
- 1 مقدمة
- 2 المطور حول الجهاز
- 3 ميزات
- 4 حزمة المحتويات
- 5 المواصفات
- 5.1 طائرة بدون طيار
- 5.2 الاتصالات
- 5.3 نظام الملاحة
- 5.4 Skycontroller 4
- 5.5 بطارية الطائرة الذكية
- 5.6 التطبيق
- 5.7 الكاميرا
- 5.8 أوضاع الطيران المستقلة
- 5.9 الأمن السيبراني
- 5.10 Parrot SDK
- 6 المظهر
- 7 الاتصالات
- 7.1 4G
- 7.2 كحد أقصى. نطاق مع اتصال 4G
- 7.3 Wi-Fi
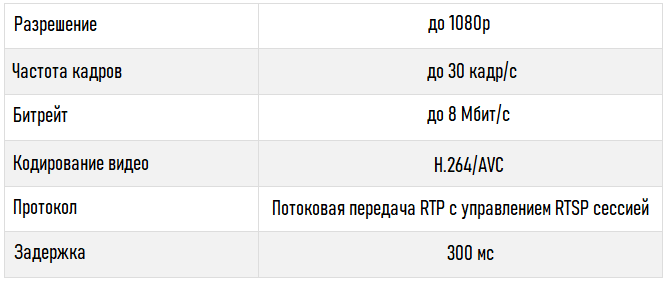
- 7.4 فيديو مباشر
- 8 الكاميرا
- 8.1 مصفوفة 48 ميجابكسل
- 8.2 العدسة
- 8.3 أوضاع الفيديو
- 8.4 ترميز الفيديو
- 8.5 HDR
- 8.6 أوضاع الصورة
- 9 التثبيت الهجين
- 9.1 انحراف الكاميرا الرئيسية
- 10 المسح التصويري
- 10.1 الفحص ورسم الخرائط [72)]
- 10.2 قدرات الذكاء الاصطناعي والجيل الرابع
- 10.3 الطيران المستقل
- 11 القياس التصويري أو الليدار
- 11.1 مزايا المسح التصويري
- 11.2 عيوب LIDAR
- 12 SDK
- 12.1 Air SDK
- 12.2 SDK الأرضي
- 12.3 OpenFlight
- 12.4 أبو الهول [92)]
- 12.5 أوليمب
- 12.6 PdrAW
- 12.7 نماذج C. A. D.
- 12.8 توافق MAVLink و GUTMA
- 13 أكبر نظام بيئي شريك لطائرات الببغاء بدون طيار
- 13.1 ببغاء لأي حاجة عمل
- 14 الأمن السيبراني
- 14.1 خصوصية البيانات
- 14.2 FIPS140 متوافق -2 ومعتمدة من CC EAL5 Secure Element
- 14.3 4G اتصال آمن ومصادقة قوية
- 14.4 التهيئة والترقية الآمنة
- 14.5 ضبط مفاتيح المستخدم على العنصر الآمن
- 14.6 الصور الموقعة رقمياً
- 14.7 التحقق من الشفافية والأمن المستمر مع مكافأة الأخطاء
- 15 إدارة البيانات
- 15.1 البيانات المجمعة
- 15.2 الاستخدام النهائي للبيانات المجمعة [1 26]
- 15.3 تحسين الذكاء الاصطناعي (AI)
- 16 خصائص الرحلة
- 16.1 الخصائص الديناميكية الهوائية
- 16.2 المحركات والديناميكا الهوائية
- 16.3 مستشعرات
- 16.4 خصائص المستشعر
- 16.5 الطيار الآلي
- 17 رحلة مستقلة
- 17.1 السمات الرئيسية
- 17.2 إستراتيجية نظام الإدراك
- 17.3 مستشعرات
- 17.4 تعليق مزدوج
- 17.5 إعادة بناء البيئة
- 18 مهمة طيران
- 18.1 الميزات الرئيسية
- 19 السعر والتوافر
- 20 تنزيل الوثائق
- 21 فيديو
مقدمة [16 4]
Parrot Anafi Ai هو حل فريد جديد تمامًا من مطور فرنسي مشهورالاستخدام التجاري
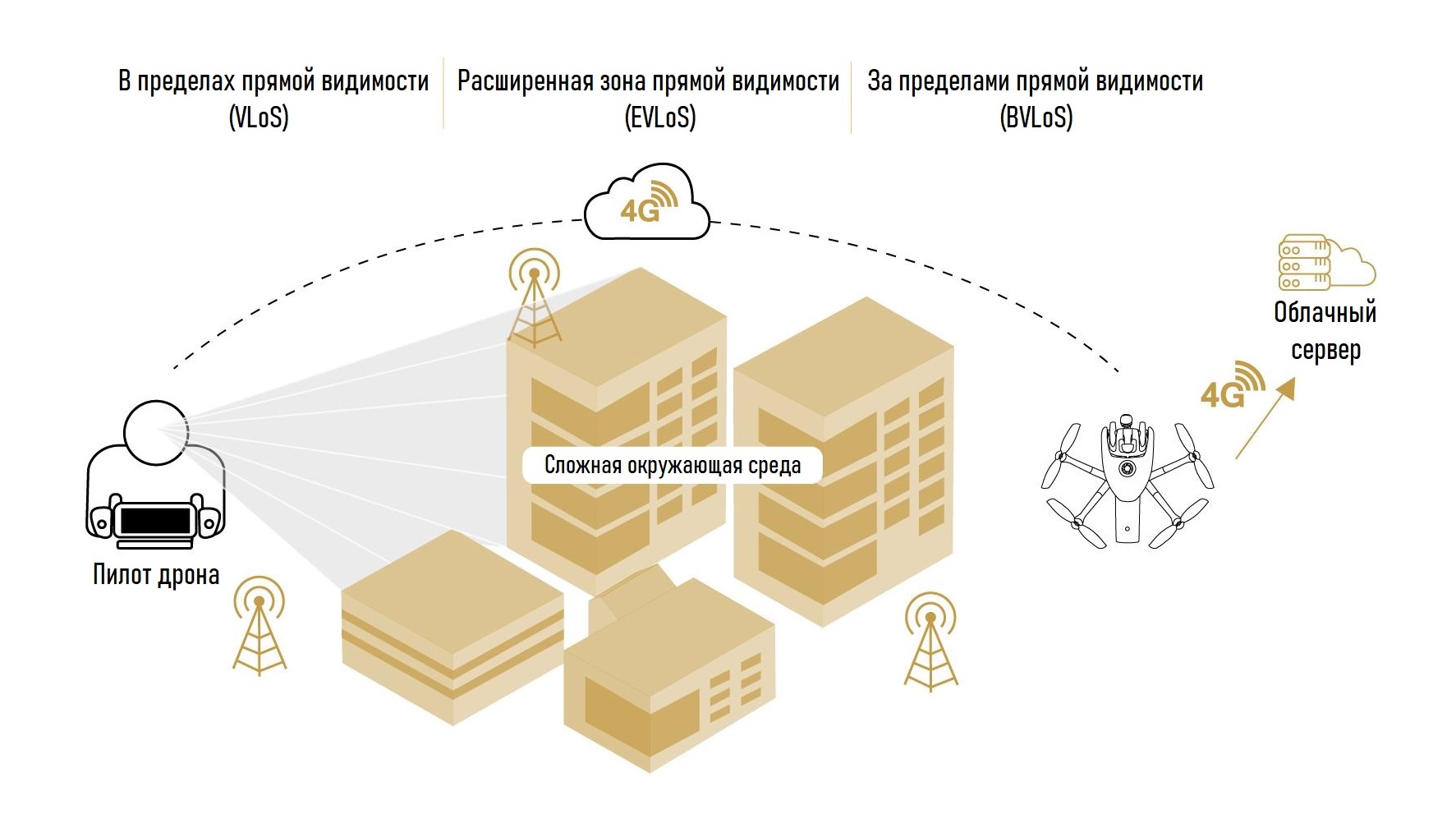
بطاقة الاتصال Anafi Ai هي وحدة 4G المضمنة ، بفضلها تمكنت الطائرة بدون طيار من استخدام الجيل الرابع من الاتصالات المحمولة كقناة رئيسية لنقل البيانات بين الطائرة بدون طيار ومعدات التحكم ، والتي في الواقع يزيل جميع القيود المفروضة على نطاق الرحلة ويحدد مسبقًا تشغيل الطائرة بدون طيار خارج خط الرؤية.بالنظر إلى المستقبل ، نلاحظ أن الإمكانات المعلنة للآلة كانت قوية بشكل لا يصدق وتتوافق أكثر من أي وقت مضى مع مظهرها المستقبلي ، المستوحى من الطبيعة لإنشاء مهندسين فرنسيين.
مطور السيارة
مارتن لين ، مدير التسويق في باروت، لم تقدم طائرات الببغاء بدون طيار

الميزات
الملامح الرئيسية لببغاء Anafi Ai:
- الوزن 898 جرامًا
- وقت الطيران 60 ثانية
- تصميم فريد قابل للطي محمول
- وحدة اتصالات 4G مدمجة للتفاعل الكامل للطائرة بدون طيار / معدات التحكم دون قيود في جميع الظروف البيئية
- ) متوافق مع LTE في جميع أنحاء العالم
- مزودًا بنظام إرسال إشارة متعدد الاتجاهات (4 هوائيات اتجاهية مع عاكس (كسب: هوائيات 2.5 ديسيبل / ثانية). تحدد الطائرة بدون طيار أفضل زوج من الهوائيات اعتمادًا على اتجاهها وموضعها بالنسبة إلى موقع تجريبي)
- مزودًا بنظام تصوير فريد متعدد الاتجاهات للعالم المحيط مبني على زوج من الكاميرات المجسمة المركبة على محور متخصص مع نطاق دوران 330 درجة (-120 درجة إلى 210 درجة) ، تعمل في جنبًا إلى جنب مع نظام تحسين ذكي. مسارات الطيران
- مُكيَّفة للطيران الداخلي
- بث فيديو مباشر بدقة 1080 بكسل بزمن انتقال منخفض (300 م / ث) بدون قيود على النطاق في أي مكان في العالم ، مع معدل بت للفيديو 12 ميجابت في الثانية
- القدرة على نقل الملفات إلى التخزين السحابي مباشرة أثناء الرحلة
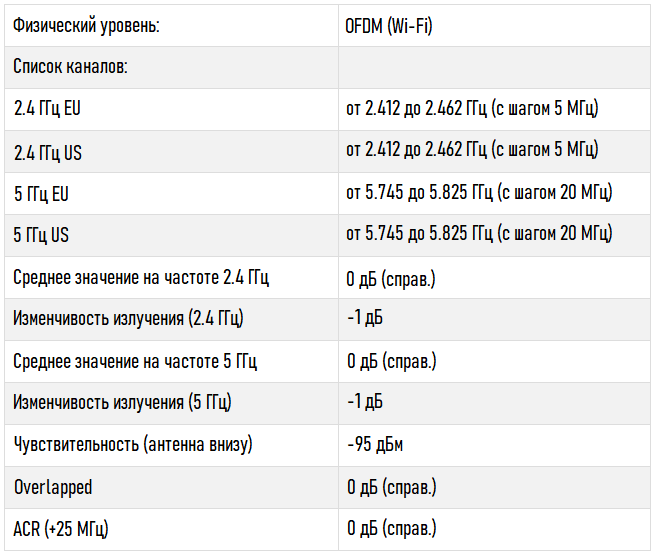
- وحدة اتصال Wi-Fi مدمجة (Wi-Fi 802.11a / b / g / n) للتحكم الكامل في تفاعل الطائرات بدون طيار / المعدات (كبديل خيار الاتصال)
- الرقيق. نطاق تردد Wi-Fi: 2.4 جيجا هرتز / 5.8 جيجا هرتز
- كحد أقصى. مدى طيران FPV عبر شبكة Wi-Fi: 9 كم
- وضع تلقائي فريد لتشغيل وحدات 4G / Wi-Fi ، والذي يسمح ، بناءً على ازدحام الشبكة ، بالانتقال بسلاسة من تقنية اتصال إلى أخرى دون فقدان البيانات
- فئة الحماية بدون طيار IPX3
- كحد أقصى. زمن الرحلة 32 دقيقة
- كحد أقصى. سرعة الطيران الأفقية 61 كم / ساعة
- ماكس. مقاومة الرياح: 13 م / ث
- كحد أقصى.سقف فوق مستوى سطح البحر 5000 م
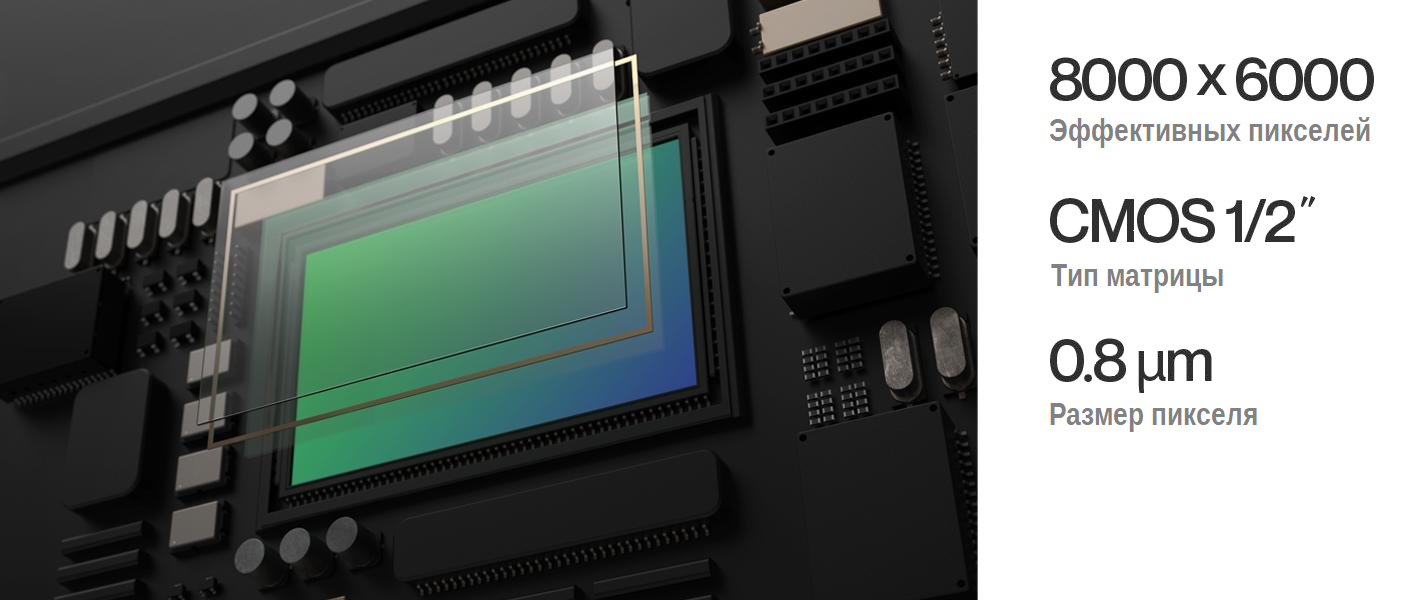
- كاميرا بدقة 48 ميجابكسل بدقة 4K مبنية على مصفوفة CMOS مقاس 1/2 بوصة بحجم بكسل يبلغ 0.8 ميكرون ؛ مع مصفوفة مرشح ألوان Bayer المدمجة
- عدسة LD-ASPH بصرية
- نظام تثبيت الصورة الهجين سداسي المحاور (EIS رقمي ثلاثي المحاور ميكانيكي ثلاثي المحاور)
- يمكن التحكم فيه نطاق التشغيل Gimbal -90 ° إلى 90 °
- 6x تقريب رقمي بدون فقدان (2x 4K / 4x FHD)
- كحد أقصى. معدل بت الفيديو 200 ميجابت في الثانية
- تنسيقات تسجيل الفيديو HDR8 / HDR10
- كحد أقصى. النطاق الديناميكي 14EV
- ملف تعريف ألوان P-log للمعالجة اللاحقة
- 5 × أوضاع طيران وإطلاق تلقائية (القياس التصويري / خطة الرحلة / مصور / Smart RTH / مركبة)
- فتحات مدمجة لبطاقات MicroSD و SIM
- متوافقة مع PIX4D Suite
- أوضاع الطيران التصويري متوفرة في الجوال. تطبيق FreeFlight 7 وبرنامج OpenFlight
- إنشاء خطة طيران بنقرة واحدة
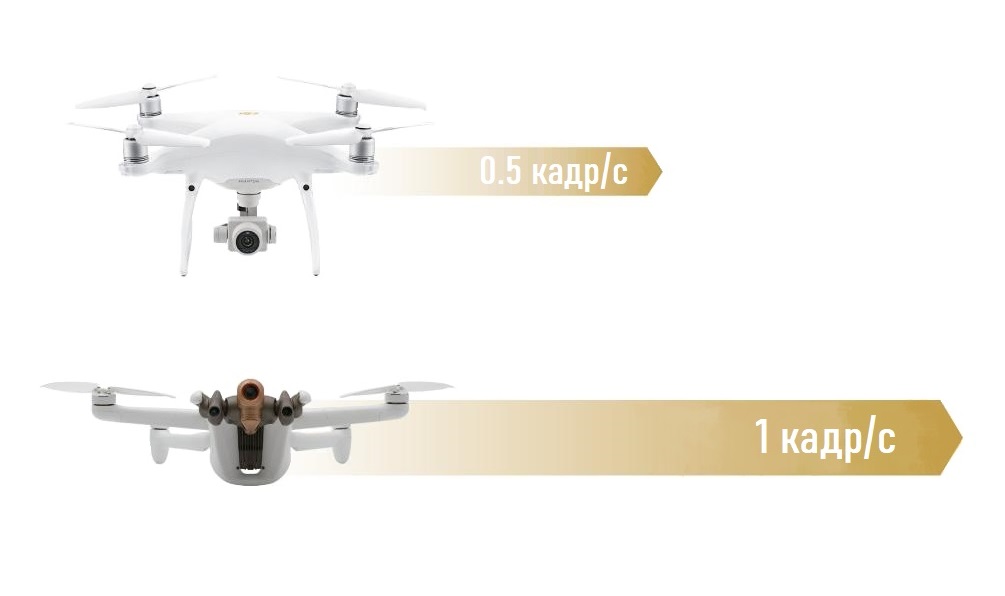
- قياس تصويري 48 ميجابكسل 1 إطارًا في الثانية: ضعف سرعة المنافسين
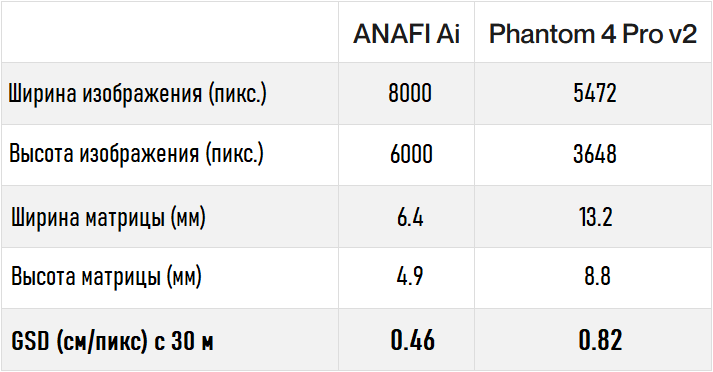
- دقة التصوير: 0.46 سم / بيكسل. GSD at 30m
- دعم Parrot SDK (مع القدرة على تضمين الكود الخاص بك في الطائرة بدون طيار باستخدام Air SDK ، وإنشاء تطبيقات الهاتف المحمول باستخدام Ground SDK ، وتكوين محطة أرضية مفتوحة المصدر باستخدام OpenFlight ، والتفاعل مع Sphinx الحديث أداة محاكاة الطائرات بدون طيار بالإضافة إلى برمجة Python مع Olympe ومعالجة الفيديو والبيانات الوصفية باستخدام PdrAW)
- متوافقة مع برامج الطرف الثالث: PIX4Dscan و PIX4Dinspect و PIX4Dcloud و PIX4Dreact و PIX4Dsurvey
- يتوافق ANAFI Ai مع General لوائح لائحة الاتحاد الأوروبي لحماية البيانات (GDPR)
- خصوصية بيانات فائقة مع NIST مضمّن FIPS140-2 المستوى 3 WISeKey Secure Element مع معايير مشتركة شهادة EAL5
- الفيديو وعناصر التحكم محمية بواسطة SRTP / DTLS وفقًا إلى webRTC
- معدات تحكم محمولة جديدة من Parrot Skyco ntroller 4
- تطبيق جديد للهاتف المحمول Parrot FreeFlight 7

الحزمة
يقدم المطور الطائرة بدون طيار في تكوين واحد ، والذي سيتضمن:
- طائرة بدون طيار ANAFI Ai
- علبة نقل صلبة
- معدات التحكم Parrot Skycontroller 4
- 1 × Smart البطارية
- شاحن USB-PD
- مجموعة المروحة الاحتياطية (2CW / 2CCW)
- الكبل المصاحب (USB-C إلى Lightning)
- 2 × الكابلات المصاحبة (USB -C إلى USB-C)
- مخطط المعايرة

المواصفات
الطائرة

الاتصال
نظام الملاحة
Skycontroller 4

بطارية الطائرة الذكية [372)]
تطبيق

الكاميرا

أوضاع الطيران المستقلة
الأمن السيبراني
Parrot SDK
بعد ذلك ، أنت يمكنك التعرف على المعلومات الأساسية لـ Parrot Anafi Ai ، والتي ستتيح لك معرفة المزيد من التفاصيل حول الإمكانات المعلنة للجهاز ، بالإضافة إلى التحسينات التي تم تنفيذها مقارنة بالإصدار التجاري للطائرة بدون طيار Parrot Anfi Thermal وطائرات بدون طيار أخرى من العلامات التجارية الرائدة.
المظهر





اتصالات
4G
ANAFI Ai يتضمن وحدة راديو 4G (بالإضافة إلى وحدة راديو Wi-Fi) ، والتي تسمح لك ببث دفق فيديو بجودة 1080 بكسل مع أقصى معدل بت 12 ميجابت في الثانية ، مع زمن انتقال منخفض جدًا (300 مللي ثانية) ، دون قيود في النطاق وفي أي مكان في العالم.
التوافق
تدعم وحدة ANAFI Ai 4G أكثر من 28 نطاق تردد ، تغطي أكثر من 98٪ من الترددات المنتشرة في جميع أنحاء العالم.
تبديل الشبكة التلقائي
يتم قياس جودة وعرض النطاق الترددي لشبكات 4G و Wi-Fi كل 100 مللي ثانية لتكييف البث وفقًا لظروف الشبكة. إلى جانب خوارزميات التوجيه ، يتم الحفاظ على الاتصال بين الطائرة بدون طيار ووحدة التحكم الخاصة بها حتى في حالة تعطل Wi-Fi بشدة. وبالتالي ، عندما يكون النطاق الترددي الفعال (النطاق الترددي القابل للاستخدام) لشبكة Wi-Fi أقل من 1.5 ميجابت في الثانية ، سيتحول النظام تلقائيًا إلى 4G.
للحد من استهلاك بيانات الجوال عندما يكون الطيار ضمن نطاق شبكة Wi-Fi للطائرة بدون طيار ، يتم أيضًا الانتقال من 4G إلى Wi-Fi تلقائيًا دون قطع دفق الفيديو.
كحد أقصى. النطاق مع اتصال 4G
يُظهر الفيديو من المطور الحد الأقصى. مدى طيران Anafi Ai مع اتصال 4G في اتجاه واحد بشحن بطارية واحد. كان إجمالي زمن الرحلة 29 دقيقة بمتوسط سرعة طيران أفقية تبلغ 58 كم / ساعة (16 م / ث). خلال هذا الوقت ، تمكنت الطائرة بدون طيار من تغطية 27 كم. يمكنك أيضًا ملاحظة أن الرحلة تمت في ظروف رياح قوية ، والتي تم تحذيرها باستمرار من قبل نظام الطائرات بدون طيار.
خوارزميات تحسين تدفق الفيديو المنفذة
التحكم في الازدحام 4G
تسمح خوارزمية التحكم في الازدحام بما يلي:
- قياس خسارة الحزمة على مدار دورة الشبكة بأكملها.
- قياس التأخير (وقت الذهاب والإياب).
- اضبط النطاق الترددي وفقًا لهاتين المعلمتين.
الهدف النهائي للخوارزمية هو تعظيم عرض النطاق الترددي المتاح مع الحفاظ على أقل زمن انتقال ممكن. يتم تنفيذ هذه الخوارزمية على كل واجهة من الواجهات المتاحة في الطائرة بدون طيار ، ولكل منها معلماتها الخاصة ، والتي تم تحسينها وفقًا للشبكة. استنادًا إلى المعلومات التي توفرها هذه الخوارزمية ، يتخذ مدير الارتباط قرارات التوجيه والواجهة النشطة.
التحكم في الطائرة بدون طيار عبر اتصال 4G
يتصل ANAFI Ai بوحدة التحكم عن بعد عبر 4G في أقل من 30 ثانية إذا كانت الطائرة خارج نطاق شبكة Wi-Fi ، وفي أقل من 15 ثانية إذا كانت الطائرة بدون طيار ضمن نطاق شبكة Wi-Fi. وأيضًا يوفر اتصال 4G:
- كشف وبدء الاتصال على أساس بروتوكول VOIP SIP.
- استخدم خادم ترحيل لإنشاء اتصالات عبر شبكات آمنة.
أداء دفق الفيديو
- الكمون: 300 مللي ثانية.
- الأمان: الفيديو وعناصر التحكم محمية بواسطة SRTP / DTLS وفقًا لـ webRTC.
- الهوائيات: 28 نطاق LTE من 700 ميجاهرتز إلى 2.6 جيجاهرتز.

Wi-Fi
نظام نقل متعدد الاتجاهات
- لدى ANAFI Ai 4 هوائيات عاكسة اتجاهية (بكسب هوائي: 2.5 ديسيبل / ثانية). تحدد الطائرة بدون طيار أفضل زوج هوائي بناءً على اتجاهها وموضعها بالنسبة إلى موضع الطيار.
- مع كسب مُعاد تجميعه 3.5 / - 1.5 ديسيبل في المستوى الأفقي للطائرة بدون طيار ، يكون ANAFI RF مكسبًا موحدًا بدرجة عالية.
- تم تحسين إشعاع هوائي المصب بمقدار 4 ديسيبل فوق ANAFI.
التصميم الخارجي للراديو عالي الطاقة
تعمل مقدمة الراديو على زيادة الطاقة عند قاعدة الهوائي بخطية جيدة جدًا و الحساسية (-94 ديسيبل ميلي واط عند 6.5 ميجا بايت في الثانية) لتحقيق أقصى قدرة تقييدية للجنة الاتصالات الفيدرالية.

موثوقية Wi-Fi
معلمات 802.11
عرض نطاق ترددي منخفض ، زمن انتقال منخفض ، تنوع مستوى الاستقبال بسبب سرعة بدون طيار ، بعيد المدى ، وجود تدخل. تتضمن هذه المعلمات التجميع وإعادة المحاولة وتقنية MiMo (STBC) ومعدل بيانات إطار التحكم وظروف الفصل.
منع التداخل الذكي
ANAFI Ai لديه خوارزمية لحذف القناة (2.4 جيجا هرتز و 5 جيجا هرتز ثنائي النطاق) في حالة التداخل.
التكيف ومراقبة التدفق
تراقب ANAFI Ai باستمرار حالة ارتباطها 4 هرتز ويمكنها اكتشاف التداخل. يسمح لك هذا بتحسين عرض النطاق الترددي وحجم الحزم المرسلة ديناميكيًا. كما أنه ينبه الطيار إذا كان في بيئة تشويش بشكل خاص أو على وشك فقدان الإشارة.
تخفيض عرض النطاق الترددي
في حدود النطاق وإذا سمحت الظروف بذلك ، يمكن لـ ANAFI Ai التبديل إلى عرض نطاق ترددي 10 ميجا هرتز لتحسين حساسيته بمقدار 3 ديسيبل وزيادة النطاق بنسبة 40٪.

مؤشرات الراديو
بث الفيديو
مؤشرات ارتباط الفيديو
تنفيذ خوارزميات تحسين دفق الفيديو
Parrot Gen4 Streaming (الجيل الرابع)
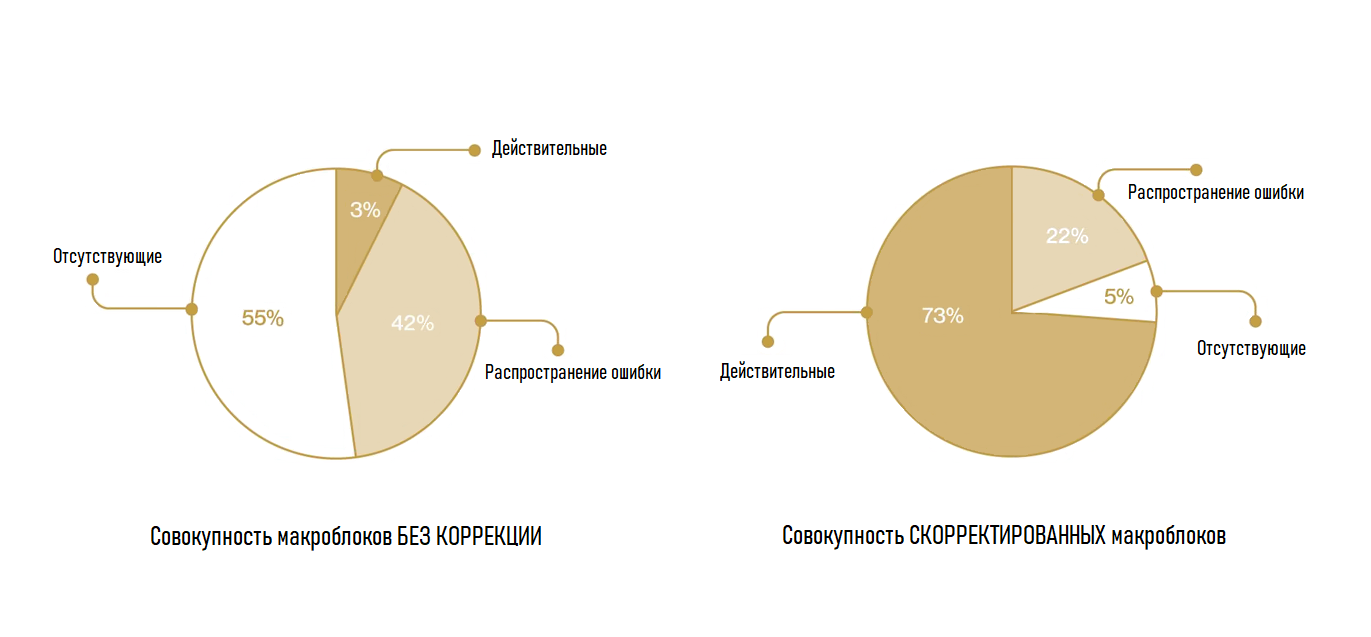
تقلل هذه الخوارزمية من التأثير المرئي لخسائر الشبكة وتوفر إمكانية التشغيل البيني جميع أجهزة فك التشفير ، مع توفير تدفق كامل نحويًا: يتم إعادة بناء الأجزاء المفقودة من الصورة كأجزاء مفقودة ، مماثلة لتلك الموجودة في الصورة المرجعية.
وبالتالي ، فإن الأخطاء موجودة في تلك المناطق المعرضة للضياع ، ولا تنطبق على الصورة بأكملها.
توضح الرسوم البيانية أدناه معدل النجاح لفك تشفير macroblock عند فقدان الشبكة بنسبة 5٪ - مع ميزات التدفق المتقدمة ANAFI Ai وبدونها. تضمن الخوارزمية فك تشفير 75٪ من الكتل الكبيرة بشكل صحيح. إنها تسمح للمستخدم بمواصلة مهمته دون تجميد الشاشة أو فقدان البث.
التحكم في الازدحام
تقوم الخوارزمية أيضًا بتقييم بيئة Wi-Fi والراديو لتوقع وتجنب فقدان الحزمة وازدحام الشبكة ، مما يساعد على تقليل زمن الوصول.تعتمد الخوارزمية على تقدير سعة القناة ، محسوبة على أساس معدل البيانات ومعدل الخطأ في الطبقة المادية ؛ ثم يؤثر على معلمات ترميز الشبكة وتغليفها.
البيانات الوصفية
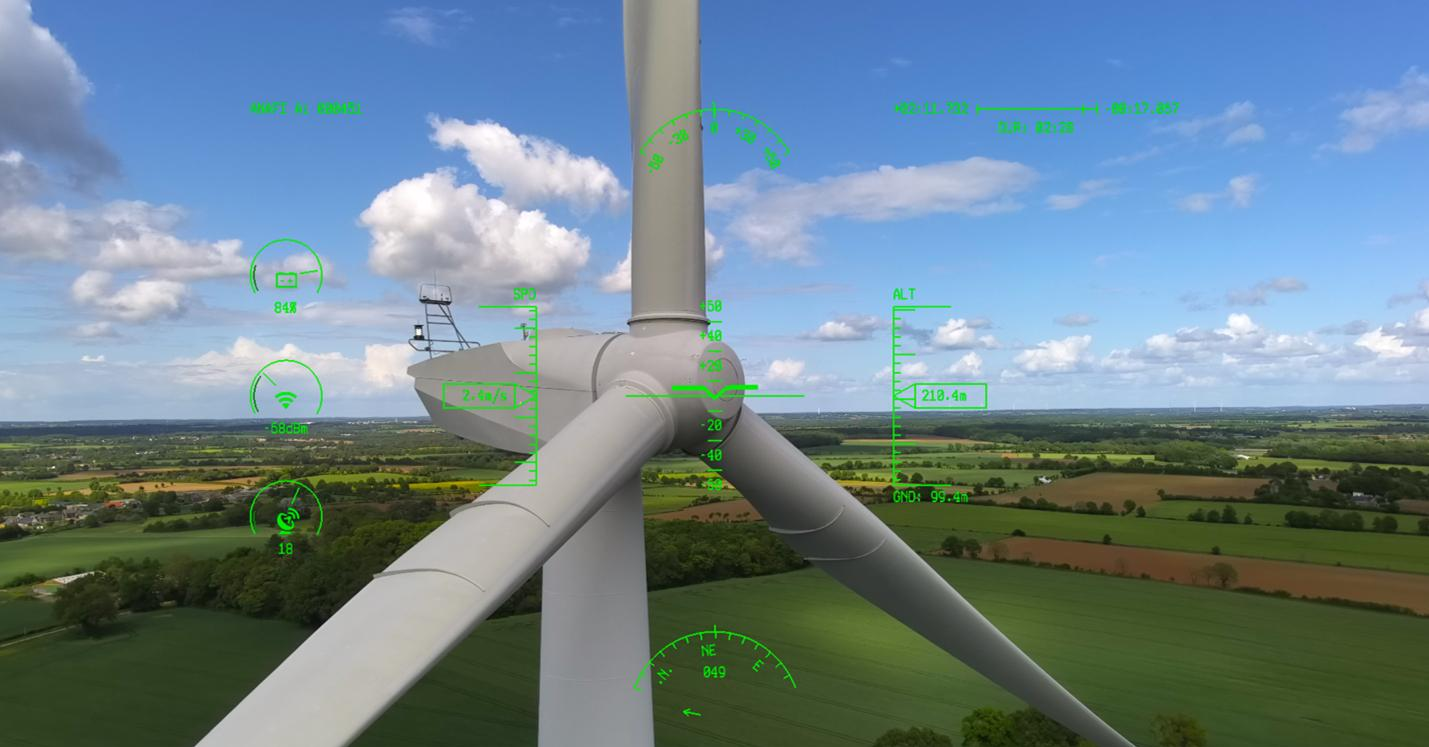
يتم نقل البيانات الوصفية مع دفق الفيديو. على وجه الخصوص ، تحتوي على عناصر القياس عن بعد للطائرات بدون طيار (الموضع ، والارتفاع ، والسرعة ، ومستوى البطارية ، وما إلى ذلك) ومقاييس الفيديو (زاوية الكاميرا ، وقيمة التعرض ، ومجال الرؤية ، وما إلى ذلك).
يؤدي تزامن الصور والبيانات الوصفية المفتوحة وظائف تحديد المواقع بدقة على الخريطة ، أو تتبع أدوات الطيران في HUD ، أو تمكين عناصر الواقع المعزز.
يتم تضمين البيانات الوصفية باستخدام الطرق القياسية (تمديد رأس RTP) ؛ تنسيق البيانات الذي حدده Parrot مفتوح المصدر: وهو متوفر في ANAFI Ai SDK.
الكاميرا

مستشعر 48 ميجابكسل
مصفوفة ANAFI Ai تتضمن عددًا كبيرًا من ميغا بكسل لتصوير جوي مفصل.
تستخدم تقنية مصفوفة مرشح الألوان Quad Bayer ، حيث يكون للمجموعات المكونة من 4 وحدات بكسل متجاورة نفس اللون. وبالتالي ، يمكن الحصول على التقاط HDR في الوقت الحقيقي في كل من أوضاع الصور والفيديو عن طريق إضافة إشارات من أربعة وحدات بكسل متجاورة.
مداها الديناميكي هو 4 مرات من مصفوفات باير القياسية. حتى المشاهد المعقدة يمكن تصويرها بأقل قدر من الإبراز أو فقدان تفاصيل الظل.
عدسة
تم تطوير عدسة ANAFI Ai خصيصًا لببغاء. فهو يجمع بين 6 عناصر شبه كروية وهو مُحسَّن لتقليل التوهج البصري. تعطي هذه العدسة 68 درجة HFoV في وضع الفيديو القياسي و 64.6 درجة HFoV في وضع الصورة القياسي.

أوضاع الفيديو
تلتقط ANAFI Ai فيديو سلس بدقة 4K بمعدل 60 إطارًا في الثانية ، بما في ذلك P-Log وأيضًا HDR10 4K فيديو يصل إلى 30 إطارًا في الثانية. يسرد الجدول أدناه جميع أوضاع فيديو ANAFI Ai.

ترميز الفيديو
يمكن للمستخدمين الاختيار بين H.264 (AVC) و H.265 (HEVC).
تستخدم جميع درجات الدقة تنسيقات البكسل التالية:
- YUV420p (مساحة ألوان 8 بت لكل قناة BT.709) للوضع القياسي و HDR8.
- YUVJ420p (8 بت / مكون ، نطاق كامل - مساحة ألوان BT.709) لنمط P-log.
- YUV420p10 (مساحة ألوان 10 بت لكل قناة BT.2020) لتسجيل HDR10 ، H.265 فقط.
HDR
عند تسجيل الفيديو في HDR8 و HDR10 ، يغطي ANAFI Ai نطاق ديناميكي 14EV. يوفر تنسيق HDR10 حدًا أقصى للسطوع يبلغ 1000 شمعة وعمق ألوان يبلغ 10 بت. يوفر نطاقًا لونيًا مليارًا مقابل 16 مليونًا للنطاق الديناميكي القياسي. بالمقارنة مع HDR8 ، ينتج HDR10 صورًا أكثر سطوعًا بمرتين مع زيادة مقابلة في التباين.يمكن عرض HDR8 على أي شاشة قياسية ، بينما HDR10 مخصص لأجهزة التلفزيون وشاشات HDR10.
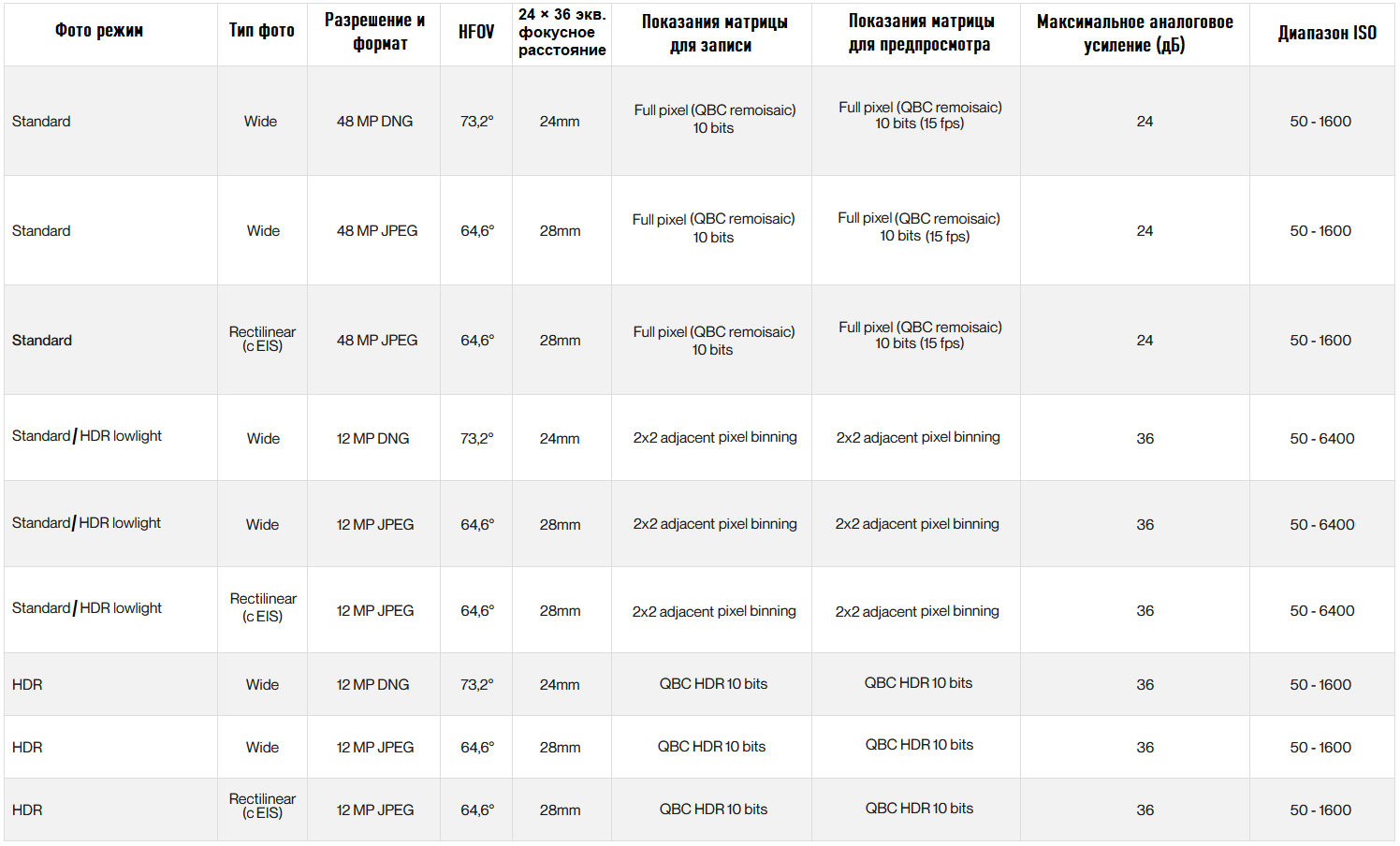
أوضاع الصورة
وصف الأوضاع
يحتوي قسم التحكم في الوضع على الإعدادات التي تؤثر على عدد اللقطات التي يتم التقاطها في كل مرة يتم فيها تحرير الغالق.
وضع الالتقاط الفردي
وضع الالتقاط الفردي القياسي. بعد كل تحرير للغالق ، تتم معالجة الصورة الملتقطة بواسطة النظام على الفور.
وضع الأقواس
يمكن للمستخدمين تصوير سلسلة من 3 أو 5 أو 7 إطارات مع تعريض مختلف لكل إطار. الإعدادات المسبقة التالية متاحة:
- [-1 EV ، 0 ، 1 EV] (الإعدادات الافتراضية)
- [-2 EV ، -1 EV ، 0 ، 1 EV ، 2 قيمة التعريض الضوئي وضع الاندفاع
سيسمح وضع الاندفاع للمستخدم بأخذ 10 إطارات في ثانية واحدة.
وضع بانوراما
يتضمن وضع بانوراما أربع لقطات بانورامية مختلفة:
- كروي (360 درجة) هو وضع بانورامي يتضمن ثلاثة خيارات لـ تصوير بانوراما كروية: Sphere / Little Planet / Tunnel.
- أفقي (180 درجة)
- عمودي (109 درجة)
- على نطاق واسع - سوبر جديد وضع خياطة 9 صور عريض (HFOV 110 ° ، بانوراما مستقيمة)
للحصول على تفاصيل حول مواصفات وضع البانوراما ، انظر الجدول أدناه:

وضع الفاصل الزمني
يسمح لك هذا الوضع بالتقاط الصور في الفترات الزمنية الثابتة التالية:
- 48 ميجابكسل: 1 ، 2 ، 4 ، 10 ، 30 أو 60 ثانية.
- 12 ميجابكسل: 0.5 ، 1 ، 2 ، 4 ، 10 ، 30 أو 60 ثانية.
وضع GPS Lapse
تم تطوير وضع الصورة هذا للفحص والمسح التصويري. يسمح لك بالتقاط الصور على فترات المسافة الثابتة التالية: 5 ، 10 ، 20 ، 50 ، 100 أو 200 متر.
يوضح الجدول أدناه أوضاع ودقة التقاط الصور الثابتة ، بما في ذلك وضع قراءة المستشعر:
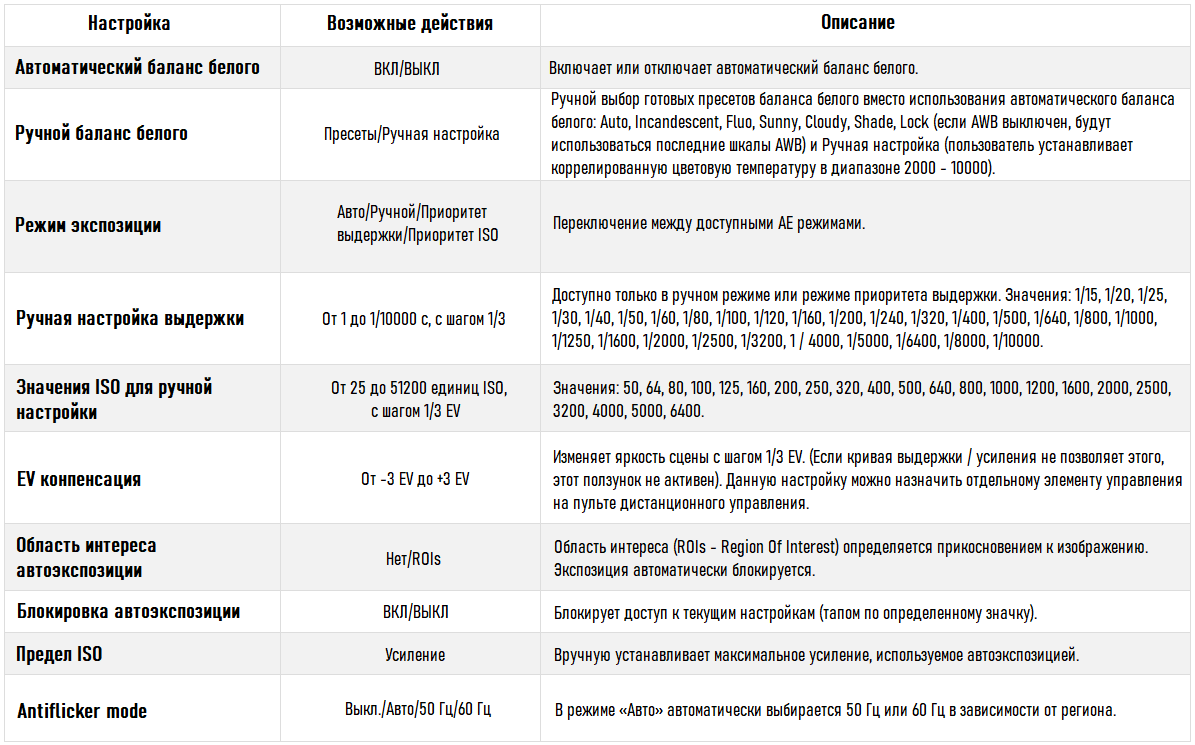
الإعدادات
في التالي يسرد الجدول الإعدادات المتاحة لكل وضع.
تكبير 6x
يتوفر التكبير في جميع أوضاع الصور والفيديو. إلى جانب مستشعر 48 ميجابكسل ، تنتج خوارزميات الشحذ الدقيقة صورًا عالية الدقة حتى عند استخدام تقريب رقمي 6x. يمكن لمستخدمي ANAFI Ai الآن رؤية تفاصيل 1 سم من مسافة 75 مترًا.كما يسمح عدد البكسل العالي أيضًا بقص فيديو 4K إلى 1080 بكسل دون فقدان الجودة.

التثبيت الهجين
تتمتع ANAFI Ai بأدق استقرار في سوق الطائرات بدون طيار الصغيرة.
يجمع بين التثبيت المشترك:
- 3 محاور ميكانيكية (3 محاور ميكانيكية. Gimbal)
- 3 محاور إلكترونية (EIS)
يعمل التثبيت الميكانيكي على تثبيت محور توجيه الكاميرا بغض النظر عن موضع طيران الطائرة بدون طيار. يعمل تثبيت الصورة الإلكتروني على تصحيح تأثيرات الاهتزازات الدقيقة للترددات التي تزيد عن 100 هرتز ، والتي لا يستطيع المحرك الميكانيكي التعامل معها.
انحراف الكاميرا الرئيسية
يتيح لك التثبيت الميكانيكي تثبيت وتوجيه المحور الأفقي لعرض الكاميرا في جميع المحاور الثلاثة.
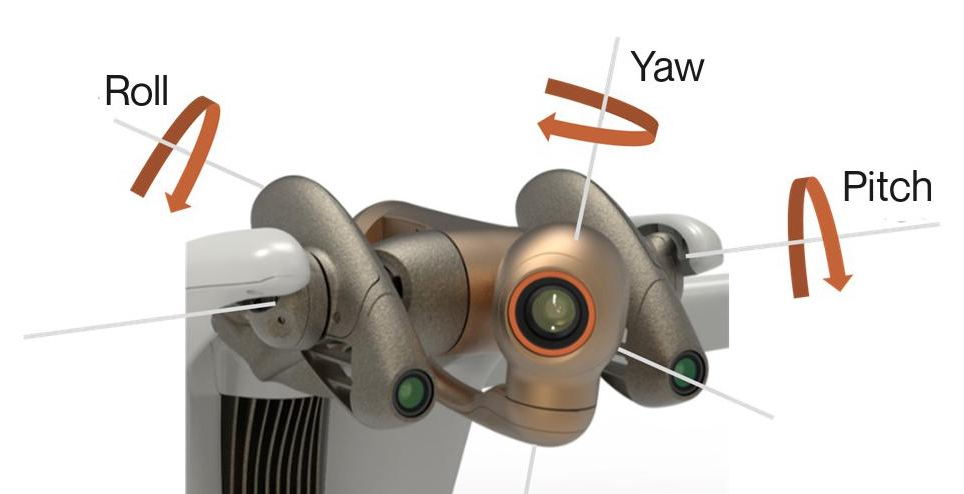 3 محاور دوران ميكانيكي. تعليق الكاميرا الرئيسية ANAFI Ai.
3 محاور دوران ميكانيكي. تعليق الكاميرا الرئيسية ANAFI Ai. الميزات الرئيسية
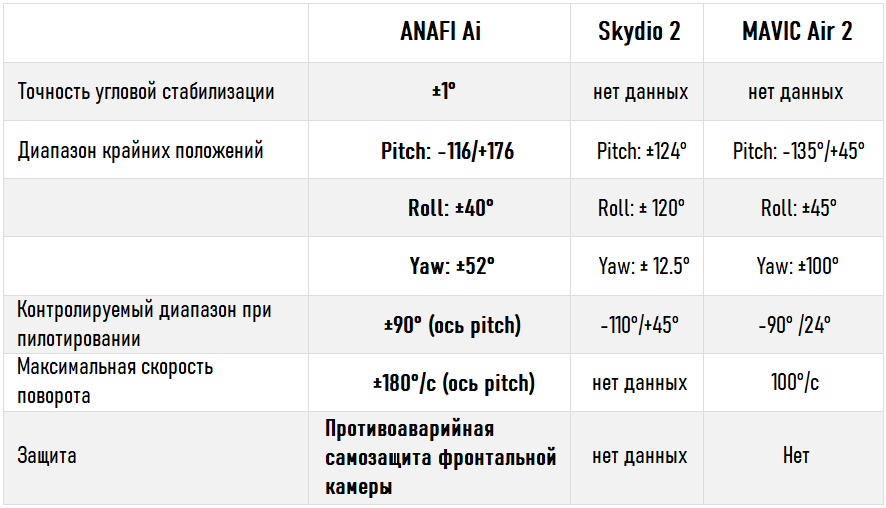
- 3 محاور ميكانيكية للكاميرا الرئيسية
- إزاحة رأسية 292 درجة ، مجال الرؤية من -116 درجة إلى 176 درجة
أداء Gimbal
- تصحح خوارزمية EIS تأثيرات التذبذب والتشوه للعدسة ذات الزاوية العريضة ، كما تؤدي أيضًا رقمية ثلاثية المحاور ثبات الصورة (الالتفاف ، والانحراف ، والانحراف).
- تتمثل الطريقة في تطبيق تحويل هندسي للصورة. يرتبط التحويل الهندسي بالطابع الزمني والموضع الدقيق بفضل وحدة IMU.
- يتم تطبيق التحويل الهندسي على كل صورة وفقًا للتشوه البصري والاهتزازات وحركات وحدة الكاميرا المقاسة.
المدى المحوري 292 درجة
تحتوي الكاميرا على نطاق محوري أفقي يبلغ -116 درجة / 176 درجة حول محور الملعب ، وبالتالي توفر المراقبة أعلى وأسفل الطائرة بدون طيار ، وهي فرصة فريدة في السوق الصغيرة بدون طيار.

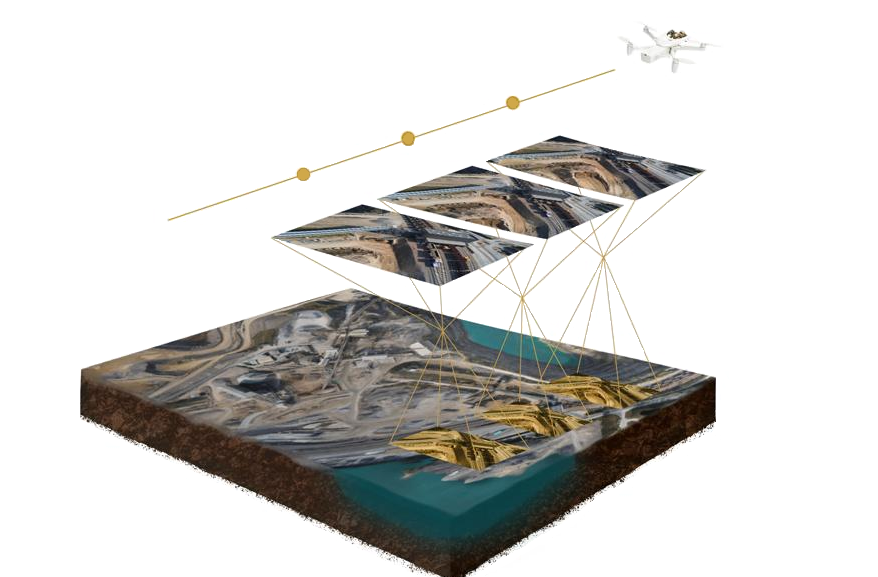
المسح التصويري
يغير التصوير الجوي باستخدام المركبات الجوية غير المأهولة الطريقة التي يجري بها المتخصصون عمليات التفتيش والمسح. تُستخدم طرق القياس التصويري لمعالجة الصور التي تم جمعها بواسطة الطائرات بدون طيار لإنشاء نماذج ثنائية وثلاثية الأبعاد ، والتي تسمح لاحقًا للعملاء بجدولة صيانة الكائنات التي تم مسحها في الوقت المناسب.
يوفر الجيل الرابع موثوقية غير مسبوقة لرابط بيانات الطائرة بدون طيار. يمكن للمستخدمين تشغيل الطائرات بدون طيار فوق مساحات كبيرة ، بالقرب من الهياكل المعدنية والمباني ، دون خوف من فقدان الاتصال.
التفتيش ورسم الخرائط
من خلال الجمع بين الذكاء الاصطناعي للطائرة بدون طيار ANAFI Ai مع منصة PIX4Dinspect عبر الإنترنت ، سيتمكن المستخدمون من إجراء عمليات التفتيش بشكل أسرع وأكثر كفاءة من أي وقت مضى. أو. تتعرف خوارزميات التعلم الآلي على الهوائيات على الأبراج الخلوية ، وتحدد حجمها ، وارتفاعها ، وميلها ، وسمتها ، وعموديتها.
انقر على الصور أدناه لعرض نماذج ثلاثية الأبعاد تم إنشاؤها بواسطة ANAFI Ai.
المثال رقم 1

المثال رقم 2
مصفوفة الأفضل في فئتها [793)]
تم تجهيز كاميرا ANAFI Ai بمستشعر CMOS بدقة 48 ميجابكسل 1/2 بوصة تم تصميمه باستخدام تقنية مرشح الألوان Quad Bayer ، وهو أكثر ملاءمة من أي وقت مضى للفحص والمسح التصويري.تسمح لك المصفوفة المستخدمة بالحصول على صور مفصلة بنطاق ديناميكي واسع.
صور عالية الدقة
ANAFI Ai قادر على توليد صور ثابتة بدقة 48 ميجا بكسل ، وبالتالي التقاط جميع التفاصيل بدقة عالية وإنشاء نقطة سحابة عالية الكثافة.
حدة كبيرة
تتطلب مهام التفتيش القدرة على تحديد التفاصيل الدقيقة مثل الأرقام التسلسلية والموصلات وبقع الصدأ والشقوق الأولية.
نطاق ديناميكي عريض
10 توقفات من النطاق الديناميكي في الوضع القياسي ، 14 توقفًا في وضع HDR. يعد التدرج الأمثل للصورة ضروريًا لإنشاء نقاط سحابية متسقة وعمليات إعادة بناء ثنائية أو ثلاثية الأبعاد عالية الجودة.
55٪ تفاصيل أكثر من المستشعرات 1 بوصة
يعتبر مستشعر رباعي 48 ميجابكسل 1/2 بوصة للطائرة بدون طيار ANAFI أكثر وضوحًا من المستشعرات 20 ميجابكسل 1 بوصة المستخدمة في عدد من الطائرات بدون طيار المهنية الحديثة. توضح الصور التالية من فحص السقف ANAFI Ai و DJI Phantom 4 Pro V2.0 عند نفس الارتفاع هذه الحقيقة بوضوح.

مثالي لعمليات التفتيش
يشتمل ANAFI Ai gimbal على نظام تثبيت هجين مكون من 6 محاور (إلكتروني ميكانيكي) يعوض تقلبات الطيران ويضمن حدة الصورة. تتميز كاميرا ANAFI Ai بمدى قابل للتعديل من -90 درجة إلى 90 درجة ، مما يجعلها أداة مثالية محمولة جواً لعرض الجانب السفلي من قاعدة الجسر.
إمالة قابلة للتحكم ± 90 درجة
دقة
يسمح ANAFI Ai للمستخدمين بتحقيق GSD يبلغ 0.46 سم / بكسل من ارتفاع 30 مترًا ، وهو ما يعني الدقة النسبية للقياس حتى 0.92 سم. بمعنى آخر ، يمكن لـ ANAFI Ai رسم خريطة لنفس الهدف ، حيث تطير أكثر من 1.5 مرة أعلى من Phantom ، بمستوى مماثل من التفاصيل.
قدرات الذكاء الاصطناعي والجيل الرابع
تطبيق واحد. Any Flight Plan
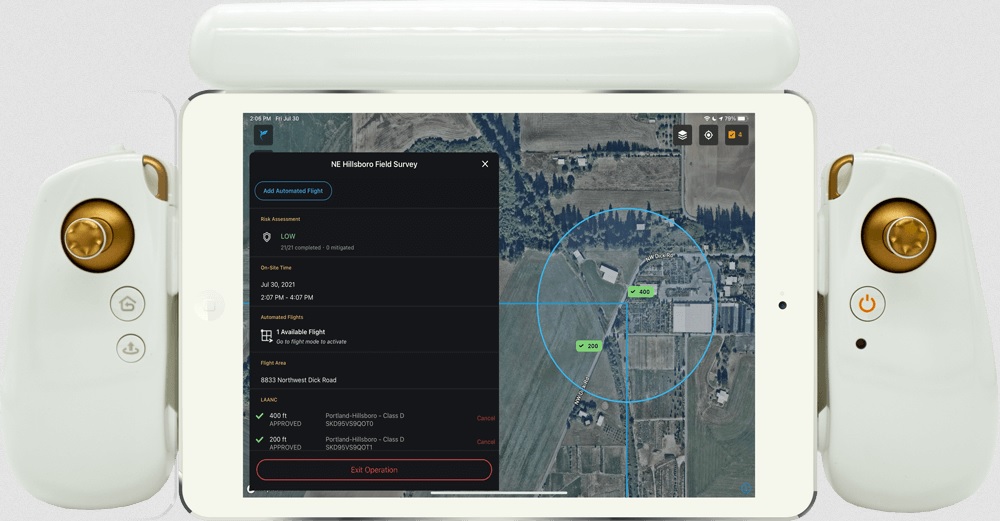
تتيح إمكانات تطبيق FreeFlight 7 المحمول للمستخدم بدء جميع مهام المسح والتفتيش والمسح التصويري.

أوضاع الطيران التصويرية المتاحة
أوضاع الطيران التصويري التالية متاحة الآن في تطبيق FreeFlight 7 المحمول:
- الشبكة
- شبكة مزدوجة
- دائرية
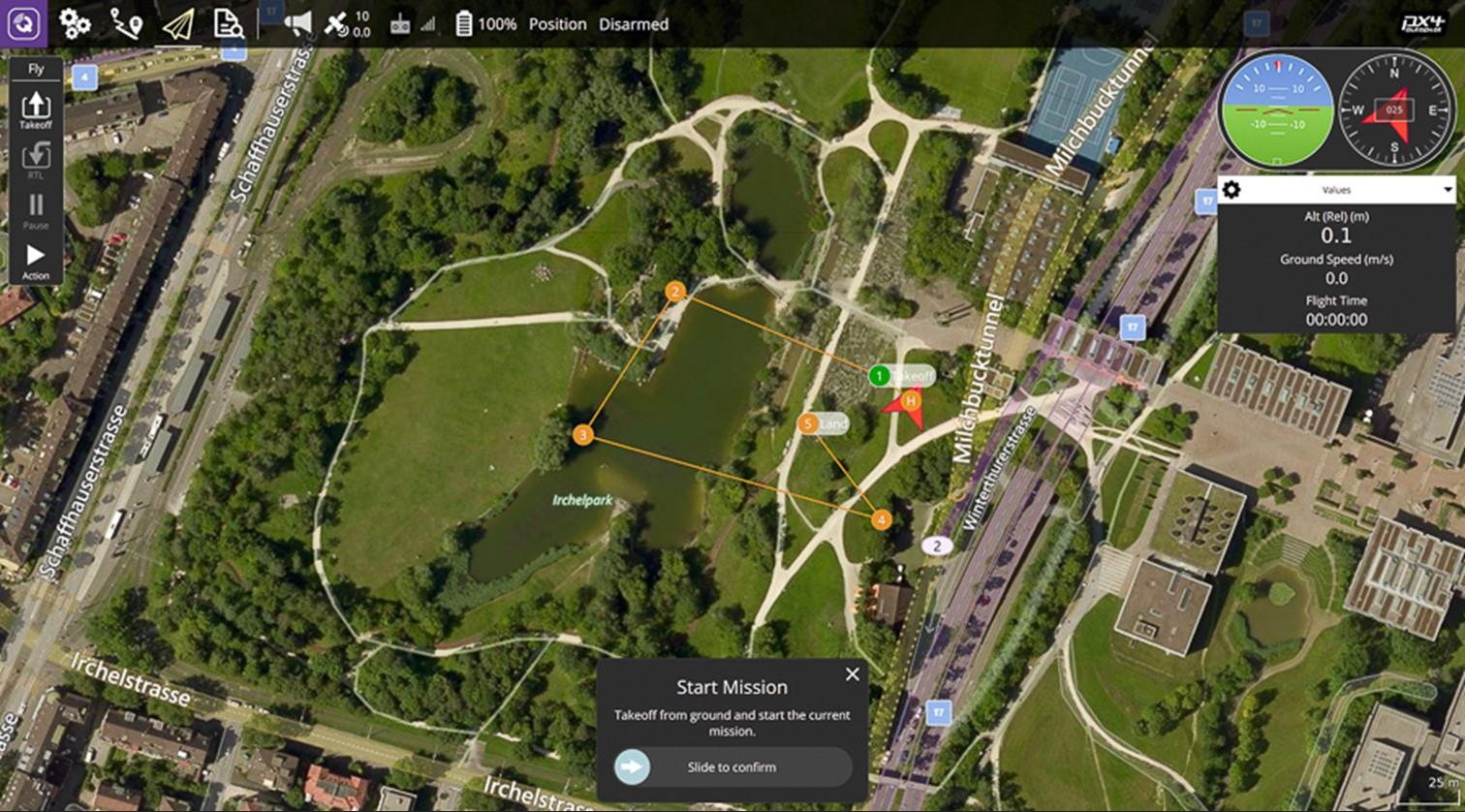
قم بإنشاء خطة طيران بنقرة واحدة
كل ما تحتاج إليه بنقرة واحدة على الخريطة التفاعلية FreeFlight 3D لإجراء مسح سريع للمبنى. يحدد الذكاء الاصطناعي تلقائيًا معلمات الرحلة والمسار الأمثل. تسمح الصور بدقة 48 ميجابكسل مع الإحالة الجغرافية الدقيقة لمستشعرات ANAFI Ai (IMU و GNSS و Flight Time) بإعادة بناء ثلاثية الأبعاد دقيقة.
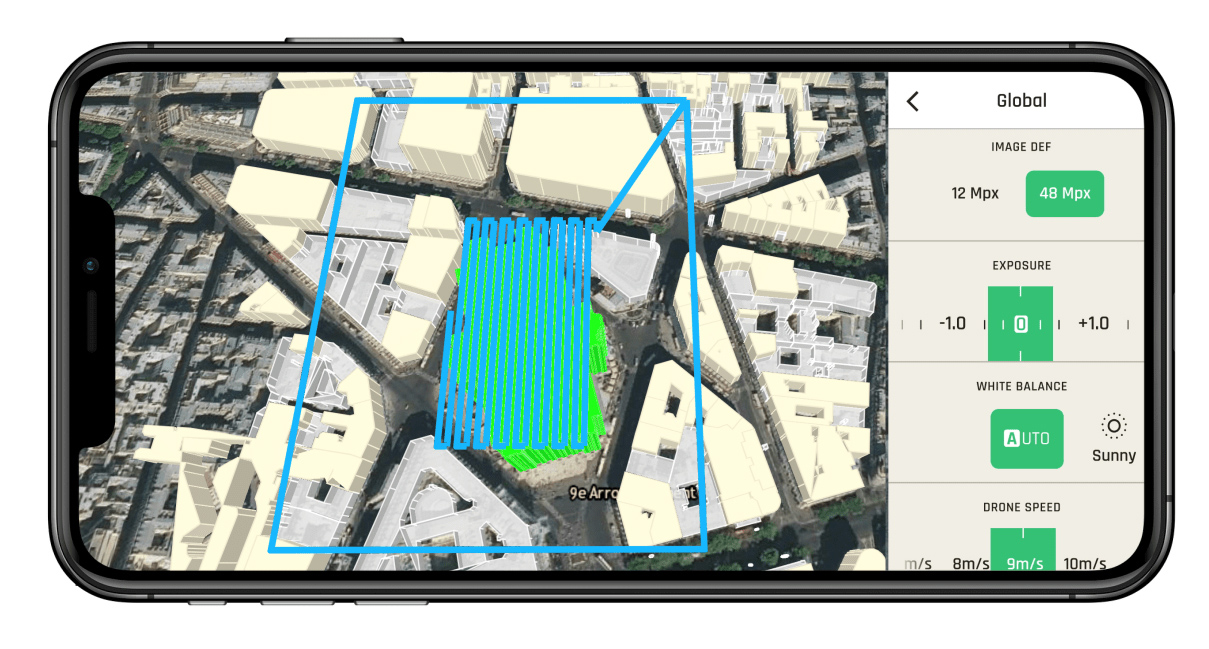 تم إنشاء خطة طيران تلقائية بنقرة واحدة في سجل الأراضي ثلاثي الأبعاد.
تم إنشاء خطة طيران تلقائية بنقرة واحدة في سجل الأراضي ثلاثي الأبعاد. - خلفية رسم الخرائط لـ FreeFlight 7 مأخوذة من برنامج ArcGIS. يعتمد تمثيل المباني ثلاثية الأبعاد على بيانات OpenStreetMap التي تغطي المدن في جميع أنحاء العالم.
- تضمن أنظمة التصور سلامة خطة طيران معينة: لا يحتاج المستخدمون إلى القلق بشأن العقبات. ANAFI Ai يتجنبهم بشكل مستقل.
رحلة مستقلة
نظام استشعار ANAFI Ai متعدد الاتجاهات ، القائم على الرؤية المجسمة ، يوجه نفسه تلقائيًا في اتجاه السفر.

تكتشف الطائرة بدون طيار العوائق التي تبعد 30 مترًا.تقوم تقنية الذكاء الاصطناعي باستمرار ببناء وتحديث شبكة الملء أثناء تنفيذ خطة طيران معينة. إنها تمثل بيئة الطائرات بدون طيار في فوكسل.
تحدد الخوارزميات أفضل مسار لتجنب الاصطدام بالعقبات ، بينما تظل الطائرة بدون طيار مركزة على هدفها: مهمة الطيران المعينة.

اتصال 4G
ANAFI Ai هو أول ميكرودرون تجاري مزود بوحدة 4G. يغطي أكثر من 98٪ من الترددات المستخدمة في جميع أنحاء العالم.

مسح خطوط الكهرباء ذات الجهد العالي. تم التصوير باستخدام ANAFI Ai ، وتم تحريره باستخدام Pix4Dmatic. حجم المشهد: 4060 × 60 × 70 م عدد الصور: 2172. GSD: 1.3 سم / بيكسل. الارتفاع: 90 م التداخل الأمامي / الجانبي: 90٪ / 65٪.
تستطيع الطائرة بدون طيار التبديل بسلاسة من Wi-Fi إلى 4G والعكس ، وبالتالي توفير الاتصال الأكثر موثوقية ، والذي بدوره يضمن:
- القدرة على تنفيذ رحلات BVLOS
- اتصال ثابت حتى عند الطيران في بيئات بها عوائق ومباني.
- طيران آمن في بيئات عالية الضوضاء.) التحميل المباشر للصور على الخوادم السحابية

تحسين وقت الطيران
وفقًا للمطور ، تم تحقيق توفير كبير في الوقت بسبب ارتفاع أداء صورة ANAFI Ai:
- 48 ميجابكسل تسمح للطائرة بدون طيار بالتحليق أكثر من 1.5 مرة أعلى من الطائرات بدون طيار مع مستشعرات 20 ميجابكسل 1 بوصة ، مع تحقيق نفس GSD. وبعبارة أخرى ، فإن الارتفاع العالي والمهمة الأسرع يسيران جنبًا إلى جنب.
- تصوير 1 إطارًا في الثانية: تلتقط ANAFI Ai أسرع مرتين من Autel EVO 2 و DJI Phantom 4 Pro V2.0.
نقل 4G في الرحلة إلى PIX4Dcloud
في عملية إنشاء نموذج رقمي من الصور الجوية لطائرة بدون طيار ، ونقل الملفات ومعالجتها الصور مهمتان تستغرقان وقتًا طويلاً. تساعد ANAFI Ai المستخدمين على تسريع سير العمل. على وجه الخصوص ، يسمح نظام الطائرات بدون طيار بما يلي:
- نقل الصور إلى خوادم آمنة مباشرة أثناء الطيران باستخدام اتصال 4G للطائرة بدون طيار.
- ابدأ فورًا بحساب الأشياء في نهاية الرحلة: الفسيفساء التقويمية ، والسحابة النقطية ، ونماذج الارتفاع ، والشبكة المنسوجة.
- شارك بسهولة الخرائط ثنائية الأبعاد ونماذج المسح ثلاثية الأبعاد عالية الجودة مع الموظفين والعملاء.

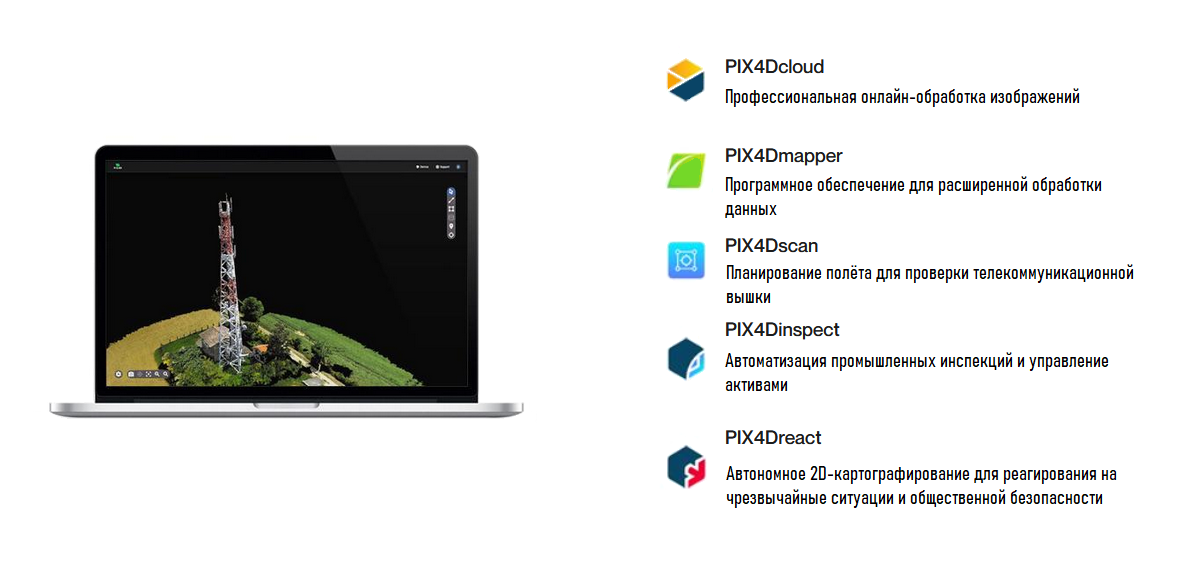
توافق مجموعة PIX4D
ANAFI Ai متوافق تمامًا الآن مع مجموعة فريدة من تطبيقات المسح التصويري للهاتف المحمول وسطح المكتب والسحابة التي تتكون من:
المسح التصويري أو الليدار
لماذا تختار المسح التصويري للمسوحات والتفتيش؟ بالإضافة إلى إمكانية الوصول وسهولة الاستخدام ، يعد القياس التصويري الجوي هو الخيار الأفضل عند الحاجة إلى تفسير مرئي للبيانات.
محترفو المسح التصويري
- يوفر تصورات متعددة: orthomosaic ، سحابة نقطة لون ، شبكة منسوجة.
- ينشئ سحابة من النقاط بكثافة أعلى ، كل منها يحتوي على قدر كبير من المعلومات (الطول ، النسيج ، اللون).
- يتفوق على LIDAR في دقة التصيير الواقعي ثنائي الأبعاد وثلاثي الأبعاد - لا يوفر LIDAR مستوى عالٍ من التفاصيل السياقية.
عيوب LIDAR
- تكلف 100 مرة أكثر من طائرة بدون طيار مع مصفوفة RGB.
- تعقيد معالجة البيانات وأخطاء التفسير المحتملة.
- من الممكن إضافة معلومات اللون ، لكنها تعقد العملية.
- يولد LIDAR سحابة نقطية فقط وهو مخصص لحالات ومواقف محددة.
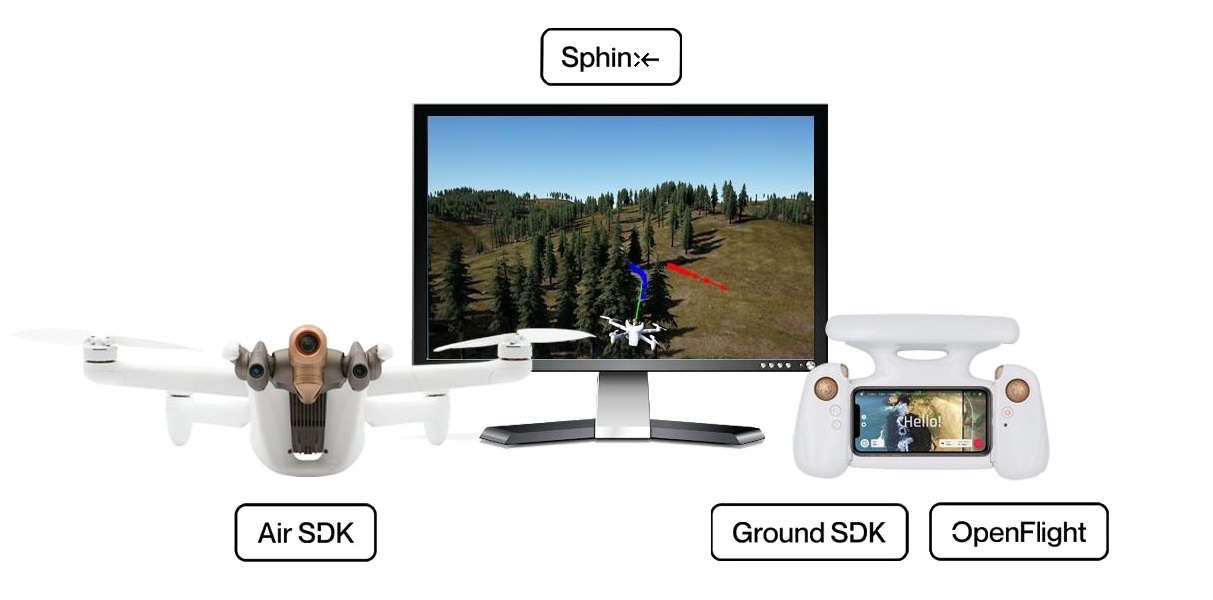
SDK
مجموعة Parrot Software Development Kit هي مجموعة مفتوحة المصدر من الأدوات والبرامج للمطورين. منذ إنشاء أول طائرة بدون طيار A. R. Drone ، برنامج الشركة مفتوح المصدر يدعم منصات وأدوات المطورين ، و Parrot
يوضح المطور أن جميع موارد SDK للشركة متاحة مجانًا ، بدون تسجيل وتتبع ، على البوابة " Parrot بوابة المطور"... يمكنك أيضًا الانضمام إلى آلاف المطورين في Parrot forum حيث يمكنك مناقشة الموضوعات الحالية مباشرةً مع مهندسي الشركة.
Air SDK
قم بتشغيل الكود الخاص بك على ANAFI Ai
توفر Air SDK بنية تقنية ثورية لتنزيل التعليمات البرمجية وتشغيلها مباشرة في ANAFI Ai. يمكن للمطورين برمجة مهام طيران مصممة خصيصًا مع إمكانية الوصول إلى جميع أجهزة استشعار الطائرات بدون طيار وواجهات الاتصال ووظائف الطيار الآلي.
توفر Air SDK وصولاً على متن الطائرة إلى:
- جميع أجهزة الاستشعار (IMU ، GPS ، TOF) وأوضاع الطيران
- دفق الفيديو والبيانات الوصفية مع جميع الكاميرات
- واجهات اتصال Wi-Fi و 4G و USB
- خرائط العمق وشبكات التعبئة
- إنشاء مسار تجنب العوائق
يمكن لأي مطور:
- تغيير حالة الطائرة بدون طيار من خلال إنشاء مهام طيران.
- تغيير وضع التنقل
- إضافة عمليات Linux المضمنة (لـ على سبيل المثال ، نقل البيانات عبر قناة 4G أو استخدام رؤية الكمبيوتر)
تدعم Air SDK لغة البرمجة C أو Python. يأتي Air SDK مع دليل التثبيت المفصل ووثائق API. توضح العديد من أمثلة التطبيقات جميع الاحتمالات التي توفرها هندستها المعمارية الفريدة.
Ground SDK
إنشاء تطبيق محمول قوي
إن Ground SDK عبارة عن منصة برمجيات لمحطة التحكم الأرضية (GCS) للأجهزة المحمولة (يتم دعم كل من iOS و Android). يسمح لأي مطور بإنشاء تطبيق جوال لـ ANAFI Ai للتحكم اللاحق في الطائرة بدون طيار مباشرة من جهاز محمول. جميع وظائف BVS (التحكم ، الفيديو ، الإعدادات) متاحة من خلال واجهة برمجة تطبيقات سهلة الاستخدام وموثقة بالكامل.
OpenFlight
Open Source Ground Control Station
لأول مرة ، يفتح Parrot كود المصدر لتطبيق محطة التحكم الأرضية الخاصة به. OpenFlight هو جوهر تطبيق FreeFlight 7 الشهير مفتوح المصدر. يسمح ذلك للمطور بالتركيز على إضافة وظائفه الخاصة والحصول على الفور على تطبيق ذو مظهر احترافي جاهز للنشر على AppStore.

يحتوي OpenFlight على:
- All UX FreeFlight 7
- جميع إعدادات الواجهة
- رمز التصور ثلاثي الأبعاد للعقبات في الوقت الفعلي
- رمز إدارة اتصالات 4G
- تم نشر OpenFlight بموجب ترخيص BSD-3 مع دليل تثبيت كامل ووثائق شاملة.
أبو الهول
محاكاة واقعية ثلاثية الأبعاد
Parrot Sphinx هي أداة متقدمة لمحاكاة الطائرات بدون طيار. يستخدمه مهندسو Parrot لتطوير واختبار جميع ميزات ANAFI Ai. المفهوم العام هو محاكاة البرامج الثابتة الفعلية للطائرة بدون طيار بجميع مستشعراتها في بيئة واقعية بصريًا وماديًا.

يسمح ببغاء أبو الهول:
- محاكاة جميع الكاميرات وأجهزة الاستشعار
- محاكاة خرائط العمق والتجزئة الصور.
- تصور وتسجيل بيانات الرحلة
- ضبط مستشعرات الطائرات والعناصر المادية المحيطة
- التحكم في عامل الوقت الحقيقي
تم بناء Parrot Sphinx على أساس المعايير المتقدمة المكونات:
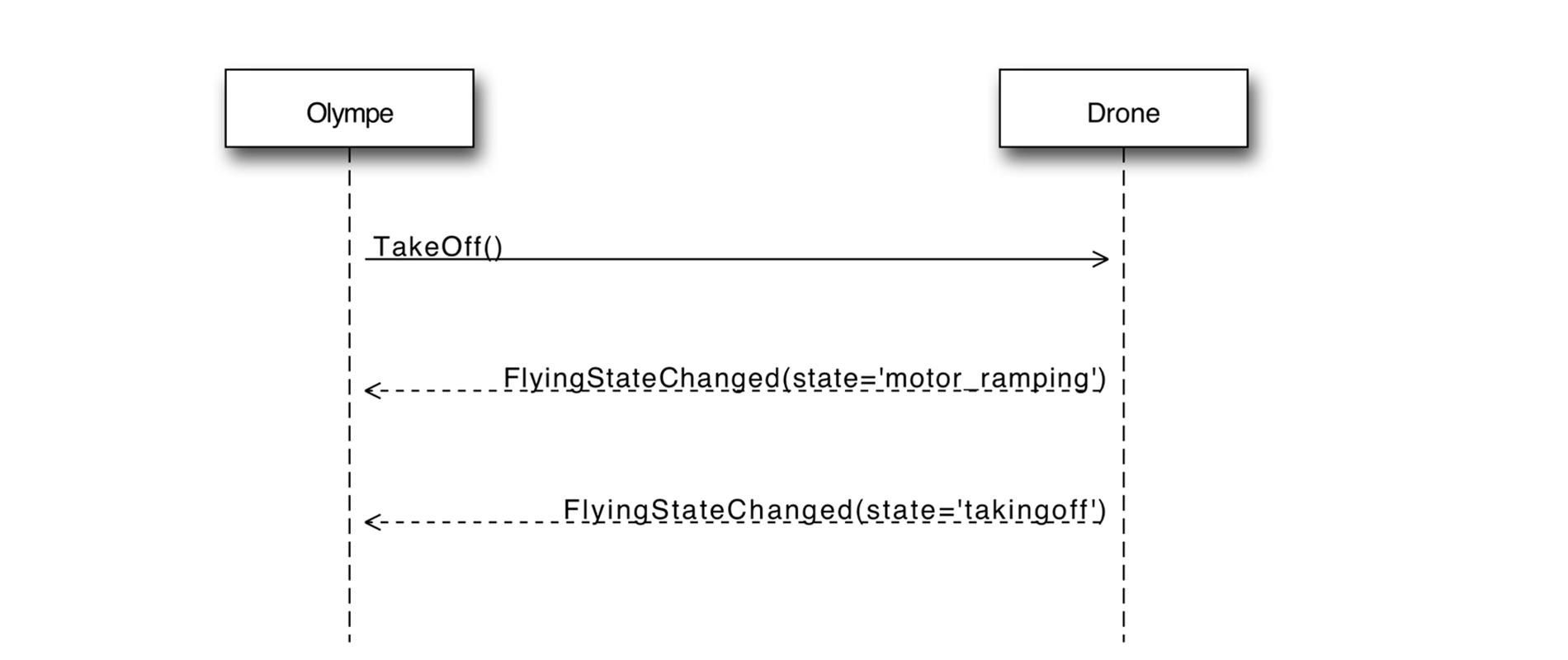
أوليمب
بايثون للتحكم في ANAFI Ai
توفر أوليمب واجهة برمجة تحكم Python لـ ANAFI عاي. كان الغرض الأصلي من أوليمب هو التفاعل مع بيئة نمذجة سفنكس. يمكن لـ Olympe أيضًا التحكم في ANAFI Ai المادي من كمبيوتر بعيد.
يسمح إطار أوليمب بما يلي:
- الاتصال بمحاكاة ANAFI المادية أو المحاكاة
- إرسال رسائل أوامر (تجريبية ، توجيه الكاميرا ، العودة إلى المنزل ، خطة الطيران)
- بدء وإيقاف دفق الفيديو من جميع الكاميرات
- تسجيل دفق الفيديو والبيانات الوصفية المتزامنة
) PdrAW
مشغل وسائط متقدم
PDrAW عارض فيديو متقدم لوسائط ANAFI Ai. يدعم العارض كلاً من البث المباشر (RTP / RTSP) والفيديو المسجل (MP4) على أنظمة Linux و macOS و Android و iOS. يأتي PDrAW كمكتبة (libpdraw) ومكتبة مجمعة (libpdraw-backend) وملف تنفيذي مستقل (pdraw).
يدير PDrAW أيضًا البيانات الوصفية للفيديو. على ANAFI Ai ، يتضمن كل من الفيديو المتدفق والمسجل بيانات وصفية متاحة وموثقة بشكل عام ، مما يسمح بمعالجة الفيديو الجوية المتقدمة.
موديلات C. A. D.
يوفر Parrot نماذج ثلاثية الأبعاد لطائراتهم بدون طيار للاندماج في تصميم CAD الخاص بك للنماذج الأولية السريعة وتكامل الملحقات.
توافق MAVLink و GUTMA
ANAFI Ai متوافق مع بروتوكول MAVLink v1 القياسي مفتوح المصدر ، والذي يسمح بتبادل البيانات في الوقت الحقيقي بين الطائرات بدون طيار ومحطة التحكم. يمكن التحكم في ANAFI Ai يدويًا أو باستخدام تخطيط الطيران التلقائي من محطة أساسية متوافقة مع MAVLink مثل QGroundControl.
* واجهة QGroundControl
ANAFI Ai متوافق مع بروتوكول بيانات الطيران القياسي مفتوح المصدر GUTMA. رابطة UTM العالمية هي اتحاد من اللاعبين الرئيسيين في مجال مراقبة الحركة الجوية.

أكبر نظام بيئي شريك للطائرات بدون طيار Parrot
تواصل Parrot توسيع النظام البيئي العالمي لمقدمي البرامج للطائرات بدون طيار من خلال برنامج SDK الشريك • تقديم حلول متخصصة وفريدة من نوعها لتلبية الاحتياجات المتزايدة والمتطورة للمستخدمين المحترفين.
ببغاء لكل احتياجات العمل
لتحقيق أقصى استفادة من عملية الفحص ، تقدم Parrot لعملائها نظامًا بيئيًا لبرامج الطائرات بدون طيار المتوافقة بدءًا من إدارة الأسطول ورحلة التجميع تخطيط واستيراد سجلات الرحلات قبل التصوير ورسم الخرائط ورصد وتحليل البيانات المستلمة.
PIX4D × Parrot
تطبيقات النمذجة ثنائية الأبعاد / ثلاثية الأبعاد. مجموعة فريدة من تطبيقات المسح التصويري للجوال وسطح المكتب والسحابة.
Verizon x Skyward x Parrot
حل بدون طيار 4G LTE في الولايات المتحدة. أول طائرة بدون طيار آلية ANAFI Ai من نوعها متصلة بشبكة Verizon 4G LTE مع برنامج Skyward المثبت مسبقًا. يفتح الباب لعمليات نقل البيانات في الوقت الفعلي تقريبًا وعمليات النشر عن بُعد والرحلات الجوية خارج خط البصر.

Skyward × Parrot
التكامل والتعلم ضمن قدرة ANAFI. منصة إدارة الطيران بما في ذلك المجال الجوي والوصول إلى LAANC والتدريب والمعدات والاتصال لنشر أسطول الطائرات بدون طيار للمؤسسات.

DroneSense × Parrot
قم ببناء وإدارة وتوسيع نطاق برامج الطائرات بدون طيار الخاصة بك. يمكن لمتخصصي المركبات الجوية بدون طيار في قطاع السلامة العامة استخدام المجموعة الكاملة من إمكانيات DroneSense المصممة خصيصًا لاحتياجات المستجيبين الأوائل.

شركاء Parrot Ecosystem

Parrot Affiliate Program
يقترح المطور توسيع قدرات برنامجه للطائرات بدون طيار من خلال دمج SDK الخاصة بهم.
الأمن السيبراني
سرية البيانات
يلاحظ المطور أنه لا يجمع أي بيانات دون موافقة المستخدمين. يعود قرار نقل البيانات إلى البنية التحتية Parrot أم لا إلى المستخدمين أنفسهم وحدهم. تسمح البيانات المستضافة في Parrot للمستخدم بمزامنة بيانات الرحلة وخطط الطيران بين الأجهزة المختلفة ، بالإضافة إلى تسهيل الدعم وتمكين Parrot من تحسين منتجاتها.
يتوافق ANAFI Ai مع لائحة حماية البيانات العامة للاتحاد الأوروبي (GDPR) ويذهب إلى أبعد من ذلك ، على سبيل المثال ، يسمح لك بحذف جميع البيانات بنقرة واحدة ، مما يوفر للمستخدمين أسهل تحكم.يتم حل هذه المشكلة بنقرة واحدة في تطبيق FreeFlight7 للهاتف المحمول أو في إعدادات الخصوصية لحساب Parrot. Cloud. وبالتالي ، لا يمكن للمستخدمين في أي وقت التوقف عن تبادل البيانات فحسب ، بل يمكنهم أيضًا طلب حذفهم بسهولة.
إذا وافق المستخدم على تبادل البيانات ، فستتم معالجتها بتنسيق شفاف تمامًا ، كما هو موضح بالتفصيل في سياسة خصوصية Parrot.
عند توصيل ANAFI Ai بـ Skycontroller 4 عبر 4G ، يتم استخدام بنية Parrot لإقران الطائرة بدون طيار ووحدة التحكم عن بعد. إذا لم يقم المستخدم بتسجيل الدخول إلى حساب Parrot. Cloud ، فلا يزال بإمكانه استخدام اتصال 4G مع حساب مؤقت فريد. عند استخدام البنية التحتية لـ Parrot لإقران 4G ، يتم تشفير الفيديو باستخدام مفتاح متفق عليه بين الطائرة بدون طيار ووحدة التحكم عن بُعد ، ولا يستطيع Parrot الوصول إلى الفيديو غير المشفر.

متوافق مع FIPS140-2 و CC EAL5 Secure Element
يحتوي ANAFI Ai على عنصر أمان Wisekey مدمج متوافق مع NIST FIPS140-2 المستوى 3 و Common Criteria EAL5 معتمد. تم أيضًا تضمين عنصر أمان مشابه في أجهزة التحكم Skycontroller 4.
وظائف عنصر الأمان:
- يقوم بعمليات تشفير
- يخزن المعلومات السرية ويحميها
يستخدم المفتاح الخاص ECDSA مع معلمات المجال P521 ، فريد لكل طائرة بدون طيار. لا يمكن استخراجه من عنصر الأمان. والشهادة المرتبطة بهذا المفتاح موقعة من قبل مرجع مصدق.
يحمي Wisekey تكامل البرنامج الثابت ، ويوفر تعريفًا فريدًا للطائرة بدون طيار لإقران 4G والمصادقة القوية ، والتوقيع الرقمي الفريد للصور التي التقطتها الطائرة بدون طيار.

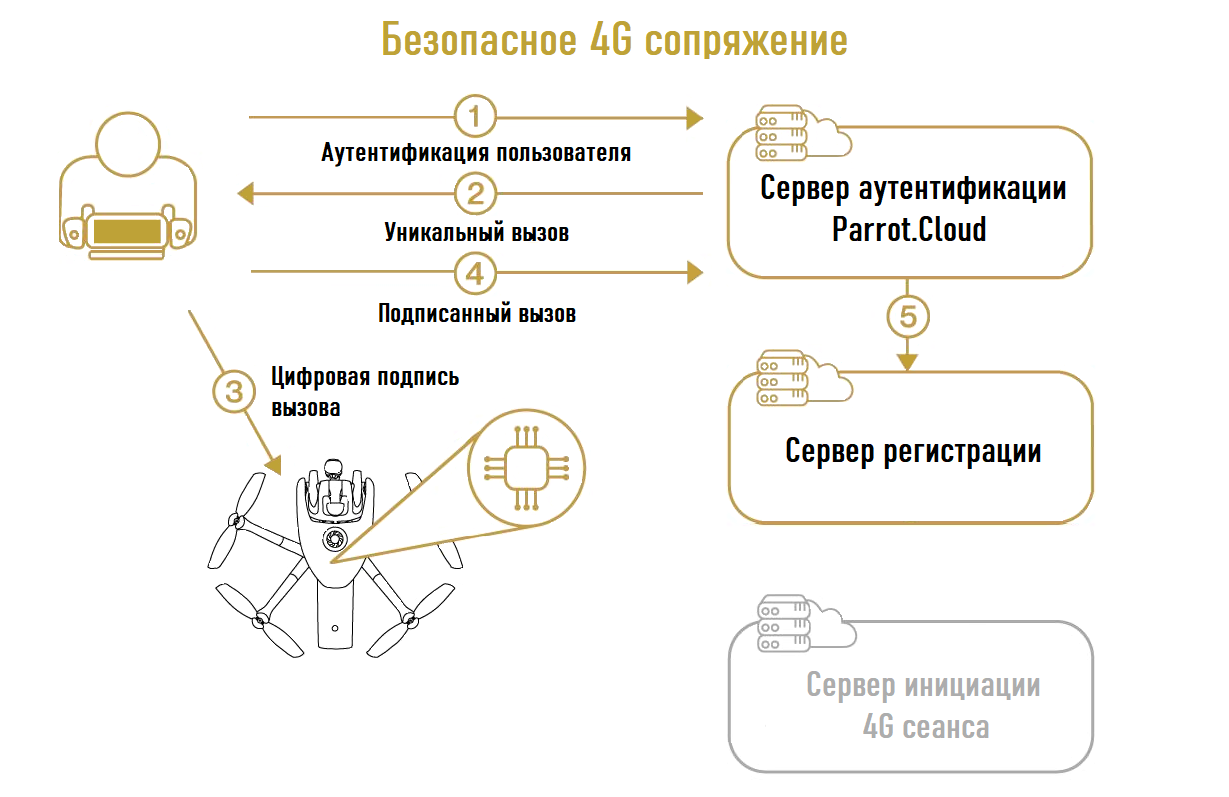
اتصال 4G آمن ومصادقة قوية
عملية إقران الأجهزة بأمان. خلال هذه العملية ، يؤكد المستخدم بشكل موثوق أنه متصل بطائرة بدون طيار معينة. بفضل ANAFI Ai Secure Element ، يمكنه القيام بذلك دون إدخال كلمة مرور داخل الطائرة بدون طيار.
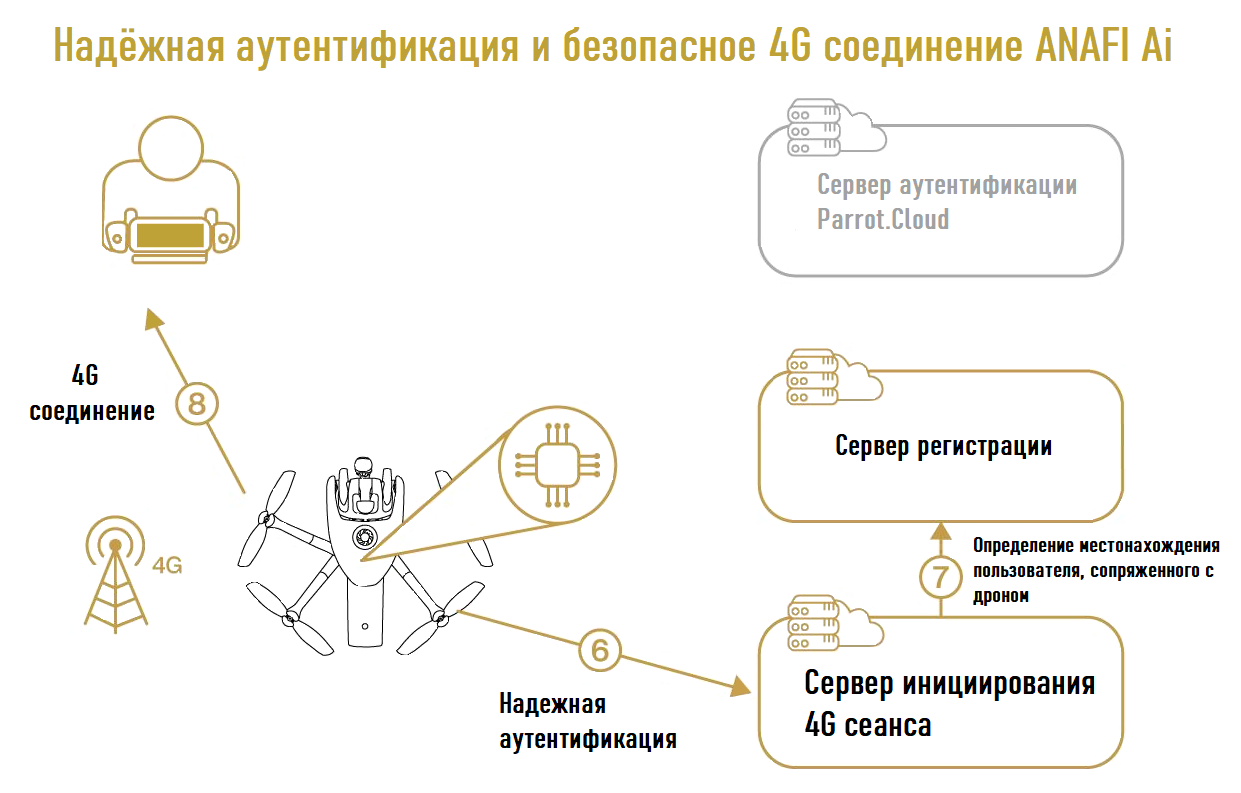
تقوم خوادم Parrot بتسجيل الاتصال بين المستخدم والطائرة بدون طيار. عند فقد اتصال Wi-Fi بين المستخدم والطائرة بدون طيار ، سيتحول ANAFI Ai تلقائيًا إلى اتصال 4G. تقوم ANAFI Ai بإجراء مصادقة قوية على خوادم Parrot باستخدام مفتاحها الخاص المخزن على Secure Element. تبحث خوادم Parrot عن المستخدمين المتصلين وتوفر واجهة بين ANAFI Ai و Skycontroller 4.
لحماية التحكم في الطائرات بدون طيار وتدفقات الفيديو القادمة إلى Skycontroller 4 ، يدعم ANAFI Ai بروتوكولات TLS و DTLS و SRTP.
التهيئة والتحديث الآمن
تسلسل إقلاع الطائرة محمي: يتحقق النظام أنه يستخدم برنامج Parrot وأن هذا البرنامج لم يتم العبث به. يتم إجراء فحص الأمان عند كل تهيئة. تتحكم خدمة التحديث أيضًا في التوقيع الرقمي لتحديثات البرامج.
تكوين مفاتيح المستخدم على Secure Element
يمكن لمستخدمي ANAFI Ai الوصول إلى حساب عامل خاص Secure Element. يستخدم هذا الحساب لإعداد المفاتيح ذات الصلة بهذا المستخدم. يمكن للمستخدمين تكوين Secure Element باستخدام المفاتيح العامة لموفري المهام الذين يثقون بهم. لن يؤدي ANAFI Ai إلا المهام الموقعة بهذه المفاتيح. تمنع هذه العملية المهاجمين من أداء مهام طيران خبيثة على الطائرة بدون طيار.
الصور الموقعة رقميًا
يمكن للعنصر الآمن من ANAFI Ai التوقيع رقميًا على صور الطائرات بدون طيار. هذا التوقيع دليل على أن:
- سعيد التقطت الصورة الموقعة بواسطة المركبة الجوية غير المأهولة المشار إليها.
- لم تتم معالجة الصورة نفسها أو بياناتها الوصفية (طوعًا أو بدونها) - تحتوي البيانات الوصفية ، المعروفة أيضًا باسم EXIF و XMP ، على معلومات حول تاريخ ووقت وموقع الصورة.

بمعنى آخر ، يحمي التوقيع الرقمي جميع البيانات المتعلقة بالصورة ، بما في ذلك المكان والزمان اللذان تم التقاطهما فيه ، وأي منها ANAFI Ai بدون طيار.
يمكن للمستخدمين والشركاء الذين يقدمون حلول برمجية باستخدام التصوير الفوتوغرافي باستخدام الطائرات بدون طيار التحقق من التوقيع الرقمي لصور ANAFI Ai إما بشهادة الطائرة بدون طيار أو من خلال كتالوج المفتاح العام المقدم من Parrot.
الشفافية وفحوصات الأمان المستمرة مع Bug bounty
يستخدم Parrot بروتوكولات قياسية وتنسيقات ملفات كلما أمكن ذلك. لا يوجد رمز غامض أو ميزات مخفية. يتيح ذلك للمستخدم فهم كيفية عمل منتجات Parrot واختبار سلامتها. بالإضافة إلى ذلك ، OpenFlight ، البرنامج المستخدم للتحكم في الطائرة بدون طيار ، مفتوح المصدر ، مما يمنح المستخدمين تحكمًا كاملاً.
في أبريل 2021 ، أطلقت Parrot برنامج Bug Bounty مع YesWeHack ، أول منصة أمان جماعية في أوروبا. من خلال هذه الشراكة ، تستفيد Parrot من مجتمع أبحاث الأمن السيبراني الواسع التابع لـ YesWeHack لتحديد نقاط الضعف المحتملة في طائراتها بدون طيار وتطبيقات الهاتف المحمول وخدمات الويب.
يتكون برنامج Bug Bounty من مرحلتين:
توفر البرامج الخاصة في البداية وصولاً حصريًا إلى باحثين مختارين في مجال الأمن وتتضمن نماذج طائرات بدون طيار في المستقبل.ستؤكد الخبرة والمهارات المتنوعة للباحثين المستوى العالي للأمان للمنتجات قبل طرحها في السوق ، مما سيساعد على تحسين سلامة مستخدمي Parrot وحماية بياناتهم.
بعد هذه الجولة الأولى من برنامج Bug Bounty الخاص وبعد التسويق ، تدخل المنتجات في البرنامج العام. يتم بعد ذلك فحص أمنهم بدقة من قبل مجتمع YesWeHack بأكمله الذي يضم أكثر من 22000 باحث في مجال الأمن السيبراني.

إدارة البيانات
تتيح Parrot Cloud للمستخدمين الذين يختارون مشاركة بياناتهم لإدارة بيانات الرحلة والأسطول ، بالإضافة إلى الوسائط المتعددة البيانات التي تلقتها طائراتهم بدون طيار.
البيانات المجمعة
تجمع Parrot Cloud 4 أنواع من البيانات:
Static (بيانات المنتج):
- الطائرات الرقم التسلسلي
- الرقم التسلسلي للبطارية
- إصدار البرنامج الثابت للطائرة والبطارية
- إصدار جهاز الطائرة والبطارية
- طراز الجهاز
- FreeFlight 7 Release الإصدار
الأحداث
- التنبيهات: البطارية ، الطيار الآلي ، أجهزة الاستشعار
- الاتصال: توصيل / فصل ، بدء التدفق ، تنبيه التداخل ، إشارة ضعيفة تحوم ، وما إلى ذلك) ، وتفعيل مهمة طيران (خطة طيران ، قياس تصويري)
"صور سياقية"
- لقطة زمنية - لقطة و (مرة كل دقيقتين)
- التعلم العميق (رسم خرائط المزيد من الكائنات والمناظر الطبيعية لتحسين استقلالية الطيران والتتبع وتجنب العوائق)
- التصوير المجسم (خريطة العمق)
- تم تشغيل الصور حسب الحدث
- بداية ونهاية عبارات التحليق الدقيقة ، الهبوط الدقيق
- تحطم الطائرة بدون طيار
- يتم تشويش الوجوه تلقائيًا أثناء الإرسال
القياس عن بعد [1126)]
الاستخدام النهائي للبيانات التي تم جمعها
يقوم Parrot فقط بجمع واستخدام البيانات من العملاء الذين وافقوا على مشاركتها من أجل تحسين الجودة من منتجاتها...
إدارة الصيانة
الصيانة الوقائية: تجمع أدواتنا جميع المعلومات المتعلقة بالبعثات (نوع المهمة ، أوقات الإقلاع والهبوط ، عدد المهام ، موقع الطائرة بدون طيار ، سرعة الرحلة ، خطة الرحلة وإعدادات AirSDK). يتيح لك ذلك تلقي معلومات دقيقة حول حالة أسطول طائرات ANAFI Ai بدون طيار (بالإضافة إلى وحدات التحكم والبطاريات الخاصة بهم) في الوقت الفعلي.
الصيانة التصحيحية: المعلومات المجمعة مفيدة في التحديد السريع لحالة طائرة أو بطارية معينة.
تعزيز الذكاء الاصطناعي (AI)
توفر عناصر الذكاء الاصطناعي في ANAFI Ai (PeleeNet ، والشبكات التلافيفية ، وما إلى ذلك) للمستخدمين خدمات وميزات لا مثيل لها: تجنب العقبات تتبع الهدف عدة طرق طيران. تعتمد جودة الذكاء الاصطناعي على كمية ونوعية البيانات المجمعة (الصور ومقاطع الفيديو): تغذي هذه البيانات التعلم الآلي. في هذا الصدد ، جودة البيانات ليست العنصر الوحيد الحاسم: البيانات الوصفية المرتبطة بهذه البيانات أساسية أيضًا. لهذا السبب ، تقوم أداتنا بجمع الصور والبيانات الوصفية بشكل منتظم واعتمادًا على الأحداث ، بإجمالي 30 إلى 50 ميجابايت في الدقيقة.
خصائص الرحلة
الخصائص الديناميكية الهوائية
المحركات والديناميكا الهوائية
 صورة CFD لشفرات المروحة ANAFI Ai
صورة CFD لشفرات المروحة ANAFI Ai شفرات دافعة تقليد حيوي جديدة مع حيتان الحافة الأمامية التي تشبه الحدباء. مكّن هذا النهج من زيادة كفاءة الدفع لمحطة الطاقة ، والتي قدمت عند الإخراج زيادة في الدفع بنفس سرعة الدوران. هذا التأثير يمكن مقارنته بزيادة قطر الدوار.
يتم أيضًا تقليل الضوضاء الصوتية ، وخاصة الضوضاء النغمية المنبعثة من الحافة الأمامية. لذلك ، ANAFI Ai أهدأ [71.5 ديسيبل SPL (A) عند 1 متر] من Skydio 2 [76.4 ديسيبل SPL (A) عند 1 متر].
- زمن الرحلة أكثر من 32 دقيقة
- بفضل الخصائص الديناميكية الهوائية المحسنة لجسم الطائرة ونظام الدفع ANAFI Ai ، تبلغ السرعة القصوى في الرحلة الأمامية 61 كم / ساعة ، مع رحلة جانبية ورحلة للخلف 58 كم / ساعة
- كحد أقصى. مقاومة الرياح 12.7 م / ث.
- بفضل كفاءة عزم الدوران العالية للمحرك / المروحة والاستقلالية العالية للبطارية ، يبلغ المدى 22.5 كم (بسرعة ثابتة تبلغ 50 كم / ساعة في الطقس الهادئ).
 حزم CFD ANAFI Ai
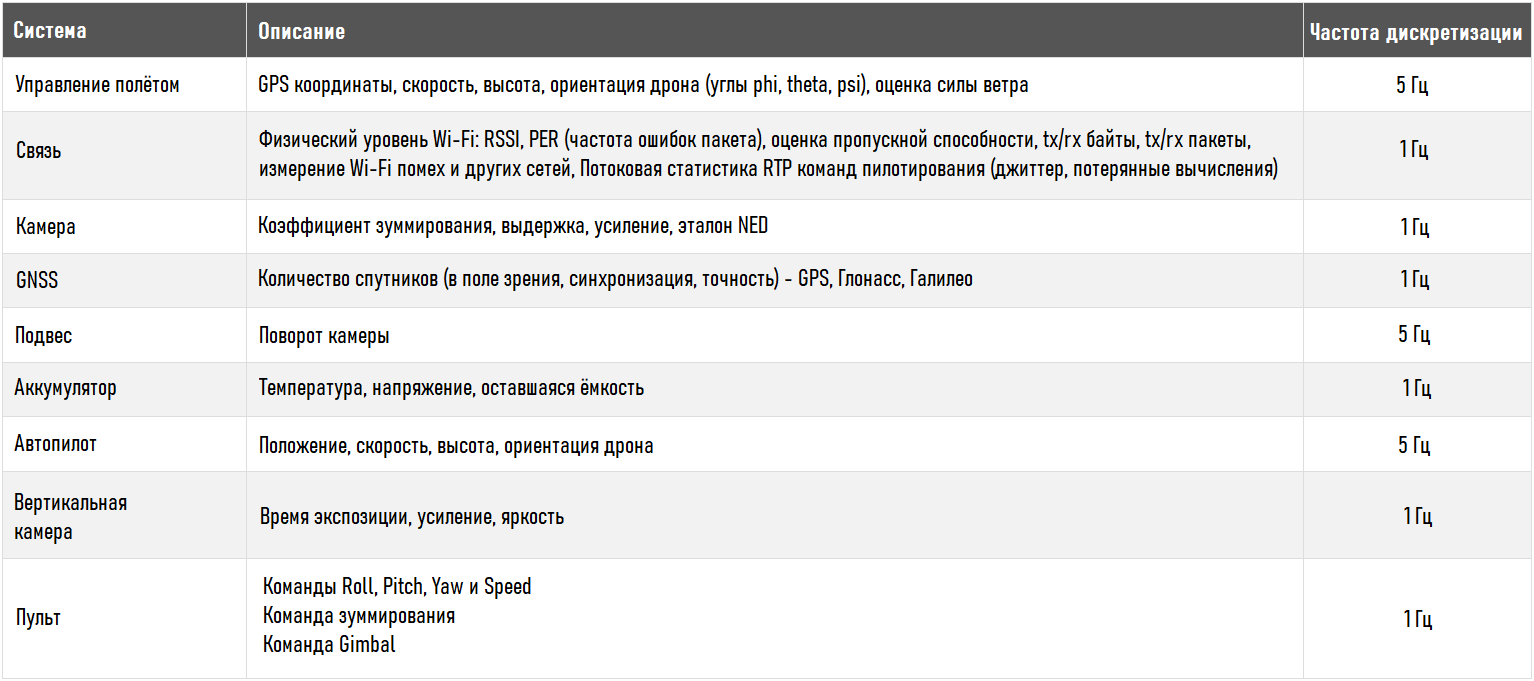
حزم CFD ANAFI Ai مستشعرات
لضمان طيران آمن ANAFI Ai مزود بـ:
- 2 × IMU (ICM-40609-D و ICM42605)
- مقياس المغناطيسية LIS2MDL
- وحدة GPS UBX-M8030
- TI OPT3101 وقت الرحلة (ToF)
- بارومتر LPS22HB
- الكاميرا العمودية
خصائص المستشعر
Flight IMU: ICM-40609-D
- جيروسكوب ثلاثي المحاور
- النطاق: ± 2000 درجة / ثانية
- الدقة: 16.4 LSB / درجة / ثانية
- الإزاحة / الدقة: ± 0.05 درجة / ثانية (بعد المعايرة الحرارية والديناميكية)
- مقياس تسارع ثلاثي المحاور
- النطاق: ± 16 جم
- الدقة: 2.048 LSB / mg
- الإزاحة / الدقة: ± 0.5 مجم (XY) ± 1 مجم (Z) (بعد المعايرة الحرارية والديناميكية)
- التحكم في درجة الحرارة s: نظام تسخين مضبوط بالنسبة لدرجة الحرارة المحيطة ، مستقر في حدود: ± 0.15 درجة مئوية
- تردد القياس: 2 كيلو هرتز
مقياس المغناطيسية: LIS2MDL [1189)]
- النطاق: ± 49.152G
- الدقة: 1.5 مللي جرام
- الإزاحة / الدقة: ± 15 مللي جرام (بعد التعويض ، بأقصى سرعة للمحرك)
- قياس التردد: 100 هرتز
بارومتر: LPS22HB 1
- النطاق: 260 إلى 1260 هكتو باسكال
- الدقة: 0.0002 hPa
- الإزاحة / الدقة: ± 0.1 hPa
- التحكم في درجة الحرارة: نظام التسخين المتحكم فيه فيما يتعلق بدرجة الحرارة المحيطة ، المستقر داخل: ± 0.2 درجة مئوية
- تردد القياس: 75 Hz
- قياس الضوضاء: 20 سم RMS
GNSS: UBX-M8030 1
- هوائي التصحيح الخزفي 25 × 25 × 4 مم ، السماح بتحسين كسب 2 ديسيبل مقارنة بـ ANAFI 1
- الحساسية: البدء البارد -148 ديسيبل / التتبع والتنقل: -167 ديسيبل ميلي
- وقت الإصلاح الأول: 40 ثانية
- الدقة / الدقة: الموضع (الانحراف المعياري 1.4 م) ، السرعة (الانحراف المعياري 0.5 م / ث)
الكاميرا العمودية
- مستشعر الصور التنسيق: 1/6 بوصة
- الدقة: 640 × 480 بكسل
- مستشعر الصورة مع غالق شامل
- أبيض وأسود
- فوف: زاوية الرؤية الأفقية: 53.7 درجة / زاوية الرؤية الرأسية: 41.5 درجة
- الطول البؤري: 2.8 مم
- قياس سرعة التدفق البصري على الأرض عند 60 هرتز
- 15 هرتز والتوافق الدقيق @ 5Hz
ToF: TI OPT3101
- النطاق: 0-15 م
- الدقة: 0.3 مم
- ) صحة ب: ± 2 سم (بعد المعايرة)
- تردد القياس: 64 هرتز
الكاميرا العمودية IMU: ICM-42605
- جيروسكوب ثلاثي المحاور
- النطاق: ± 2000 درجة / ثانية
- الدقة: 16.4 LSB / درجة / ثانية
- الإزاحة / الدقة: ± 0.1 درجة / ثانية (بعد الديناميكي) معايرة)
- مقياس تسارع ثلاثي المحاور
- النطاق: ± 16 جم
- الدقة: 2.048 LSB / mg
- الإزاحة / الدقة: ± 2.0 مجم (XY) ± 5.0 مجم (Z) - بعد المعايرة الديناميكية
- تردد القياس: 1 كيلو هرتز
- مزامنة الأجهزة مع الكاميرا العمودية ، الدقة: 1 ميكرو ثانية
الطيار الآلي
توفر وحدة التحكم في الطيران ANAFI Ai تجربة تجريبية بسيطة وبديهية: لا يلزم تدريب لتشغيلها.يسمح لك بأتمتة العديد من أوضاع الطيران (Flight Plan ، Cameraman ، Hand-off ، Smart RTH). تجمع خوارزميات اندماج المستشعر البيانات من جميع أجهزة الاستشعار لتقدير نسبة ANAFI Ai والارتفاع والموضع والسرعة.
تقييم الحالة ضروري للتشغيل السليم للطائرات بدون طيار. تكون المروحيات الرباعية بطبيعتها غير مستقرة عند استخدام جهاز التحكم في الطيران بحلقة مفتوحة ؛ للتحكم فيها بسهولة ، ناهيك عن التحكم المستقل ، من الضروري تثبيتها باستخدام خوارزميات التحكم في الحلقة المغلقة. تحسب هذه الخوارزميات الأوامر وترسلها إلى المحركات المطلوبة بواسطة ANAFI Ai لتحقيق المسارات المطلوبة.

رحلة داخلية
في غياب إشارة GPS ، يعتمد ANAFI Ai بشكل أساسي على قياسات الكاميرا الرأسية لتقدير السرعة والموقع. يتم تحديد أداء الكاميرا الرأسية بواسطة خوارزميتين رئيسيتين:
- التدفق البصري لتقدير السرعة
- اكتشاف النقاط الرئيسية ومطابقتها لتقدير الموقع
الكاميرا العمودية يمكن أن تعمل الخوارزميات في ظروف الإضاءة المنخفضة بفضل ANAFI Ai المجهز بزوج من مصابيح LED الموجودة بجوار الكاميرا الرأسية. إنها تسمح للطائرة بدون طيار بالبقاء مستقرة ، خاصة عند الطيران في الداخل أو في حالة عدم وجود نظام تحديد المواقع العالمي (GPS) ، على ارتفاع أقل من 5 أمتار فوق سطح الأرض. تتكيف قوة مصابيح LED تلقائيًا ، اعتمادًا على احتياجات الخوارزمية.
رحلة مستقلة
الميزات الرئيسية
- نظام استشعار دوار مع مجال رؤية واسع
- ) استخراج عمق الفضاء المحيط بناءً على محاذاة الصوت المجسم والعمق بالحركة. سرعات تصل إلى 29 كم / ساعة
يوضح هذا الفصل تفاصيل المستشعرات والأجهزة والخوارزميات المستخدمة بواسطة ANAFI Ai لتمكين الطيران المستقل. وهي منظمة على النحو التالي:
- وصف تفصيلي لنظام الإدراك ANAFI Ai
- الخوارزميات الإدراكية المستخدمة لإعادة بناء البيئة ثلاثية الأبعاد المحيطة بالطائرات بدون طيار
- إعادة الجدولة والعقبة التجنب

إستراتيجية نظام الإدراك
إن إدراك البيئة ثلاثية الأبعاد هو قدرة أساسية على تحقيق طيران مستقل خاصة في الأماكن الضيقة. إنه شرط أساسي لضمان الكشف عن العقبات وتجنبها ، مما يقلل العبء على مشغل الطائرة بدون طيار ، ويزيد من نجاح المهمة ويضمن سلامة الطائرة. [١٢٧٢] (١٢٧٣) إطلاق العنان للإمكانات الكاملة للكاميرا الطائرة ، والتي يمكنها التحرك والتدوير بحرية في جميع الاتجاهات دون قيود ، يتطلب حلاً فعالاً للاستشعار.على وجه الخصوص ، يجب أن يكون نظام الاستشعار قادرًا على تلقي معلومات حول البيئة في الاتجاهات التي تتوافق مع الحركة الأمامية أثناء الطيران - بغض النظر عن اتجاه الكاميرا.
تعتمد ANAFI Ai على حل تقني فريد يعتمد على محورين ميكانيكيين لفصل اتجاه الكاميرا الرئيسية ونظام الاستشعار: محور gimbal ، مما يجعله اتجاهًا ثلاثي الأبعاد مستقلاً عن اتجاه الطائرة بدون طيار.
- تم تركيب نظام الاستشعار على محور أحادي المحور - متصل بحركة الانعراج للطائرة بدون طيار ، ويمكن توجيهه في أي اتجاه.
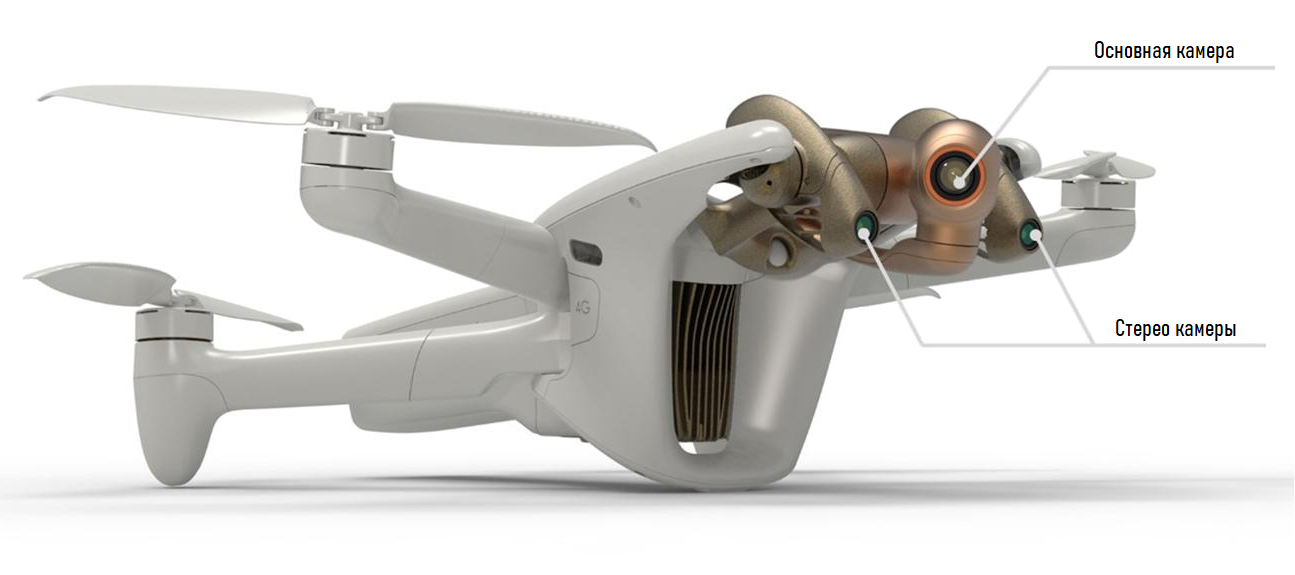 مثبت ANAFI Ai المزدوج للإدراك والتصور.
مثبت ANAFI Ai المزدوج للإدراك والتصور.
محاور الإمالة للعلّاقين متداخلة ومتداخلة لتحقيق تصميم فائق الصغر.
بفضل هذا الحل ، يمكن توجيه الكاميرا الرئيسية ونظام الاستشعار في اتجاهين مختلفين. يتجنب هذا التصميم استخدام الكاميرات باهظة الثمن على الجانبين ، أعلى وأسفل ومؤخرة الطائرة بدون طيار مع توفير مجال رؤية كبير متاح لنظام الاستشعار.
تم تنظيم هذا القسم على النحو التالي:
- تفاصيل المستشعرات المستخدمة لنظام الاستشعار
- مواصفات لكل من الكاميرا الرئيسية ومحور نظام الاستشعار
- استراتيجيات لاستهداف نظام الاستشعار لاستغلال إمكانات هيكل التعليق المزدوج
مستشعرات
يعتمد نظام الاستشعار على زوج من الكاميرات المتطابقة مع محور خطوة واحدة...
 مفصلة ميكانيكية ذات محور واحد لنظام استشعار ANAFI Ai.
مفصلة ميكانيكية ذات محور واحد لنظام استشعار ANAFI Ai.
مواصفات المستشعر كالتالي:
- الموديل: Onsemi AR0144CSSM28SUD20
- اللون: أحادي اللون
- الدقة: 1280 × 800 بكسل
- معدل الإطار: 30 إطارًا في الثانية
- غالق شامل
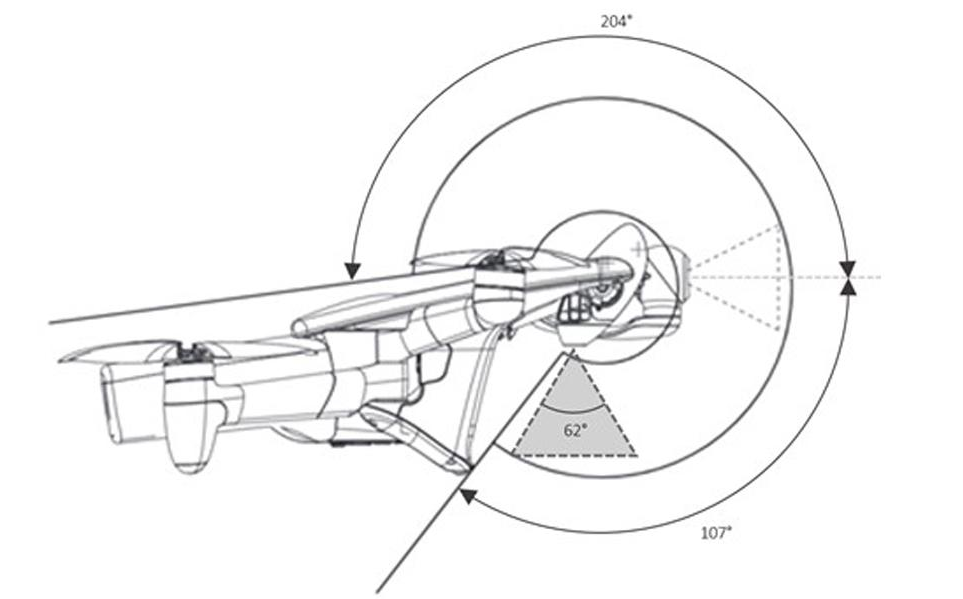
- مجال رؤية أفقي كامل: 118 درجة (110 درجة قابلة للاستخدام للاستشعار)
- مجال رؤية رأسي كامل: 72 درجة (62 درجة قابلة للاستخدام للاستشعار)
- الطول البؤري: 1.47 ملم (0.039 بوصة - 492.94610 بكسل)
- الفتحة: f / 2.7
المواصفات تكون الصور المجسمة كالتالي:
- محور النغمة المشترك
- خط الأساس / المسافة: 62 ملم (2.44 بوصة)
- الالتقاط المتزامن بمعدل 30 إطارًا في الثانية

ثنائي الانحراف
الانحراف الميكانيكي للكاميرا الرئيسية هو دوران ميكانيكي ثلاثي المحاور l-yaw "بالخصائص التالية:
- حدود الملعب: -116 درجة / 176 درجة
- حدود التدحرج: / - 36 درجة
- حدود الانعراج: / - 48 درجة
التعليق الميكانيكي لنظام الاستشعار هو تعليق أحادي المحور بالخصائص التالية:
- توقفات نهائية في الملعب: -107 درجة / 204 درجة
- وقت السفر من محطة إلى أخرى: 300 مللي ثانية
نظام الاستشعار لديه حركة 311 درجة (منها 296 درجة غير مخفية بجسم الطائرة بدون طيار) ، مما يسمح بالتراجع المعرفة.
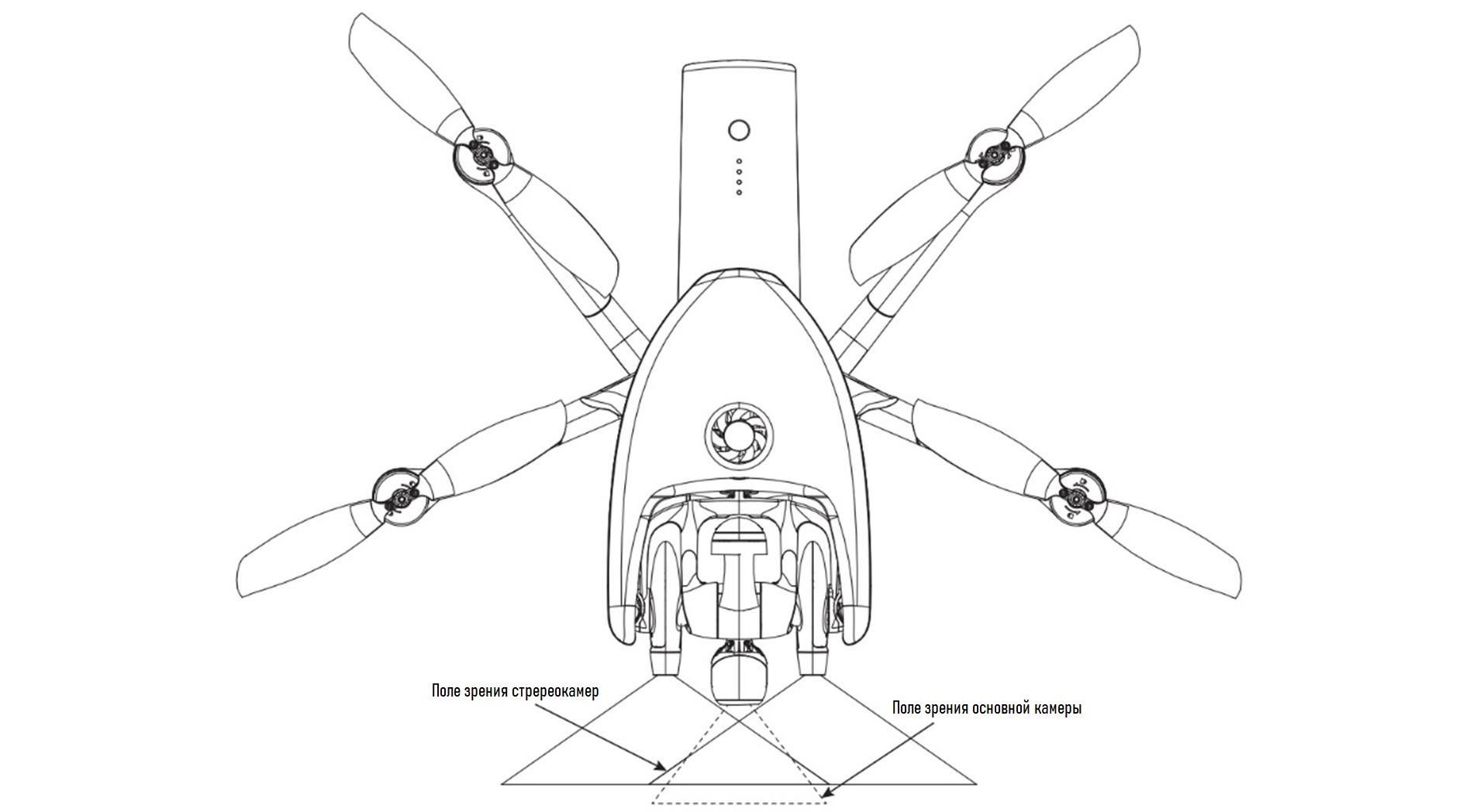
مجال رؤية رأسي لحظي وأنظمة محدودة للإدراك ANAFI Ai.
تم تصميم النظام بحيث:
- شفرات المروحة لا تدخل مجال رؤية الكاميرا الرئيسية
- لا تغطي الكاميرا مجال رؤية نظام الإدراك
- يمكن طي الكاميرا الرئيسية ونظام الاستشعار بالكامل للخلف لحماية العدسات
 مجال الرؤية الأفقي لنظام التصور ANAFI Ai.
مجال الرؤية الأفقي لنظام التصور ANAFI Ai.
عند الانحناء للخلف ، يتحرك نظام الإدراك إلى الموضع العلوي ، مما يوفر رؤية واضحة.
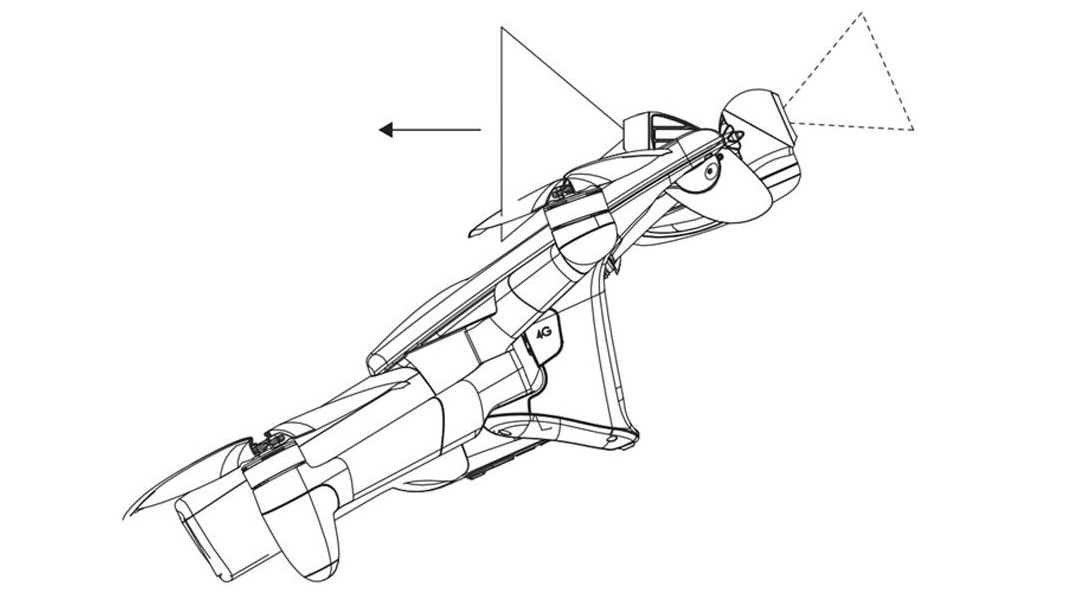
تصور ANAFI Ai في وضع متكئ تمامًا للطيران للخلف.
إعادة بناء البيئة
يتم تنفيذ إعادة بناء البيئة ثلاثية الأبعاد المحيطة للطيران المستقل على مرحلتين:
- ) استخراج معلومات العمق من الإدراك في شكل خرائط عمق
- دمج بيانات خريطة العمق في شبكة تعبئة ثلاثية الأبعاد
تُستخدم طريقتان للحصول على خرائط عمق من مستشعرات الإدراك:
- العمق استنادًا إلى محاذاة الاستريو
- العمق من الحركة
العمق من مراسلات الاستريو
الطريقة الرئيسية لاستخراج العمق تستند المعلومات إلى اختلاف المنظر بين كاميرتين ستريو لنظام الإدراك. من خلال تصوير البيئة في اتجاه واحد ، ولكن من موقعين مختلفين ، تظهر الأشياء في مجال رؤية نظام الإدراك في مواضع مختلفة في الصور التي تم الحصول عليها بواسطة كاميرتين. كلما اقترب الموضوع ، زاد الاختلاف في الموضع.
وبالتالي ، فإن الإستراتيجية هي تحديد النقاط في الصور التي تم الحصول عليها بواسطة الكاميرات المجسمة اليسرى واليمنى المقابلة لنفس الكائن في مجال رؤية نظام الاستشعار ، وقياس الاختلاف في موضع هذه النقاط في الصورتين. يسمى هذا الاختلاف التباين ويقاس بعدد وحدات البكسل.
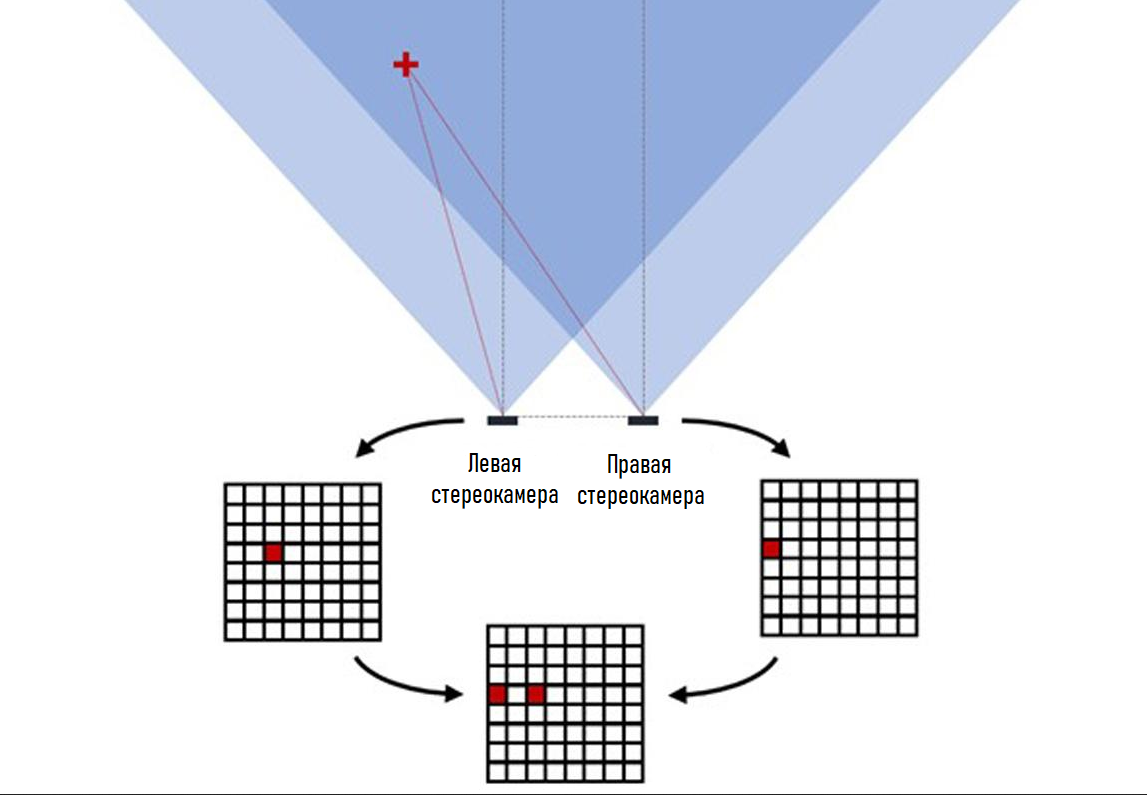 توضيح لمبدأ الرؤية المجسمة - النقطة الحمراء ثلاثية الأبعاد في مواضع مختلفة على الصور اليمنى واليسرى.
توضيح لمبدأ الرؤية المجسمة - النقطة الحمراء ثلاثية الأبعاد في مواضع مختلفة على الصور اليمنى واليسرى.
يمكن بعد ذلك ربط التباين بعمق كل نقطة من هذه النقاط باستخدام عمق العلاقة التالي = بؤري * خط الأساس / التباين ، حيث يتم التعبير عن العمق وخط الأساس في نفس الوحدات ، والبؤرة يتم التعبير عن الطول والتباين في عدد وحدات البكسل.
تأخذ نتيجة الحساب شكل خريطة عمق 176 × 90 بكسل ، والتي تتوافق فيها قيمة كل بكسل مع العمق بالأمتار. يتم تحديث خريطة العمق عند 30 هرتز.
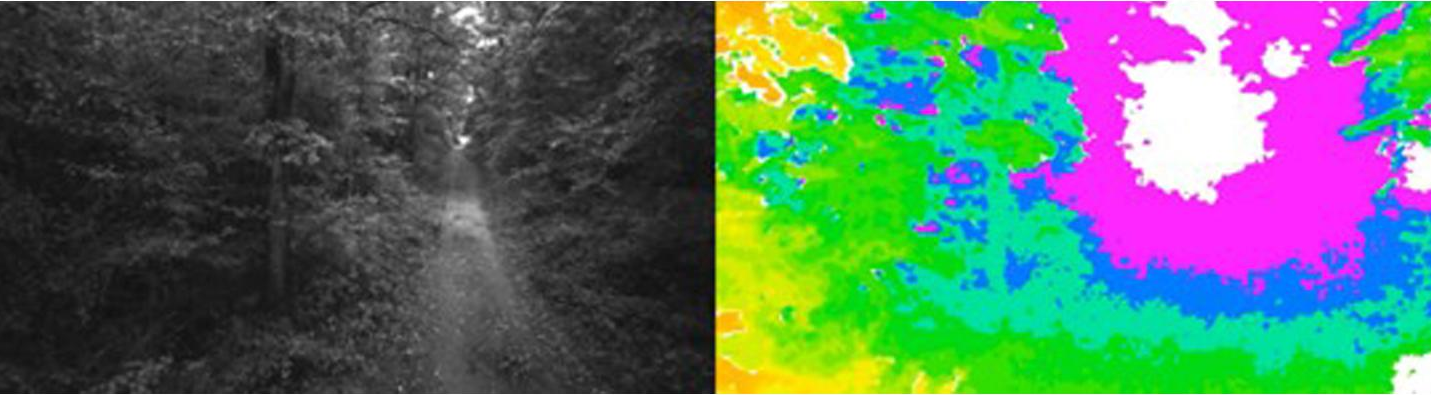
مثال على صورة تم التقاطها بالكاميرا اليمنى لنظام استشعار ANAFI Ai (يسار) والعمق المقابل الذي تم الحصول عليه باستخدام التصوير المجسم (يمين). تنتقل خريطة الألوان من الأحمر (أقرب) إلى اللون الأرجواني (أبعد) - الأبيض يعني خارج نطاق الوصول.
والنتيجة المباشرة لذلك هي أن العمق المقاس بهذه الطريقة يتم تقديره ، نظرًا لأن التباين يمكن أن يأخذ قيمًا منفصلة فقط (عدد وحدات البكسل). ستُعتبر النقطة ثلاثية الأبعاد التي تقع بعيدًا بدرجة كافية عن نظام الإدراك وخلق تباين نظري أقل من بكسل واحدًا غير محدود ، نظرًا لأن التباين الفعلي المنفصل المقابل سيكون مساويًا لـ 0. تنخفض دقة طريقة مقارنة الاستريو مع زيادة المسافة ، على الرغم من وجود هي طرق يمكن أن تقلل من هذه الظاهرة من خلال تحقيق أخذ عينات البكسل الفرعي.
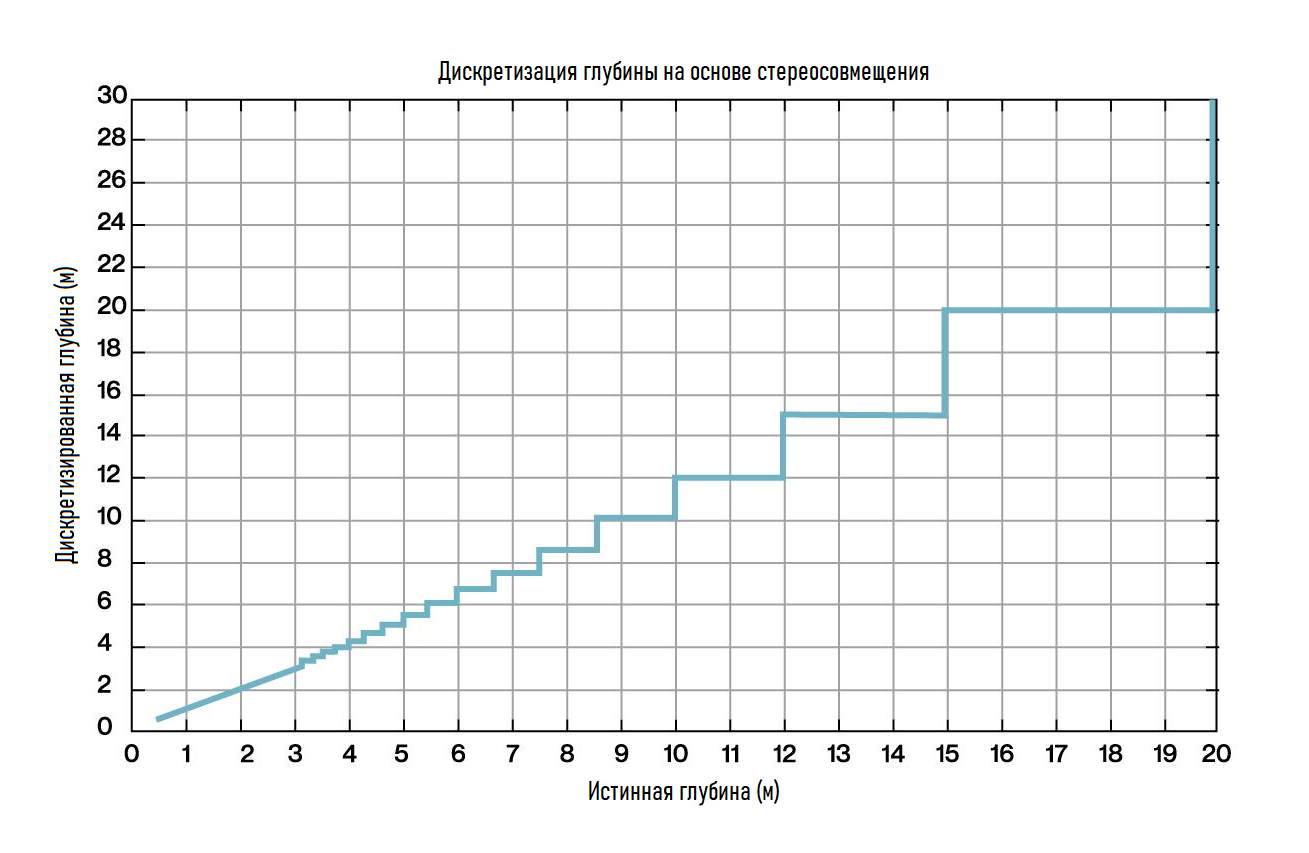 عمق متقطع كما تم قياسه بواسطة "محاذاة ستريو" مقابل "عمق حقيقي".
عمق متقطع كما تم قياسه بواسطة "محاذاة ستريو" مقابل "عمق حقيقي".
بالإضافة إلى ذلك ، يتباعد التباين كلما اقترب العمق من الصفر.نظرًا لأن عدد وحدات البكسل في الصور محدود ، فإن قيمة التباين محدودة أيضًا. نتيجة لذلك ، هناك حد أدنى من العمق يكون فيه النظام الإدراكي أعمى. هذا الحد الأدنى للعمق هو 36 سم لـ ANAFI Ai.
حول المعايرة: تمت معايرة كل زوج من كاميرات الاستريو في المصنع لقياس الاختلافات الصغيرة التي قد توجد بين الكاميرتين بدقة وتعويضها في حسابات العمق على متن الطائرة.
يمكن للمستخدم أيضًا إعادة معايرة زوج من كاميرات الاستريو باستخدام نموذج الاختبار المزود مع الطائرة بدون طيار. على وجه الخصوص ، إلى حد ما ، يمكن للطائرة بدون طيار اكتشاف أخطاء المعايرة المحتملة التي قد تنشأ خلال حياتها. في هذه الحالة ، سيحاول برنامج الطائرة تعديلها والتعويض عنها ، وإذا فشل ذلك ، فسيظهر إشعار يطلب منك إعادة المعايرة.
العمق من الحركة
يمكن أيضًا استخدام حركة الطائرة بدون طيار لجمع صور البيئة من زوايا مختلفة وبالتالي إعادة بناء معلومات العمق. تسمى هذه التقنية العمق من الحركة ، أو الاستشعار الأحادي ، لأن كاميرا متحركة واحدة كافية لجمع معلومات العمق.
يشبه مبدأ التشغيل رؤية الاستريو ، ولكن بدلاً من مقارنة صور البيئة التي حصل عليها مراقبون مختلفون في نفس الوقت ، يقارن الإدراك صور البيئة التي حصل عليها نفس المراقب في أوقات مختلفة. إذا كانت الطائرة بدون طيار تتحرك ، فسيتم التقاط الصور من هذا المراقب الفريد من زوايا مختلفة. بمعرفة الموضع الذي تم فيه التقاط كل إطار ، من الممكن تثليث النقاط المقابلة لنفس الميزة في صور مختلفة وإعادتها إلى ثلاثي الأبعاد.
الناتج عبارة عن سحابة نقطية ثلاثية الأبعاد تحتوي على ما يصل إلى 500 نقطة لـ ANAFI Ai ، ولدت بتردد 10 هرتز.
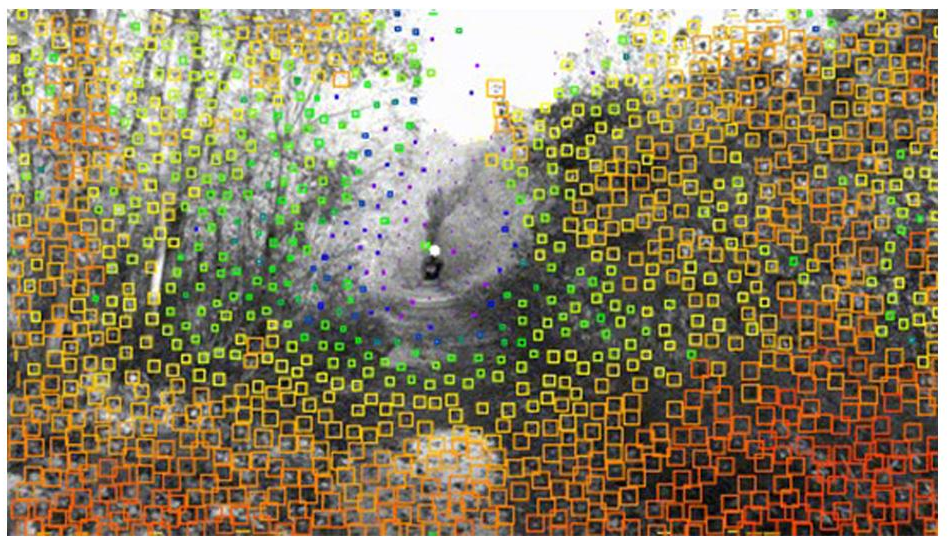 مثال على سحابة نقطية تم إنشاؤها بناءً على العمق من الحركة - تنتقل خريطة الألوان من الأحمر (أقرب) إلى اللون الأرجواني (أبعد).
مثال على سحابة نقطية تم إنشاؤها بناءً على العمق من الحركة - تنتقل خريطة الألوان من الأحمر (أقرب) إلى اللون الأرجواني (أبعد).
عادةً ما تولد خوارزمية ANAFI Ai Motion Depth معلومات أقل (سحابة نقطية متفرقة) من خوارزمية مطابقة الاستريو وتتطلب من الطائرة بدون طيار التحرك لجمع المعلومات. بالإضافة إلى ذلك ، لا يمكن لهذه الخوارزمية استخراج المعلومات في الاتجاه الدقيق للحركة (على الأقل للبث المباشر) ، حيث تظهر الكائنات الموجودة في الصور ثابتة تقريبًا في هذا الاتجاه (تركيز التمدد).
ومع ذلك ، لديها نطاق اكتشاف أفضل (نطاق غير محدود نظريًا) من مطابقة الاستريو.
ملء الشبكة
تم دمج معلومات العمق من خوارزميات الاستشعار المجسم والأحادي في شبكة التعبئة. تقوم هذه الشبكة بتجميع البيئة ثلاثية الأبعاد في مكعبات ثلاثية الأبعاد تسمى وحدات البكسل. يتم تعيين احتمال احتلال كل فوكسل بواسطة عقبة أو ، على العكس من ذلك ، التحرر من أي عقبة.
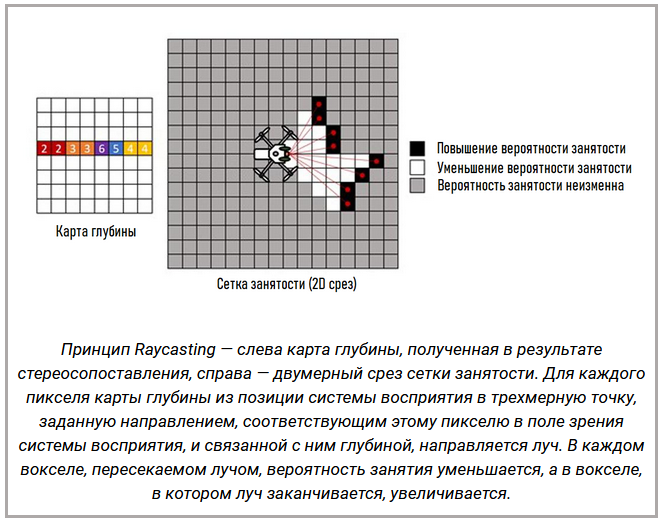
تُستخدم خوارزمية إرسال الأشعة لدمج معلومات العمق في شبكة تعبئة. لكل بكسل من خريطة العمق التي تم الحصول عليها نتيجة للمقارنة المجسمة ، يتم تحويلها إلى نقطة ثلاثية الأبعاد ، ولكل نقطة من نقطة السحابة - إلى العمق الذي تم الحصول عليه نتيجة للحركة:
- يتم رسم شعاع في شبكة التعبئة من موضع نظام الإدراك إلى موضع النقطة ثلاثية الأبعاد.
- تزداد احتمالية احتواء فوكسل على نقطة ثلاثية الأبعاد.
- تقل احتمالية احتلال جميع وحدات البكسل التي يعبرها شعاع بخلاف تلك التي تحتوي على النقطة ثلاثية الأبعاد.
وبالتالي ، تعمل الشبكة كمرشح زمني لمعلومات العمق ، وتمتص أي ضوضاء محتملة في قياس العمق ، وكذاكرة للقياسات السابقة ، مما يسمح يمكنك التنقل في البيئات الصعبة حتى في حالة عدم وجود مجال رؤية مستمر بزاوية 360 درجة لنظام الإدراك.
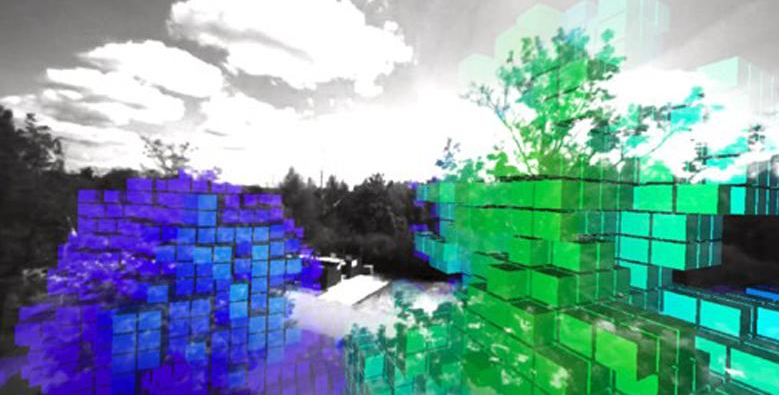 مثال لشبكة التعبئة. يتم تثبيت Voxels على عرض الكاميرا الاستريو الصحيح بدرجة عالية من اليقين بأنهم مشغولون ، بدءًا من الأحمر (القريب) إلى الأرجواني (البعيد).
مثال لشبكة التعبئة. يتم تثبيت Voxels على عرض الكاميرا الاستريو الصحيح بدرجة عالية من اليقين بأنهم مشغولون ، بدءًا من الأحمر (القريب) إلى الأرجواني (البعيد).
شبكة الملء هي الأساس لخوارزميات تخطيط الحركة المستخدمة بواسطة ANAFI Ai للطيران المستقل وتجنب العوائق.
تجنب العقبات
بفضل معرفة البيئة ثلاثية الأبعاد للطائرة بدون طيار المخزنة في شبكة الملء ، يمكن لـ ANAFI Ai تجنب العقبات. يوفر هذا أمانًا إضافيًا مهمًا للمهام المستقلة ، ولكنه مفيد أيضًا في الرحلة اليدوية ، خاصةً إذا كان خط الرؤية بين الطيار والطائرة معطلاً.
كل 30 مللي ثانية تتنبأ ANAFI Ai بالأفق الزمني القصير الاسمي في المستقبل. يتم الاستدلال على هذا التوقع من الروابط التي أرسلها المستخدم ، سواء كانت أوامر طيران من جهاز التحكم عن بعد ، أو نقاط مسار لإرفاقها بخطة طيران ، أو مسار إدخال. بعد ذلك ، باستخدام نموذج محاكاة الطائرة بدون طيار الداخلية ، تحسب خوارزمية إعادة الجدولة أصغر التصحيحات الممكنة لهذا المسار الاسمي المتوقع مما يجعله خاليًا من الاصطدام ومجديًا للطائرة بدون طيار.
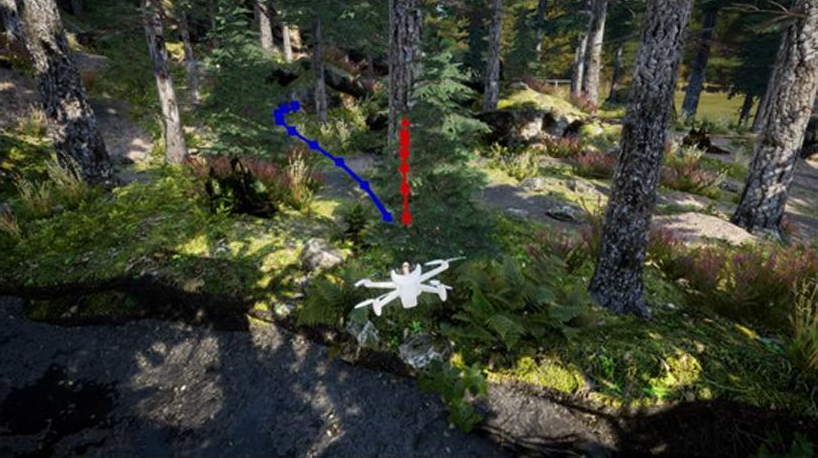 مثال على المسار المصحح محسوبًا بواسطة خوارزمية تجنب العوائق ردًا على اصطدام المسار المرجعي بشجرة.
مثال على المسار المصحح محسوبًا بواسطة خوارزمية تجنب العوائق ردًا على اصطدام المسار المرجعي بشجرة.
تم تصميم نظام تجنب عقبة ANAFI Ai ليعمل بسرعات تصل إلى:
- رحلة المستوى: 29 كم / ساعة
- تسلق: 14 km / h
- النزول: 11 km / h
أداء التجنب محدود في المطر أو الرياح القوية أو الإضاءة المنخفضة أو تعطل الملاحة عبر الأقمار الصناعية. بالإضافة إلى ذلك ، قبل الطيران ، يجب التأكد من نظافة عدسات نظام الاستشعار.
رحلات الطيران

الميزات الرئيسية
الهواء SDK (انظر.قسم SDK) يتيح للمطورين الوصول إلى كل مستشعر للطائرة بدون طيار وكاميرا وواجهة اتصال ووظيفة قائمة بذاتها. لذلك ، يمكنهم تخصيص سلوك الطائرة بدون طيار لإنشاء مهام طيران. تحتوي كل مهمة طيران على مجموعة من السلوكيات أو الأوضاع الأساسية:
- على الأرض: السلوك عند إيقاف المحركات ، مثل معايرة المستشعر.
- الإقلاع: استراتيجيات إقلاع متنوعة
- تحوم: تحمل نقطة ثابتة
- رحلة: دليل الوظائف والطيران المستقل
- الهبوط: استراتيجيات هبوط مختلفة
- حرجة: عند اكتشاف حالة حرجة
يمكن لمهمات الطيران المخصصة إنشاء سلوكيات جديدة أو إعادة استخدامها من المهمة الافتراضية.
السعر والتوافر
من المقرر بدء مبيعات طائرة ANAFI Ai في سبتمبر 2021. لم يتم الكشف عن معلومات السعر في الوقت الحالي. نواصل مراقبة المعلومات الواردة وسنقوم بالتأكيد بتحديث هذا القسم في وقت لاحق.

وثائق للتحميل
وثائق للتعرف على المنتج من المطور:
مقاطع الفيديو[1455)]أعلى التقييمات ANAFI Ai من المطور والمستخدمين
التفريغ والرحلة الأولى.
رحلة تجريبية للطائرة بدون طيار في المدى مع اتصال 4G. كان إجمالي زمن الرحلة 29 دقيقة بمتوسط سرعة طيران أفقية تبلغ 58 كم / ساعة (16 م / ث). خلال هذا الوقت ، تمكنت الطائرة بدون طيار من تغطية 27 كم. يمكنك أيضًا ملاحظة أن الرحلة تمت في ظروف رياح قوية ، والتي تم تحذيرها باستمرار من قبل نظام الطائرات بدون طيار.
.






