uporabo in v celoti dokumentiranega API-ja.
OpenFlight
Odprtokodna zemeljska nadzorna postaja
Parrot prvič odpre izvorno kodo za svojo aplikacijo zemeljske nadzorne postaje. OpenFlight je jedro naše slavne odprtokodne aplikacije FreeFlight 7. To omogoča razvijalcu, da se osredotoči na dodajanje lastnih funkcij in ima takoj pripravljeno aplikacijo profesionalnega videza, pripravljeno za objavo v AppStore.

OpenFlight vsebuje:
- Vse UX FreeFlight 7
- Vse nastavitve vmesnika
- Koda za 3D-vizualizacijo ovir v realnem času
- Koda za upravljanje komunikacij 4G
- OpenFlight je objavljen pod licenco BSD-3 s popolnim vodnikom za namestitev in obsežno dokumentacijo.
Sfinga
3D fotorealistična simulacija
Parrot Sphinx je napredno orodje za simulacijo brezpilotnih letal. Inženirji Parrot ga uporabljajo za razvoj in preizkušanje vseh funkcij ANAFI Ai. Splošni koncept je simulacija dejanske vdelane programske opreme drona z vsemi njegovimi senzorji v vizualno in fizično realnem okolju.

Parrot Sphinx omogoča:
- Simulacija vseh kamer in senzorjev
- Simuliranje zemljevidov globine in segmentacije slike
- Krmarite po številnih realističnih 3D prizorih
- Povežite se z različnimi vrstami daljinskih upravljalnikov
- Uporabite skripte za nadzor simulacije
- Dodajte pešce in vozila
- Vizualizirajte in zabeležite podatke o letu
- Prilagodite senzorje letala in okoliške fizične elemente
- Nadzor faktorja v realnem času
Papiga Sfinga je zgrajena na podlagi naprednih standardov komponente:
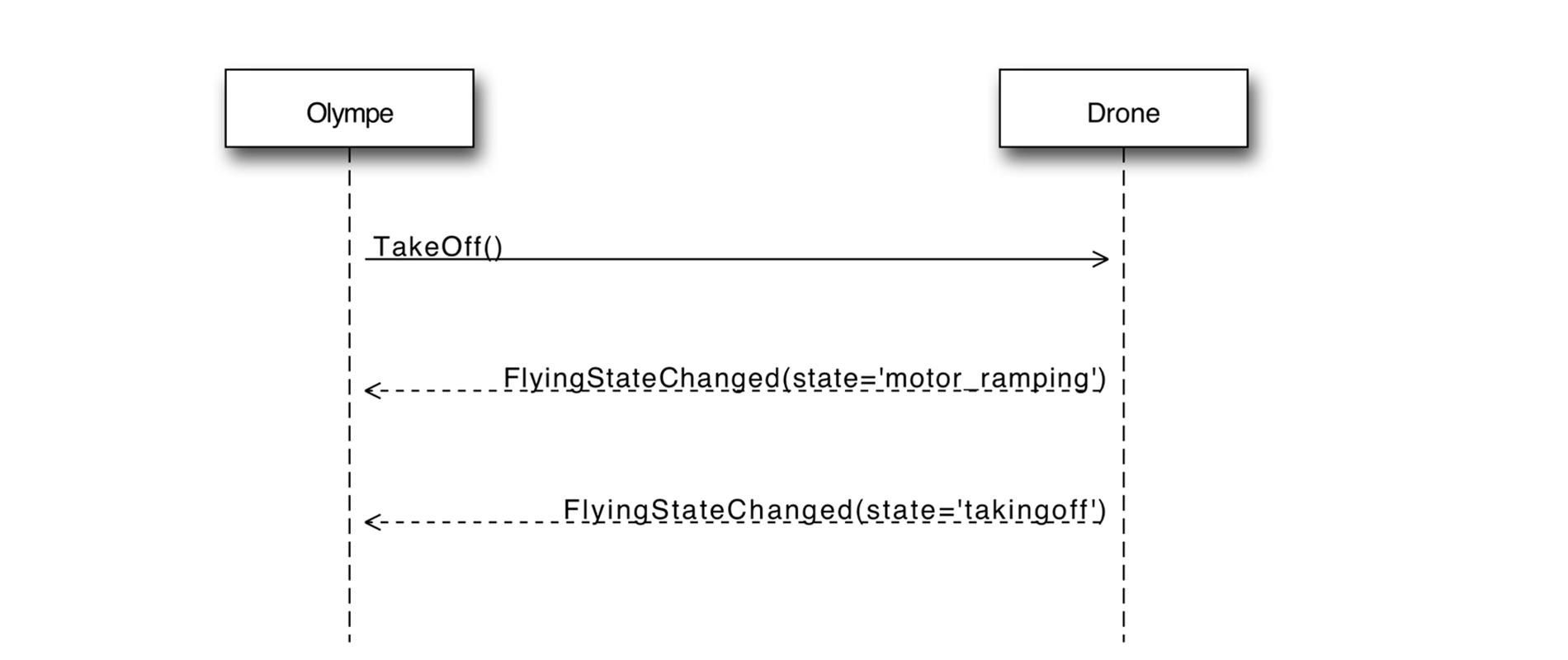
Olympe
Python za nadzor ANAFI Ai
Olympe ponuja programski vmesnik krmilnika Python za ANAFI Ai. Prvotni namen Olympe je bil interakcija z modelarskim okoljem Sphinx. Olympe lahko nadzoruje tudi fizični ANAFI Ai iz oddaljenega računalnika.
Olympe framework omogoča:
- Povežite se s simuliranim ali fizičnim ANAFI Ai
- Pošljite ukazna sporočila (pilotiranje, usmerjenost kamere, vrnitev na dom, Načrt leta)
- Začetek in ustavitev pretakanja videa iz vseh kamer
- Snemanje videotoka in sinhroniziranih metapodatkov
) PdrAW
Napredni predvajalnik medijev
PDrAW je napreden pregledovalnik videov za medije ANAFI Ai. Pregledovalnik podpira pretakanje (RTP / RTSP) in posneti (MP4) video na platformah Linux, macOS, Android in iOS. PDrAW je na voljo kot knjižnica (libpdraw), knjižnica ovoja (libpdraw-backend) in samostojna izvedljiva datoteka (pdraw).
PDrAW upravlja tudi videopodatke. Na ANAFI Ai tako pretočni kot posneti video vključujejo metapodatke, ki so javno dostopni in dokumentirani, kar omogoča napredno obdelavo video posnetkov iz zraka.
Modeli C. A. D.
Parrot ponuja 3D modele svojih brezpilotnih letal za integracijo v vašo CAD zasnovo za hitro izdelavo prototipov in integracijo dodatne opreme.
Združljivost MAVLink in GUTMA
ANAFI Ai je združljiv s standardnim odprtokodnim protokolom MAVLink v1, ki omogoča izmenjavo podatkov v realnem času med UAV in nadzorno postajo. ANAFI Ai lahko upravljate ročno ali z avtomatskim načrtovanjem leta z bazne postaje, združljive z MAVLink, kot je QGroundControl.
* Vmesnik QGroundControl
ANAFI Ai je združljiv z odprtokodnim standardnim protokolom podatkov o letu GUTMA. Globalno združenje UTM je konzorcij glavnih akterjev na področju kontrole zračnega prometa.

Največji partnerski ekosistem za brezpilotne letalnike Parrot
Parrot še naprej širi partnerski program SDK za svetovni ekosistem ponudnikov programske opreme za brezpilotne letalnike ponuja posebne in edinstvene rešitve za rastoče in razvijajoče se potrebe poklicnih uporabnikov.
Papiga za vse poslovne potrebe
Da bi kar najbolje izkoristili postopek inšpekcijskega pregleda, Parrot svojim strankam ponuja ekosistem združljive programske opreme za brezpilotna letala, od upravljanja flote do zbirnih letov načrtovanje in uvoz dnevnikov letov, pred snemanjem, kartiranjem, spremljanjem in analizo prejetih podatkov.
PIX4D × papiga
aplikacije za 2D / 3D modeliranje. Edinstven nabor mobilnih, namiznih in aplikacij za fotogrametrijo v oblaku.
Verizon x Skyward x Parrot
4G LTE dronska rešitev v Združenih državah. Prvi tovrstni robotski dron ANAFI Ai, povezan z omrežjem Verizon 4G LTE s predhodno nameščeno programsko opremo Skyward. Odpira vrata za prenos podatkov v realnem času, oddaljeno uvajanje in lete, ki niso vidni.

Skyward × Parrot
Integracija in učenje v okviru zmogljivosti ANAFI. Platforma za upravljanje letalstva, vključno z zračnim prostorom, dostopom LAANC in usposabljanjem, opremo in povezljivostjo za uporabo flote brezpilotnih letal v podjetjih.

DroneSense × Parrot
Ustvarite, upravljajte in razširite svoje programe za brezpilotne letalnike. Strokovnjaki za brezpilotna letala v sektorju javne varnosti lahko uporabljajo celoten nabor zmogljivosti DroneSense, posebej zasnovanih za potrebe prvih odzivov.

Parrot Ecosystem Partners

Parrot Partnerski program
Razvijalec predlaga razširitev zmogljivosti njegov program za brezpilotne letalnike z vključitvijo njihovega SDK -ja.
Kibernetska varnost
Zaupnost podatkov
Razvijalec ugotavlja, da ne zbira kakršne koli podatke brez privolitve uporabnikov. Odločitev o prenosu podatkov v infrastrukturo Parrot ali ne so izključno uporabniki sami. Podatki, ki jih gosti Parrot, uporabniku omogočajo sinhronizacijo podatkov o letu in načrtov letenja med različnimi napravami ter olajšajo podporo in Parrotu omogočijo izboljšanje svojih izdelkov.
ANAFI Ai je v skladu s Splošno uredbo o varstvu podatkov Evropske unije (GDPR) in gre še dlje, na primer omogoča brisanje vseh podatkov z enim klikom in s tem uporabnikom omogoča najlažji nadzor. Ta težava z enim klikom je rešena v mobilni aplikaciji FreeFlight7 ali v nastavitvah zasebnosti računa Parrot. Cloud. Tako lahko uporabniki kadar koli ne le ustavijo izmenjavo podatkov, ampak tudi preprosto zahtevajo njihov izbris.
Če uporabnik privoli v izmenjavo podatkov, bo njihova obdelava izvedena v popolnoma pregledni obliki, podrobno opisani v pravilniku o zasebnosti papige.
Ko je ANAFI Ai povezan s Skycontrollerjem 4 prek 4G, se Parrot infrastruktura uporablja za seznanjanje drona in daljinskega upravljalnika. Če uporabnik ni prijavljen v račun Parrot. Cloud, lahko še vedno uporablja povezavo 4G z edinstvenim začasnim računom. Ko uporabljate infrastrukturo Parrot za združevanje 4G, je video šifriran s ključem, dogovorjenim med brezpilotnim letalom in daljinskim upravljalnikom, Parrot nima dostopa do nešifriranega videa.

skladen s FIPS140-2 in varnostnim elementom CC EAL5
ANAFI Ai ima vgrajen varnostni element Wisekey, ki je skladen z NIST FIPS140-2 stopnja 3 in skupna merila EAL5. Podoben varnostni element je vgrajen tudi v krmilno strojno opremo Skycontroller 4.
Funkcije varnostnega elementa:
- Izvaja kriptografske operacije
- Shrani in varuje zaupne podatke
Uporablja osebni ključ ECDSA s parametri domene P521, ki je edinstven za vsak dron. Ni ga mogoče izvleči iz varnostnega elementa. Potrdilo, povezano s tem ključem, podpiše overitelj.
Wisekey ščiti celovitost vdelane programske opreme, zagotavlja edinstveno identifikacijo brezpilotnih letal za 4G združevanje in močno avtentikacijo ter edinstven digitalni podpis fotografij, ki jih je posnel dron.

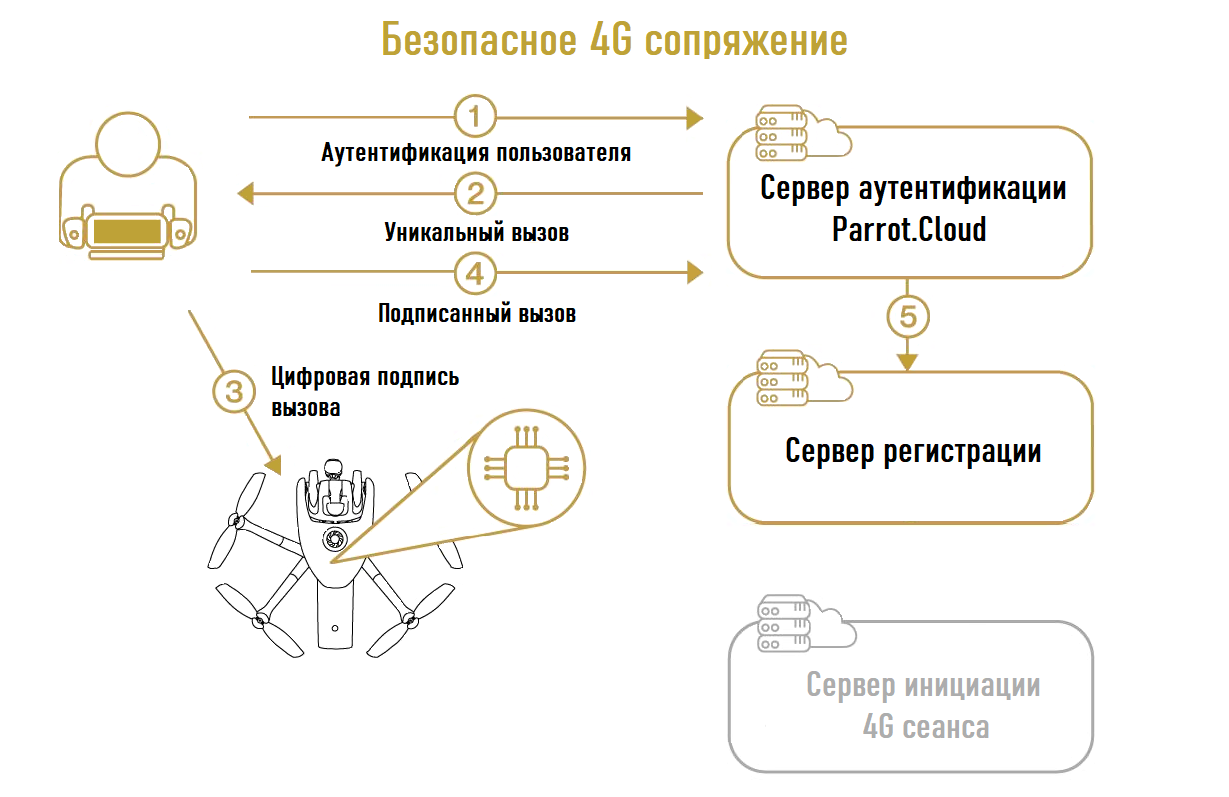
4G varna povezava in močna avtentikacija
postopek varnega seznanjanja naprav. Med tem postopkom uporabnik zanesljivo potrdi, da je povezan z določenim brezpilotnim letalom. Zahvaljujoč ANAFI Ai Secure Elementu lahko to stori brez vnosa gesla v dron.
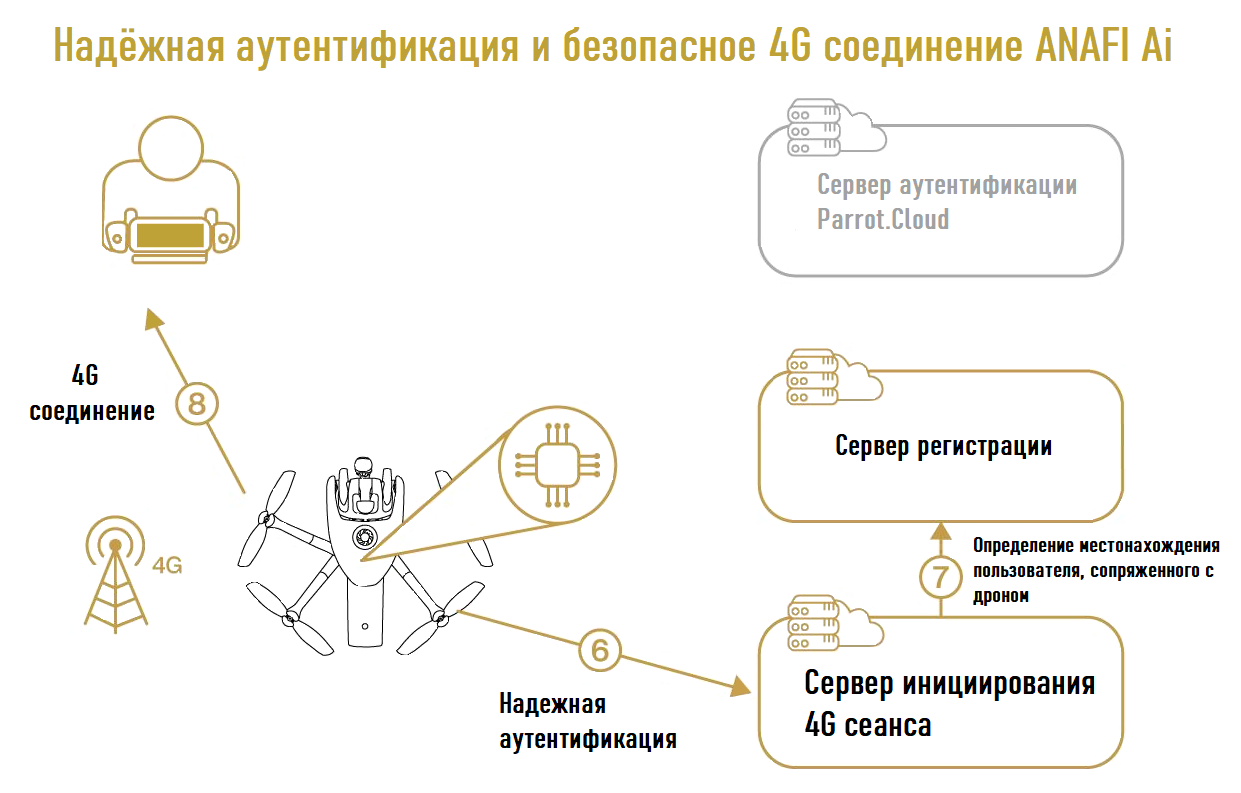
Strežniki Parrot nato registrirajo komunikacijo med uporabnikom in brezpilotnim letalom. Ko se povezava Wi-Fi med uporabnikom in dronom izgubi, bo ANAFI Ai samodejno preklopil na povezavo 4G. ANAFI Ai izvaja močno preverjanje pristnosti na strežnikih Parrot z uporabo zasebnega ključa, shranjenega v varnem elementu. Strežniki Parrot iščejo povezane uporabnike in nudijo vmesnik med ANAFI Ai in Skycontroller 4.
Za zaščito nadzora brezpilotnih letal in videotokov, ki prihajajo na Skycontroller 4, ANAFI Ai podpira protokole TLS, DTLS in SRTP.
Varno inicializiranje in posodabljanje
Zaporedje zagona letala je zaščiteno: sistem preveri da uporablja programsko opremo Parrot in da do te programske opreme ni prišlo. Varnostno preverjanje se izvede pri vsaki inicializaciji. Storitev za posodabljanje nadzoruje tudi digitalni podpis posodobitev programske opreme.
Nastavitev uporabniških ključev na varnem elementu
Uporabniki ANAFI Ai imajo dostop do posebnega operaterskega računa Secure Element. Ta račun se uporablja za nastavitev ključev, ki so pomembni za tega uporabnika. Uporabniki lahko konfigurirajo Secure Element z javnimi ključi ponudnikov misij, ki jim zaupajo. ANAFI Ai bo opravljal le misije, ki so podpisane s temi ključi. Ta postopek preprečuje napadalcem izvajanje zlonamernih misij letenja na brezpilotnem letalu.
Digitalno podpisane fotografije
Varen element iz ANAFI Ai lahko digitalno podpiše slike brezpilotnih letal. Ta podpis je dokaz, da:
- Omenjeno podpisano sliko je posnelo navedeno brezpilotno letalo.
- Niti sama slika niti njeni metapodatki niso bili obdelani (prostovoljno ali ne) - metapodatki, znani tudi kot EXIF in XMP, vsebujejo podatke o datumu, uri in lokaciji slike.

Z drugimi besedami, digitalni podpis ščiti vse podatke, povezane s sliko, vključno z mestom in časom, ko je bila posneta, in s katerim dronom ANAFI Ai.
Uporabniki in partnerji, ki ponujajo programske rešitve, ki uporabljajo fotografiranje z brezpilotnimi letali, lahko preverijo digitalni podpis fotografij ANAFI Ai bodisi s potrdilom o brezpilotnih letalih bodisi s katalogom javnih ključev, ki ga je zagotovil Parrot.
Preglednost in tekoči varnostni pregledi z nagrado Bug
Parrot uporablja standardne protokole in oblike datotek, kadar je to mogoče. Ni prikrite kode ali skritih funkcij. To uporabniku omogoča, da razume, kako delujejo izdelki Parrot, in preizkusi njihovo varnost. Poleg tega je OpenFlight, programska oprema za upravljanje brezpilotnega letala, odprtokodna, kar uporabnikom omogoča popoln nadzor.
Aprila 2021 je Parrot uvedel program Bounty Program z YesWeHackom, prvo evropsko varnostno platformo za množice. S tem partnerstvom Parrot izkorišča obsežno raziskovalno skupnost YesWeHack na področju kibernetske varnosti, da bi odkrila možne ranljivosti v svojih dronih, mobilnih aplikacijah in spletnih storitvah.
Program Bug Bounty Program je sestavljen iz dveh faz:
Zasebni programi sprva ponujajo izključni dostop izbranim raziskovalcem varnosti in vključujejo prihodnje modele brezpilotnih letal Parrot. Izkušnje in raznolike sposobnosti raziskovalcev bodo potrdile visoko raven varnosti izdelkov, preden gredo na trg, kar bo pripomoglo k izboljšanju varnosti uporabnikov Parrot in zaščiti njihovih podatkov.
Po tem prvem krogu zasebnega programa Bug Bounty in po komercializaciji izdelki gredo v javni program. Njihovo varnost nato strogo preverja celotna skupnost YesWeHack z več kot 22.000 raziskovalci kibernetske varnosti.

Upravljanje podatkov
Parrot Cloud omogoča uporabnikom, ki se odločijo za skupno rabo svojih podatkov, upravljanje podatkov o letih in floti ter večpredstavnost podatke, ki so jih prejeli njihovi droni.
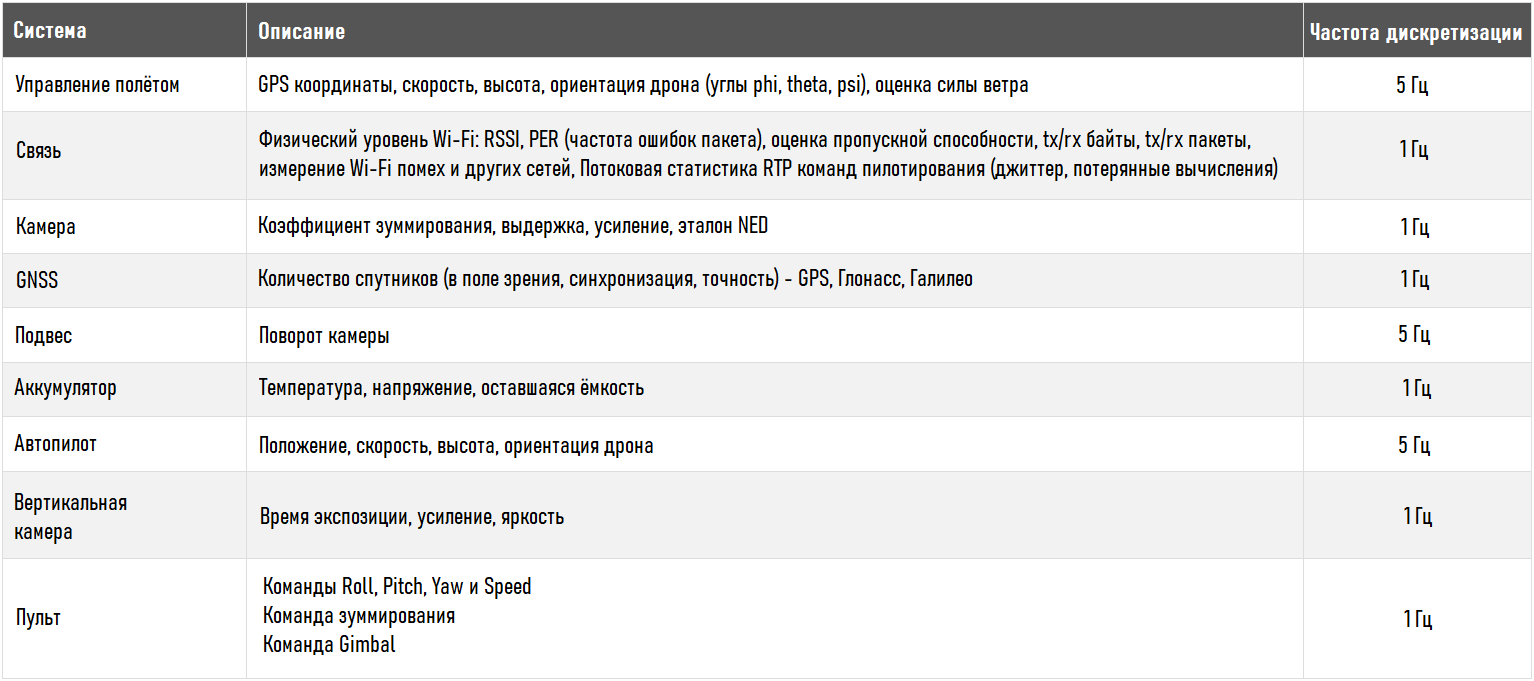
Zbrani podatki
Parrot Cloud zbira 4 vrste podatkov:
Statični (podatki o izdelku):
- Letala serijska številka
- Serijska številka baterije
- Različica vdelane programske opreme za letala in baterije
- Različica strojne opreme za letala in baterije
- Model naprave
- Izdaja FreeFlight 7 Različica
Dogodki
- Opozorila: Baterija, avtopilot, senzorji
- Komunikacija: poveži / odklopi, začetek pretakanja, opozorilo na motnje, šibek signal
- Kamera: pretočna statistika, spremembe nastavitev
- Let: sprememba stanja (vzlet, pristanek, lebdenje itd.), aktiviranje letalske naloge (načrt leta, fotogrametrija)
"Kontekstualne slike"
- Časovni posnetek- posnetek in (enkrat na 2 minuti)
- poglobljeno učenje (kartiranje več predmetov, pokrajin za izboljšanje avtonomije letenja, sledenje, izogibanje oviram)
- stereovizija (zemljevid globine)
- Sprožene slike po dogodku
- Začetek in konec natančnih stavkov lebdenja, natančno pristajanje
- Drone trčenje
- Obrazi se med prenosom samodejno zameglijo
Telemetrija
Končna uporaba zbranih podatkov
Parrot zbira in uporablja samo podatke strank, ki so se strinjale, da jih bodo delile, da bi izboljšale kakovost svojih izdelkov...
Upravljanje vzdrževanja
Preventivno vzdrževanje: Naša orodja zbirajo vse podatke, povezane z misijami (vrsta misije, čas vzleta in pristanka, število misij, lokacija brezpilotnih letal, hitrost letenja, načrt leta in nastavitve AirSDK). To vam omogoča, da v realnem času prejmete natančne informacije o stanju flote brezpilotnih letal ANAFI Ai (pa tudi njihovih krmilnikov in baterij).
Korektivno vzdrževanje: Zbrani podatki so uporabni za hitro določanje stanja določenega drona ali baterije.
Izboljšanje umetne inteligence (AI)
Elementi AI ANAFI Ai (PeleeNet, konvolucijska omrežja itd.) Ponujajo uporabnikom neprimerljive storitve in funkcije: izogibanje oviram, sledenje ciljem, več načinov letenja. Kakovost AI je odvisna od količine in kakovosti zbranih podatkov (slik in videoposnetkov): ti podatki spodbujajo strojno učenje. V tem pogledu kakovost podatkov ni edini odločilni element: metapodatki, povezani s temi podatki, so tudi temeljni. Zato naše orodje redno zbira slike in metapodatke, odvisno od dogodkov, skupaj od 30 do 50 MB na minuto.
Značilnosti letenja
Aerodinamične značilnosti
Pogoni in aerodinamika
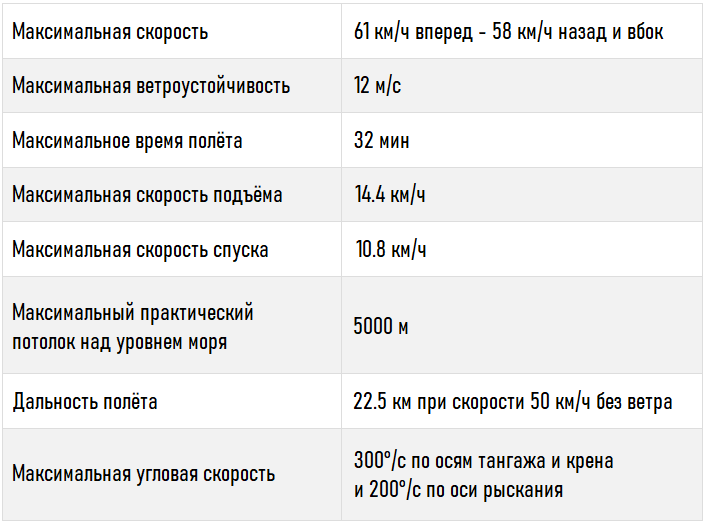
 CFD slika lopatic propelerjev ANAFI Ai
CFD slika lopatic propelerjev ANAFI Ai
Nove lopatice propelerja iz biomimikrije z grbavimi kiti. Ta pristop je omogočil povečanje pogonskega izkoristka elektrarne, ki je na izhodu zagotovila povečanje potiska pri enaki hitrosti vrtenja. Ta učinek je primerljiv s povečanjem premera rotorja.
Zmanjša se tudi zvočni hrup, zlasti tonski, ki izhaja iz sprednjega roba. Zato je ANAFI Ai tišji [71,5 dB SPL (A) na 1 m] kot Skydio 2 [76,4 dB SPL (A) na 1 m].
- Čas letenja več kot 32 minut
- Zaradi optimiziranih aerodinamičnih značilnosti trupa trupa in pogonskega sistema ANAFI Ai je največja hitrost pri letenju naprej 61 km / h, pri stranski let in let nazaj 58 km / h
- Maks. odpornost proti vetru 12,7 m / s.
- Zaradi velike učinkovitosti navora motorja / propelerja in visoke avtonomije akumulatorja je doseg 22,5 km (pri stalni hitrosti 50 km / h v mirnem vremenu).
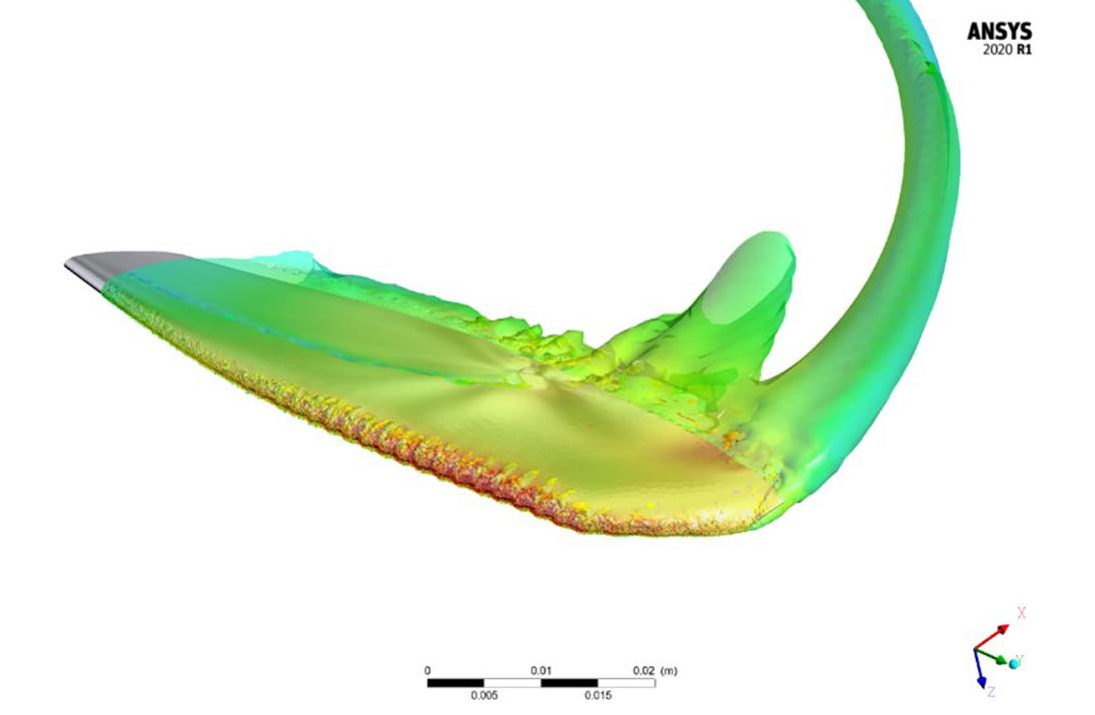
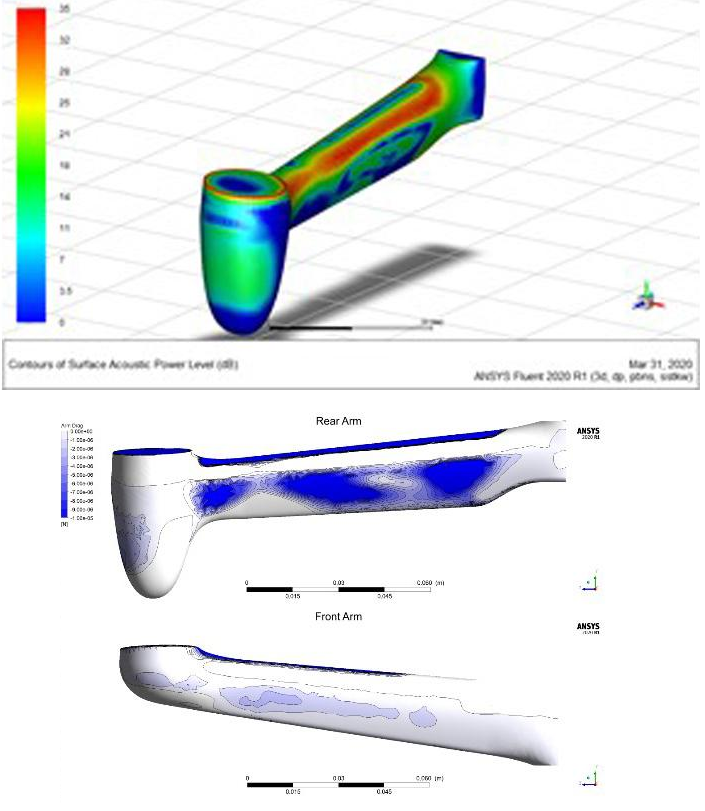 CFD slike žarkov ANAFI Ai
CFD slike žarkov ANAFI Ai
Senzorji
Za zagotovitev varnega leta ANAFI Ai je opremljen z:
- 2 × IMU (ICM-40609-D in ICM42605)
- Magnetometer LIS2MDL
- GPS modul UBX-M8030
- TI OPT3101 čas letenja (ToF)
- Barometer LPS22HB
- Navpična kamera
Značilnosti senzorja
IMU leta: ICM-40609-D
- 3-osni žiroskop
- Domet: ± 2000 ° / s
- Ločljivost: 16,4 LSB / ° / s
- Odmik / natančnost: ± 0,05 ° / s (po toplotni in dinamični kalibraciji)
- 3-osni merilnik pospeška
- Domet: ± 16 g
- Ločljivost: 2,048 LSB / mg
- Odmik / natančnost: ± 0,5 mg (XY) ± 1 mg (Z) (po termični in dinamični kalibraciji)
- Nadzor temperature s: krmiljen ogrevalni sistem glede na temperaturo okolja, stabiliziran v: ± 0,15 ° C
- Merilna frekvenca: 2 kHz
Magnetometer: LIS2MDL
- Razpon: ± 49,152G
- Ločljivost: 1,5 mG
- Odmik / natančnost: ± 15 mG (po kompenzaciji pri največji hitrosti motorja)
- Merilna frekvenca: 100 Hz
Barometer: LPS22HB 1
- Razpon: 260 do 1260 hPa
- Ločljivost: 0,0002 hPa
- Odmik / natančnost: ± 0,1 hPa
- Nadzor temperature: krmiljen sistem ogrevanja glede na temperaturo okolja, stabiliziran v: ± 0,2 ° C
- Merilna frekvenca: 75 Hz
- Hrup pri merjenju: 20 cm RMS
GNSS: UBX-M8030 1
- Antena s keramiko 25 × 25 × 4 mm, omogoča izboljšanje 2 dB ojačanja v primerjavi z ANAFI 1
- Občutljivost: hladni zagon -148 dBm / sledenje in navigacija: -167 dBm
- Čas do prvega popravka: 40 sekund
- Natančnost / natančnost: Položaj (standardni odklon 1,4 m), Hitrost (standardni odklon 0,5 m / s)
Navpična kamera
- Senzor slike format: 1/6 palca
- Ločljivost: 640 × 480 slikovnih pik
- Slikovni senzor z globalnim zaklopom
- Črno -belo
- FOV: Vodoravni vidni kot: 53,7 ° / navpični vidni kot: 41,5 °
- Goriščna razdalja: 2,8 mm
- Merjenje hitrosti optičnega toka na tleh pri 60 Hz
- 15Hz in natančno prileganje @ 5Hz
ToF: TI OPT3101
- Domet: 0-15m
- Ločljivost: 0,3 mm
- Natančnost b: ± 2 cm (po umerjanju)
- Merilna frekvenca: 64 Hz
Navpična kamera IMU: ICM-42605
- 3-osni žiroskop
- Območje: ± 2000 ° / s
- Ločljivost: 16,4 LSB / ° / s
- Odmik / natančnost: ± 0,1 ° / s (po dinamiki Kalibracija)
- 3-osni merilnik pospeška
- Razpon: ± 16 g
- Ločljivost: 2,048 LSB / mg
- Odmik / natančnost: ± 2,0 mg (XY) ± 5,0 mg (Z) - po dinamični kalibraciji
- Merilna frekvenca: 1 kHz
- Strojna sinhronizacija z navpično kamero, natančnost: 1 μs
Avtopilot
Krmilnik letenja ANAFI Ai omogoča preprosto in intuitivno pilotiranje: za upravljanje ni potrebno usposabljanje. Omogoča vam avtomatizacijo številnih načinov letenja (načrt letenja, snemalec, ročni vzlet, Smart RTH). Algoritmi zlitja senzorjev združujejo podatke iz vseh senzorjev za oceno razmerja ANAFI Ai, nadmorske višine, položaja in hitrosti.
Ocena stanja je bistvena za pravilno delovanje brezpilotnih letal. Štirikopterji so sami po sebi nestabilni, če se krmilnik leta uporablja z odprto zanko; za enostavno upravljanje, da ne omenjam avtonomnega krmiljenja, jih je treba stabilizirati z uporabo algoritmov upravljanja z zaprto zanko. Ti algoritmi izračunajo in pošljejo ukaze motorjem, ki jih ANAFI Ai potrebuje za dosego želenih poti.

Let v zaprtih prostorih
Ker ni signala GPS, se ANAFI Ai pri ocenjevanju hitrosti in položaja opira predvsem na meritve navpične kamere. Učinkovitost navpične kamere določata dva glavna algoritma:
- Optični tok za oceno hitrosti
- Zaznavanje in ujemanje ključnih točk za oceno položaja
Navpična kamera algoritmi lahko delujejo v slabih svetlobnih pogojih zahvaljujoč ANAFI Ai, opremljenemu s parom LED luči, ki se nahajajo poleg navpične kamere. Omogočajo, da dron ostane stabilen, zlasti med letenjem v zaprtih prostorih ali brez GPS -ja, na nadmorski višini manj kot 5 m nad tlemi. Moč LED luči se samodejno prilagodi, odvisno od potreb algoritma.
Avtonomni let
Ključne značilnosti
- Rotacijski sistem zaznavanja s širokim vidnim poljem
- Izvlečenje globine okoliškega prostora na podlagi stereo poravnave in globine s premikom
- Predstavitev okolja v obliki polnilne mreže
- Avtonomno odkrivanje in izogibanje oviram pri hitrosti do 29 km / h
To poglavje podrobno opisuje senzorje, strojno opremo in algoritme, ki jih uporablja ANAFI Ai za omogočanje avtonomnega leta. Organiziran je na naslednji način:
- Podroben opis sistema zaznavanja ANAFI Ai
- Perceptivni algoritmi, ki se uporabljajo za rekonstrukcijo 3D okolja, ki obdaja brezpilotne letalnike
- Prerazporeditev in ovira izogibanje

Strategija sistema zaznavanja
Dojemanje tridimenzionalnega okolja je ključna sposobnost za doseganje avtonomnega leta, zlasti v zaprtih prostorih. To je predpogoj za zagotovljeno odkrivanje in izogibanje oviram, kar zmanjšuje obremenitev upravljavca drona, povečuje uspeh misije in zagotavlja varnost letala.
Sprostitev celotnega potenciala leteče kamere, ki se lahko brez omejitev prosto premika in vrti v vse smeri, zahteva učinkovito rešitev zaznavanja. Zlasti zaznavni sistem bi moral biti sposoben prejemati informacije o okolju v smereh, ki ustrezajo gibanju naprej med letom - ne glede na usmerjenost kamere.
ANAFI Ai se za ločitev orientacije glavne kamere in sistema zaznavanja opira na edinstveno tehnično rešitev, ki temelji na dveh mehanskih gimbalih:
- Glavna kamera je nameščena na 3- osi kardan, zaradi česar je 3D orientacija neodvisna od orientacije drona.
- Senzorski sistem je nameščen na enosmernem kardanskem vzvodu - povezan z gibanjem brezpilotnega letalnika, ki ga je mogoče usmeriti v katero koli smer.
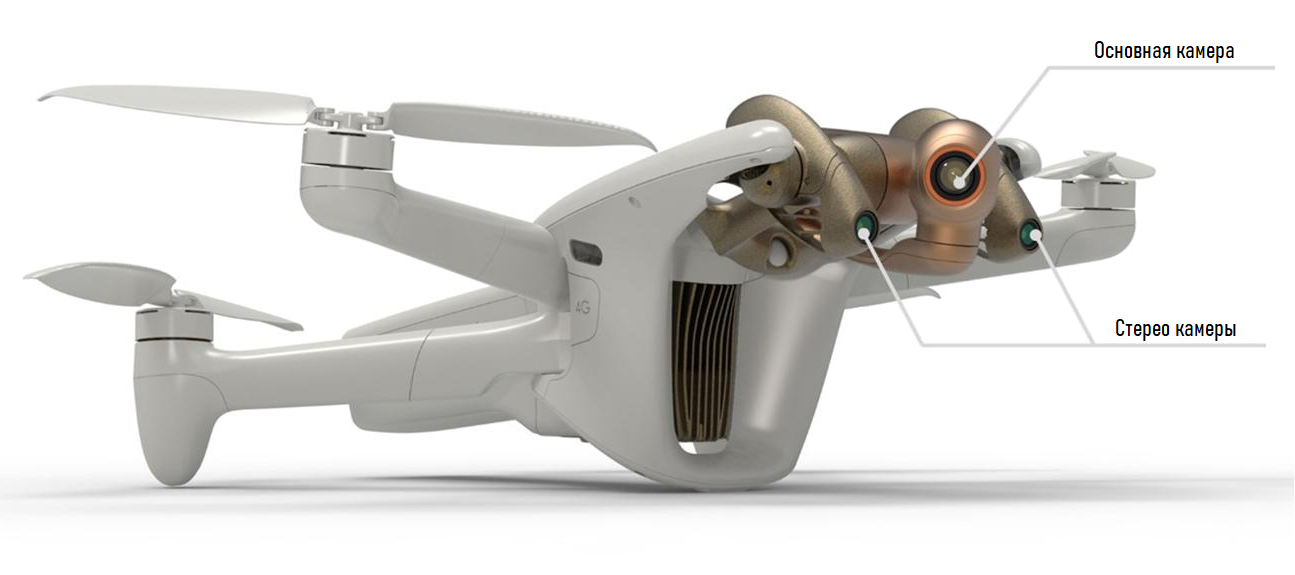 Dvojni stabilizator ANAFI Ai za zaznavanje in vizualizacijo.
Dvojni stabilizator ANAFI Ai za zaznavanje in vizualizacijo.
Nagibne osi obeh obešalnikov so kolinearne in združene, da dosežejo ultra kompaktno zasnovo.
Zahvaljujoč tej rešitvi je mogoče usmeriti glavno kamero in zaznavni sistem v dve različni smeri. Ta zasnova se izogiba uporabi dragih kamer na straneh, zgoraj, spodaj in zadaj drona, hkrati pa še vedno zagotavlja veliko razpoložljivo vidno polje za sistem zaznavanja.
Ta razdelek je organiziran na naslednji način:
- Podrobnosti o senzorjih, ki se uporabljajo za zaznavni sistem
- Specifikacije tako za kardansko ohišje glavne kamere kot za sistem za zaznavanje gimbala
- Strategije ciljanja na sistem zaznavanja za izkoriščanje potenciala strukture dvojnega vzmetenja
Senzorji
Sistem zaznavanja temelji na paru enakih kamer z eno osjo nagiba...
 1-osni mehanski tečaj za sistem zaznavanja ANAFI Ai.
1-osni mehanski tečaj za sistem zaznavanja ANAFI Ai.
Specifikacije senzorja so naslednje:
- Model: Onsemi AR0144CSSM28SUD20
- Barva: enobarvno
- Ločljivost: 1280 × 800 slikovnih pik
- Hitrost sličic: 30 fps
- Globalni zaklop
- Celotno vodoravno vidno polje: 118 ° (110 ° uporabno za zaznavanje)
- Celotno navpično vidno polje: 72 ° (62 ° uporabno za zaznavanje)
- Goriščna razdalja: 1,47 mm (0,039 palcev - 492,94610 slikovnih pik)
- Odprtina: f / 2,7
stereo pari so naslednji:
- Os skupne višine
- Osnovna / razdalja: 62 mm (2,44 palca)
- Sinhroni zajem pri 30 sličicah na sekundo

Dvojni kardan
Mehanski kardan glavne kamere je 3-osni mehanski smolnik l -yaw "z naslednjimi značilnostmi:
- Omejevalniki nagiba: -116 ° / 176 °
- Omejevalniki zvitka: / -36 °
- Omejevalniki nagiba: / - 48 °
Mehansko vzmetenje zaznavnega sistema je enoosno vzmetenje z naslednjimi značilnostmi:
- Končni upori v koraku: -107 ° / 204 °
- Čas potovanja od enega konca do drugega: 300 ms
Senzorski sistem ima 311 ° premika (od tega telo brezpilotnega letala ne zakrije 296 °), kar omogoča nazaj zaznavanje.
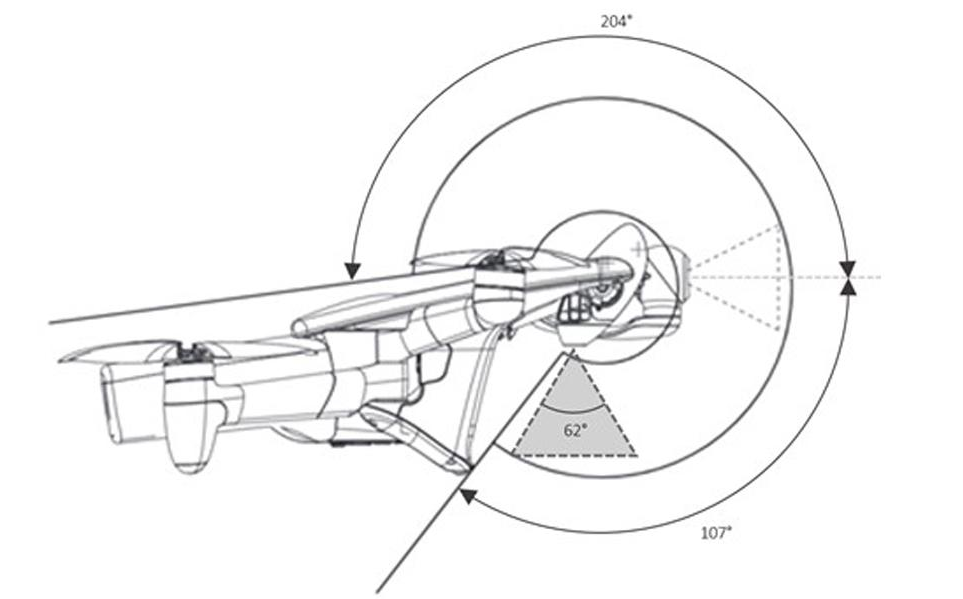
Takojšnje navpično vidno polje in omejevalni sistemi zaznavanja ANAFI Ai.
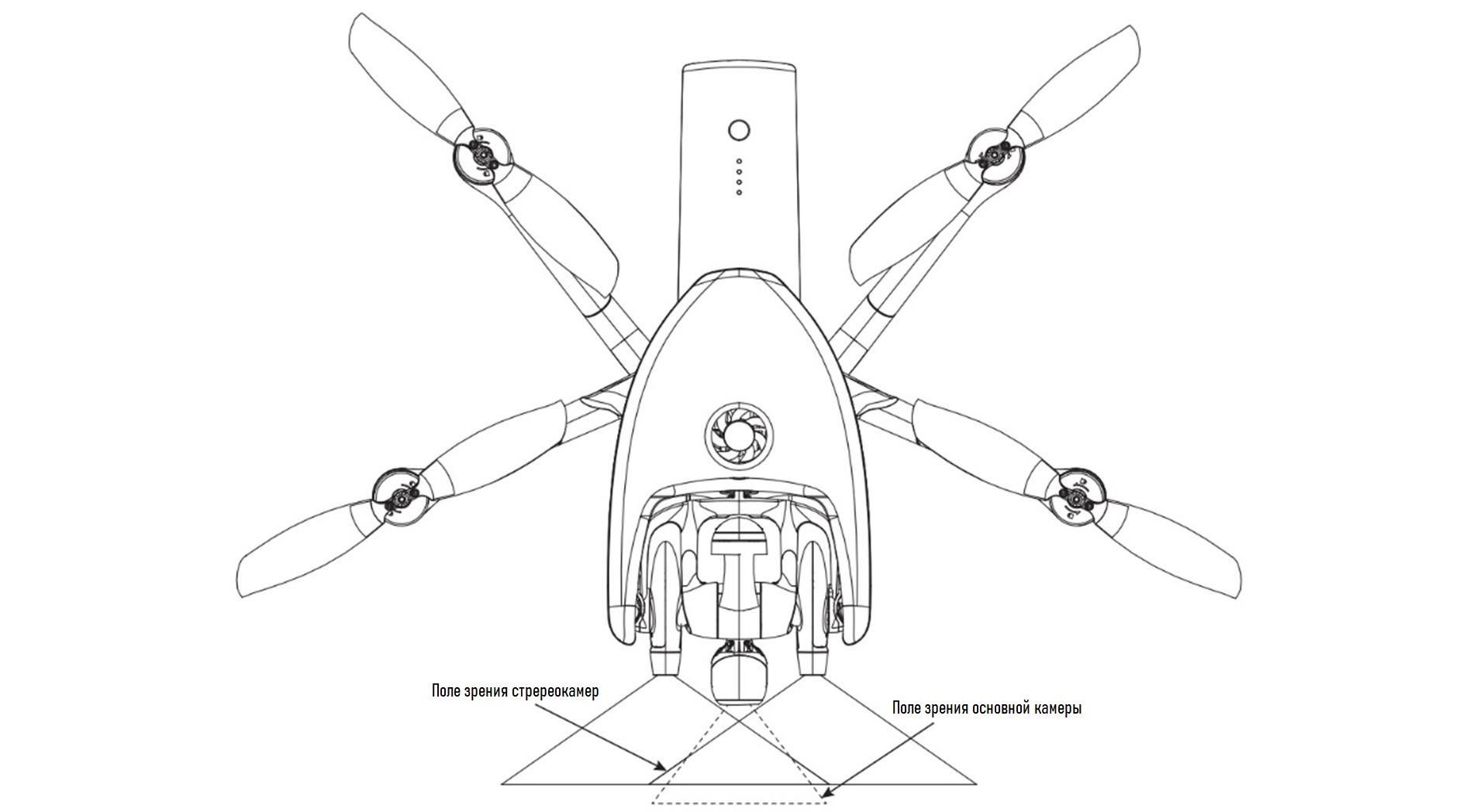
Sistem je bil zasnovan tako, da:
- Lopatice propelerja ne vstopajo v vidno polje glavne kamere
- Glavna kamera ne pokriva vidnega polja zaznavnega sistema
- Glavno kamero in zaznavni sistem je mogoče v celoti zložiti nazaj, da zaščiti leče
 Vodoravno vidno polje sistema zaznavanja ANAFI Ai.
Vodoravno vidno polje sistema zaznavanja ANAFI Ai.
Ko se nagnete nazaj, se sistem zaznavanja premakne v zgornji položaj in s tem zagotovi jasen pogled.
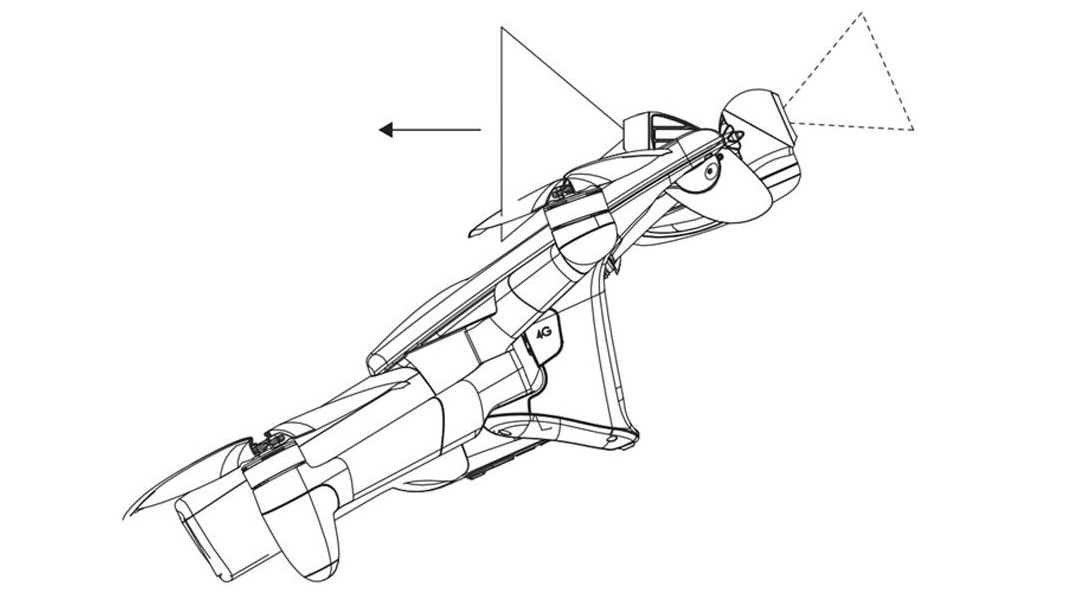
Zaznavanje ANAFI Ai v popolnoma ležečem položaju za let nazaj.
Obnova okolja
Rekonstrukcija okoliškega tridimenzionalnega okolja za avtonomni let se izvaja v dveh stopnjah:
- ) Izvlečenje informacij o globini iz zaznavanja v obliki zemljevidov globine
- Združevanje podatkov zemljevidov globine v tridimenzionalno mrežo zapolnitve
Za pridobivanje zemljevidov globine iz senzorjev zaznavanja uporabljamo dve metodi:
- Globina glede na stereo poravnavo
- Globina od gibanja
Globina iz stereo korespondence
Glavna metoda pridobivanja globine informacije temeljijo na paralaksi med dvema stereo kamerama zaznavnega sistema. S fotografiranjem okolja v eni smeri, vendar z dveh različnih položajev, se predmeti v vidnem polju zaznavnega sistema pojavljajo v različnih položajih na slikah, ki jih dobita dve kameri. Bližje ko je motiv, večja je razlika v položaju.
Tako je strategija določiti točke na slikah, pridobljene z levo in desno stereo kamero, ki ustrezajo istemu objektu v vidnem polju zaznavnega sistema, in izmeriti razliko v položaju teh točk na obeh slikah. Ta razlika se imenuje neskladje in se meri v številu slikovnih pik.
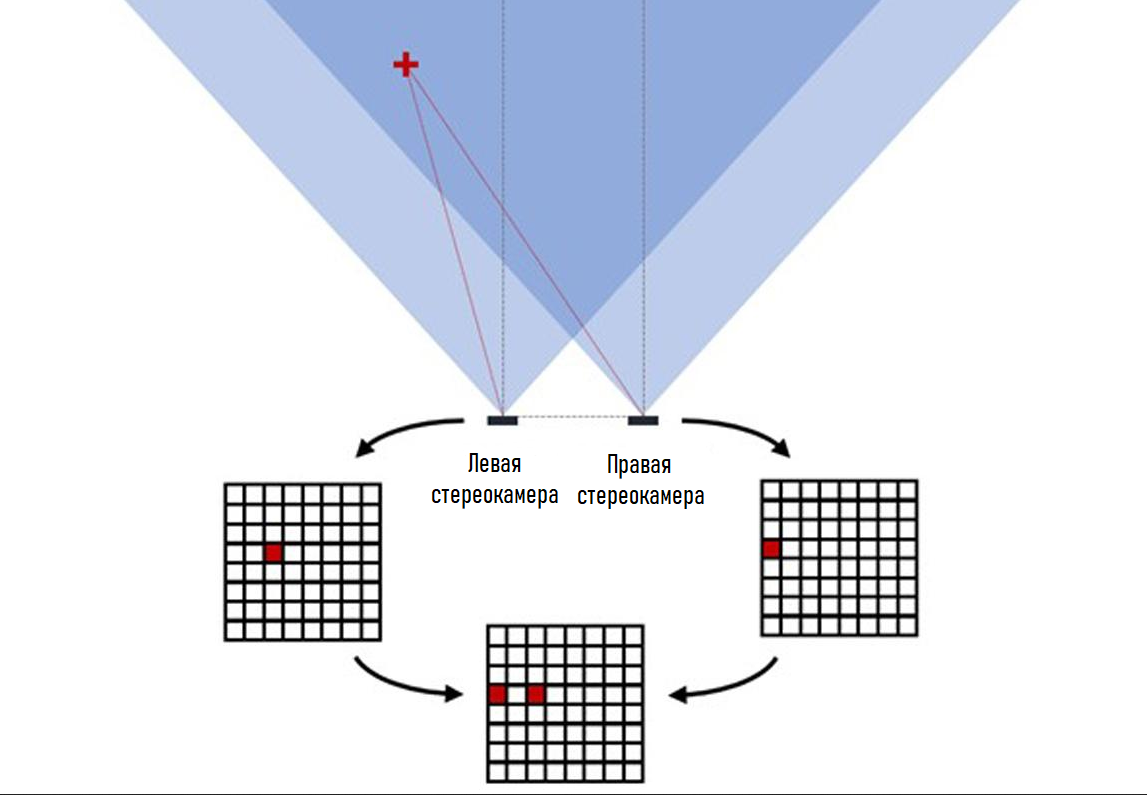 Ilustracija načela stereo vida - rdeča 3D točka je v različnih položajih na levi in desni sliki.
Ilustracija načela stereo vida - rdeča 3D točka je v različnih položajih na levi in desni sliki.
Razlika je lahko nato povezana z globino vsake od teh točk z uporabo naslednje globine razmerja = žariščna * izhodiščna vrednost / neskladje, kjer sta globina in izhodiščna vrednost izraženi v istih enotah, ter žariščno dolžina in razlika sta izraženi v številu slikovnih pik.
Rezultat izračuna je v obliki zemljevida globine 176 × 90 slikovnih pik, pri katerem vrednost vsakega piksla ustreza globini v metrih. Zemljevid globine je osvežen pri 30 Hz.
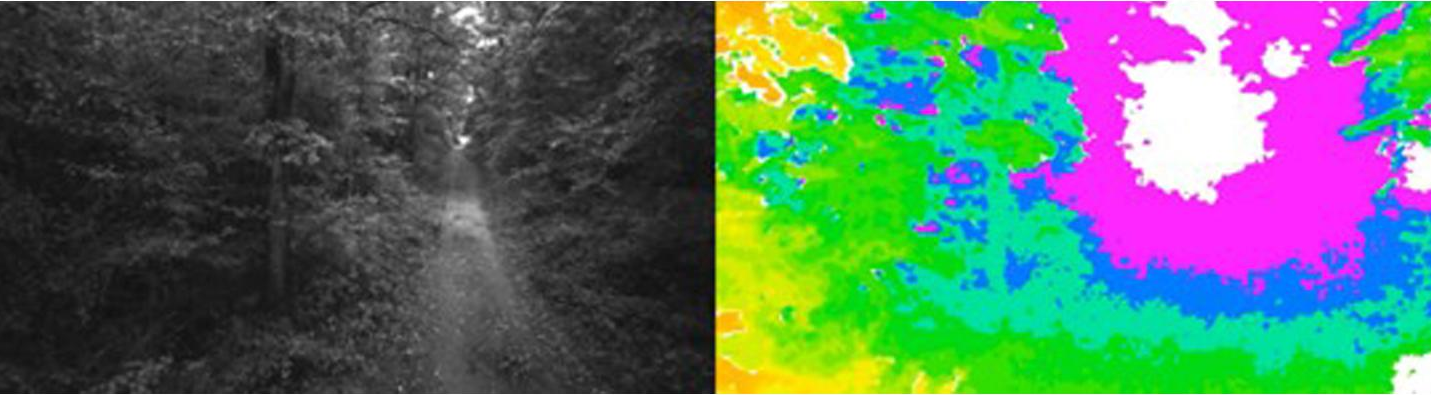
Primer slike, posnete z desno kamero sistema zaznavanja ANAFI Ai (levo), in ustrezno globino, pridobljeno s stereo slikanjem (desno). Barvni zemljevid sega od rdeče (bližje) do vijolične (dlje) - bela pomeni Izven dosega.
Takojšnji rezultat tega je, da je globina, izmerjena s to metodo, diskretizirana, saj lahko neskladje sprejme le diskretne vrednosti (število slikovnih pik). Točka 3D, ki je dovolj oddaljena od zaznavnega sistema in ustvarja teoretično dispariteto manj kot en slikovni pik, se bo štela za neskončno, saj bo ustrezna dejanska diskretna razlika enaka 0. Natančnost metode stereo primerjave se zmanjšuje z naraščajočo razdaljo, čeprav obstaja so metode, ki lahko zmanjšajo ta pojav z vzorčenjem podpikslov.
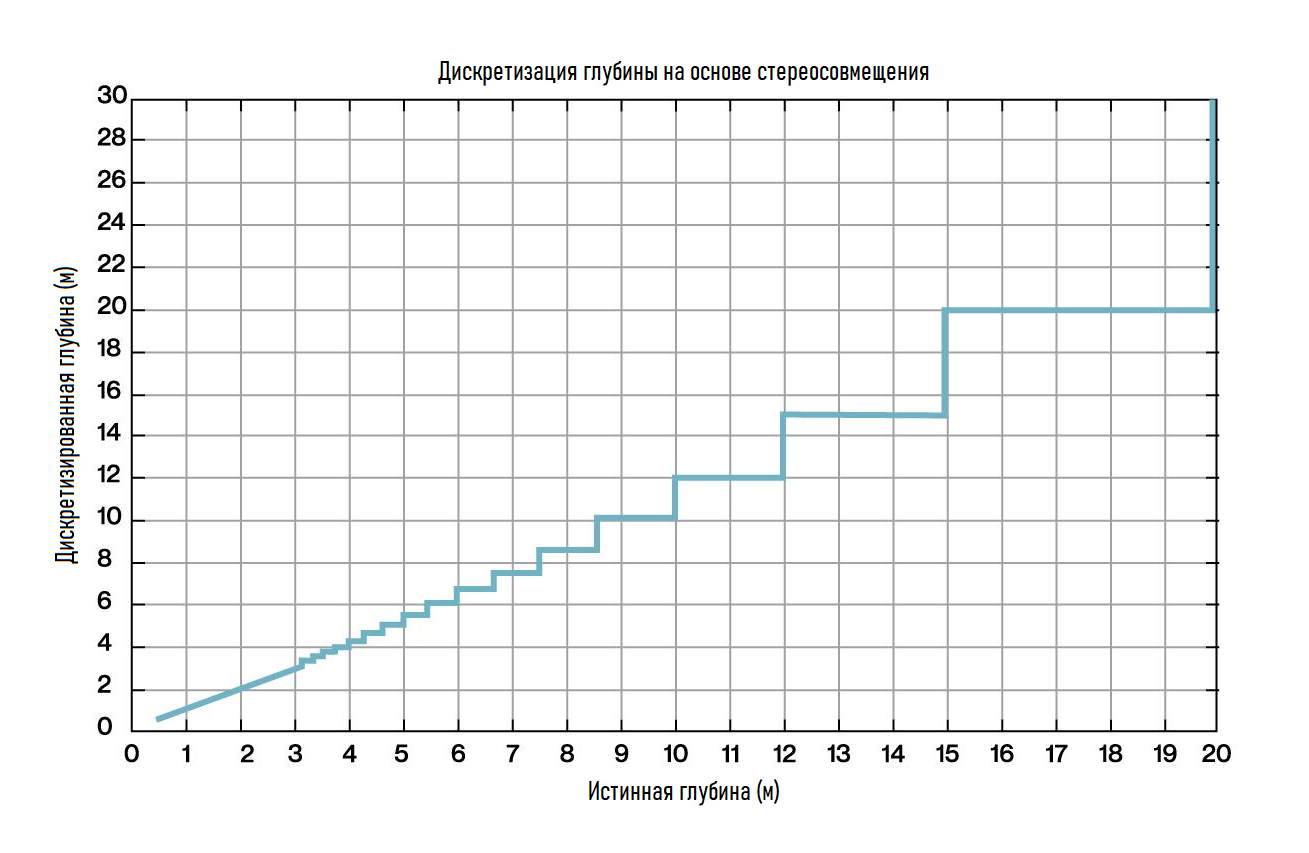 Diskretizirana globina, merjena s "stereo poravnavo" v primerjavi z "resnično globino".
Diskretizirana globina, merjena s "stereo poravnavo" v primerjavi z "resnično globino".
Poleg tega se razlika razlikuje, ko se globina približa ničli. Ker je število slikovnih pik na slikah omejeno, je omejena tudi razlika. Posledično obstaja minimalna globina, na kateri je sistem zaznavanja slep. Ta najmanjša globina je 36 cm za ANAFI Ai.
O umerjanju: Vsak par stereo kamer je tovarniško umerjen, da natančno izmeri majhna odstopanja, ki lahko obstajajo med obema kamerama, in jih kompenzira pri izračunih globine na vozilu.
Uporabnik lahko s pomočjo preskusnega vzorca, ki je priložen brezpilotnemu letalu, ponovno umerite par stereo kamer. Zlasti do neke mere lahko dron zazna potencialne napake pri umerjanju, ki se lahko pojavijo v njegovem življenju. V tem primeru jih bo programska oprema letala poskušala prilagoditi in kompenzirati, če pa to ne uspe, se prikaže obvestilo, ki vas prosi za ponovno kalibracijo.
Globina gibanja
Gibanje brezpilotnega letala se lahko uporablja tudi za zbiranje slik okolja iz različnih zornih kotov in s tem rekonstruiranje informacij o globini. Ta tehnika se imenuje globina zaradi gibanja ali monokularno zaznavanje, ker ena sama premikajoča se kamera zadošča za zbiranje informacij o globini.
Načelo delovanja je podobno stereo viziji, vendar namesto da bi primerjali podobe okolja, ki so jih hkrati dobili različni opazovalci, zaznavanje primerja slike okolja, ki jih je isti opazovalec dobil v različnih časih. Če se dron premika, bodo slike tega edinstvenega opazovalca posnete iz različnih zornih kotov. Če poznamo položaj, v katerem je bil posnet vsak okvir, je mogoče na različnih slikah triangulirati točke, ki ustrezajo isti funkciji, in jih vrniti v 3D.
Izhod je tridimenzionalni oblak točk, ki vsebuje do 500 točk za ANAFI Ai, ustvarjen pri frekvenci 10 Hz.
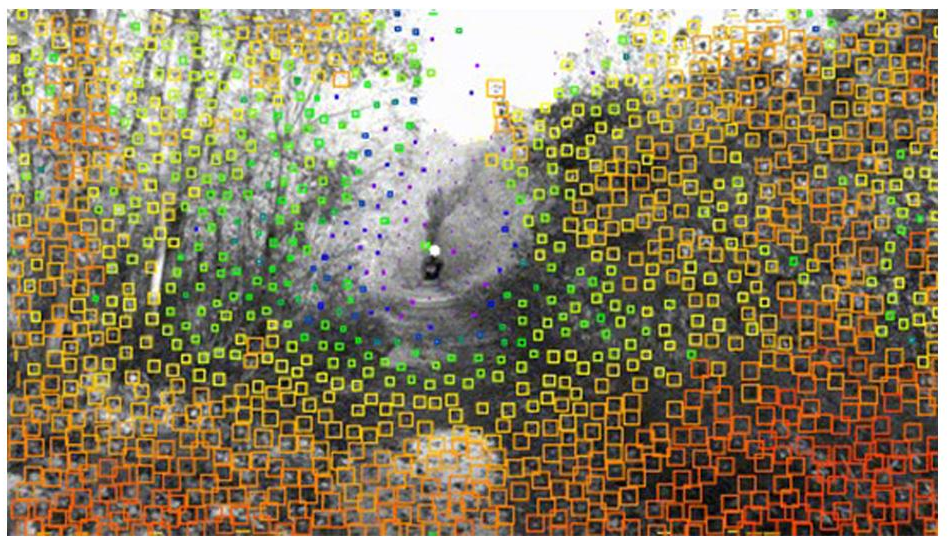 Primer oblaka točk, ustvarjenega na podlagi globine gibanja - barvni zemljevid gre od rdeče (bližje) do vijolične (dlje).
Primer oblaka točk, ustvarjenega na podlagi globine gibanja - barvni zemljevid gre od rdeče (bližje) do vijolične (dlje).
Algoritem ANAFI Ai Motion Depth običajno ustvari manj informacij (redki oblak točk) kot algoritem stereo ujemanja in zahteva, da se drone premakne za zbiranje informacij. Poleg tega ta algoritem ne more izvleči informacij v natančni smeri gibanja (vsaj za oddaje v živo), saj so predmeti na slikah v tej smeri skoraj stacionarni (fokus širitve).
Vendar ima boljše območje zaznavanja (teoretično neskončno) kot stereo ujemanje.
Fill Grid
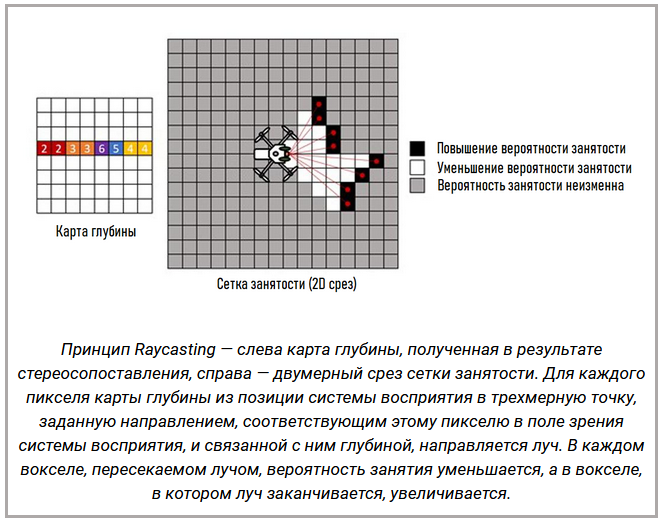
Podatki o globini iz stereo in monokularnih algoritmov zaznavanja so integrirani v Mrežo za polnjenje. Ta mreža vzorči 3D okolje v 3D kocke, imenovane vokseli. Vsakemu vokselu je dodeljena verjetnost, da ga ovira zasede ali, nasprotno, prosta ovira.
Algoritem prenosa žarkov se uporablja za integracijo informacij o globini v mrežo za polnjenje. Za vsak piksel zemljevida globine, pridobljen kot rezultat stereo primerjave, se pretvori v tridimenzionalno točko, za vsako točko oblaka točk pa v globino, pridobljeno kot rezultat gibanja:
- V mrežo za polnjenje se vleče žarek od položaja zaznavnega sistema do položaja 3D točke.
- Verjetnost, da bo voksel, ki vsebuje 3D -točko, zasedena, se poveča.
- Verjetnost, da bodo zasedeni vsi vokseli, ki jih prečka žarek, razen tistega, ki vsebuje točko 3D, se zmanjša.
Tako mreža deluje kot časovni filter za informacije o globini, ki absorbira morebitne šume pri merjenju globine in kot spomin na prejšnje meritve. krmarite po težkih okoljih, tudi če ni stalnega 360 ° vidnega polja sistema zaznavanja.
 Primer polnilne mreže. Vokseli so nameščeni na desnem pogledu stereo kamere z veliko mero gotovosti, da so zaposleni, od rdeče (blizu) do vijolične (daleč).
Primer polnilne mreže. Vokseli so nameščeni na desnem pogledu stereo kamere z veliko mero gotovosti, da so zaposleni, od rdeče (blizu) do vijolične (daleč).
Polnilna mreža je osnova za algoritme načrtovanja gibanja, ki jih uporablja ANAFI Ai za avtonomni let in izogibanje oviram.
Izogibanje oviram
Zahvaljujoč poznavanju 3D okolja brezpilotnega letala, shranjenega v mreži za polnjenje, se lahko ANAFI Ai izogne oviram. To zagotavlja znatno dodatno varnost pri avtonomnih misijah, uporabno pa je tudi pri ročnem letu, še posebej, če je vidna linija med pilotom in brezpilotnim letalom oslabljena.
Vsakih 30 ms ANAFI Ai napoveduje, kakšno bo nominalno kratko časovno obdobje v prihodnosti. Ta napoved se sklepa na podlagi povezav, ki jih je predložil uporabnik, pa naj gre za ukaze letenja z daljinskega upravljalnika, točke poti za priklop na načrt leta ali vhodno pot. Nato z uporabo simuliranega modela notranjega brezpilotnega letala algoritem prerazporeditve izračuna najmanjše možne popravke te predvidene nazivne poti, zaradi česar je brez trka in izvedljivo za brezpilotni letalnik.
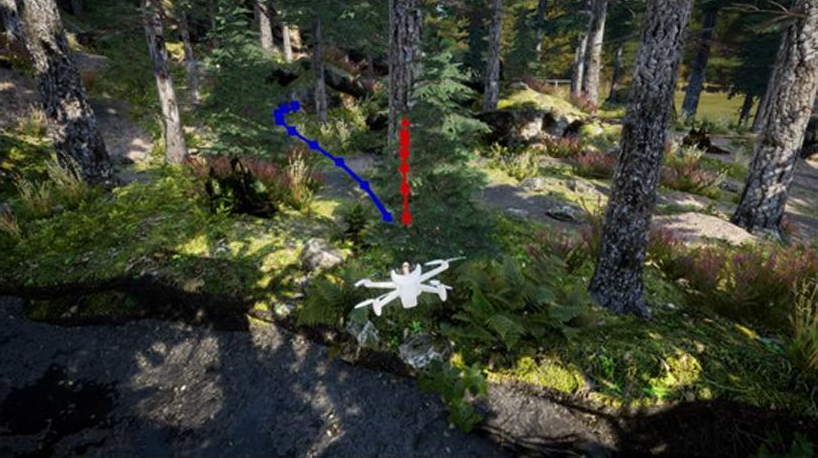 Primer popravljene poti, izračunane z algoritmom za izogibanje oviram kot odziv na trk referenčne poti z drevesom.
Primer popravljene poti, izračunane z algoritmom za izogibanje oviram kot odziv na trk referenčne poti z drevesom.
Sistem za izogibanje oviram ANAFI Ai je bil zasnovan za delovanje pri hitrostih do:
- Raven letenja: 29 km / h
- Vzpon: 14 km / h
- Sestop: 11 km / h
Učinkovitost izogibanja je omejena v dežju ali močnem vetru, šibki svetlobi ali moteni satelitski navigaciji. Poleg tega se morate pred letenjem prepričati, da so leče senzorskega sistema čiste.
Letalske misije

Ključne lastnosti
Zrak SDK (glej. SDK) omogoča razvijalcem dostop do vsakega senzorja drona, kamere, vmesnika za povezovanje in samostojne funkcije. Zato lahko prilagodijo vedenje brezpilotnega letala, da ustvarijo misije letenja. Vsaka letalska misija vsebuje niz osnovnih vedenj ali načinov:
- Na tleh: Obnašanje, ko so motorji ustavljeni, npr. Kalibracija senzorja.
- Vzlet: različne strategije vzleta
- Lebdenje: drži fiksno točko
- Let: ročno funkcije in avtonomni let
- Pristanek: različne strategije pristanka
- Kritično: ob odkritju kritičnega stanja
Letalske misije po meri lahko ustvarijo nova vedenja ali jih ponovno uporabijo iz privzete misije.
Cena in razpoložljivost
Začetek prodaje brezpilotnega letala ANAFI Ai je predviden za september 2021. Podatki o cenah trenutno niso razkriti. Še naprej spremljamo vhodne informacije in bomo ta razdelek zagotovo posodobili pozneje.

Dokumentacija za prenos
Dokumentacija za spoznavanje izdelka od razvijalca:
- Prenesite celotno tehnično dokumentacijo od razvijalca
- Prenesite specifikacijo izdelka od razvijalca
Video posnetki
Najboljše ocene ANAFI Ai od razvijalca in uporabnikov
Razpakiranje in prvi let.
Testni let brezpilotnega letala na dosegu s povezavo 4G. Skupni čas letenja je bil 29 minut pri povprečni horizontalni hitrosti leta 58 km / h (16 m / s). V tem času je brezpilotni letnik uspel premagati 27 km. Opazite lahko tudi, da je let potekal v razmerah močnega vetra, na kar je sistem brezpilotnih letal stalno opozarjal.
.






