Indledning
Antallet af mennesker, der besluttede at beherske dronekontrol og generelt er interesseret i denne hobby, vokser hvert år inden for aritmetisk udvikling i hele verden. 2017 var ingen undtagelse, og med det nye års begyndelse var den hyppigst stillede forespørgsel i internetsøgemaskiner spørgsmålet: "Sådan styrer du en quadrocopter?" Dette bekræfter igen det faktum, at den mest forventede gave i det nye år var - drone.

Inden du begynder at afsløre emnet sikker pilotering, er det værd at bemærke følgende, at der ikke er nogen, der var i stand til at mestre dronekontrol første gang. Alle, der først kom til denne hobby, starter med de klodsede flyvninger og fejl fra en nybegynder, og som regel er de stort set ens for alle. Men det er værd at huske, at det er begyndere, der er afhængige af erfaringer fra professionelle, der i sidste ende bringer noget nyt, og at hver ny generation altid vil være bedre end dem, der stod ved oprindelsen til udviklingen af denne eller den hobby.
Denne artikel er en indledende hurtigguide, der henvender sig til begyndere, der ønsker at lære at flyve ubemandede luftfartøjer korrekt og sikkert.
Hvor skal man starte?
Drone -pilot er en sjov og relativt ny og hurtigt udviklende hobbytype, som der ikke er meget information om i øjeblikket, især for folk, der lige er begyndt at lære om UAV'er. Som et resultat udføres den første flyvning på egen risiko og risiko, hvilket ikke er sikkert for både piloten og menneskerne omkring opsendelsesstedet. Det er værd at huske, at en drone
- For at minimere alle former for risici skal du først og fremmest overholde de grundlæggende regler: undgå at flyve i umiddelbar nærhed af mennesker og ejendom samt krydser ikke flyvezoner - "Ingen flyvning".
- Zoner "No Fly" - territorier, hvis flyvning er forbudt! Omkredsen af disse zoner omfatter normalt lufthavne, militære enheder, stadioner osv.

Hvad skal være den første drone?
Det er bedst at starte med en drone med fire rotorer / propeller, eller simpelthen med en quadcopterRTF - klar til at flyve )... Det betyder, at brugeren efter udpakning ikke skal beskæftige sig med at samle / eftermontere modellen. Tændte og fløj.
Dyrt eller billigt?
Bedre at starte med quadrics op til $ 50. For det første er sådanne droner tænkt til at være lette og små i størrelse, hvilket betyder, at de ikke kan forårsage betydelig skade på mennesker eller ejendom. For det andet vil det være meget mere ubehageligt at miste en $ 500 -drone på grund af manglende pilotfærdigheder end en $ 50 -drone. Som praksis viser, vil en nybegynder derudover ikke være i stand til at udnytte det fulde potentiale i en $ 500 -drone. Husk, at i denne hobby skal du starte simpelt!

Kontroludstyr
I de fleste tilfælde har dronens kontrolpanel de vigtigste betjeningselementer: venstre og højre pind / joystick til styring af dronen og en antal ekstra knapper og AUX –Switches (2/3-vejs), som ofte bruges til at skifte mellem flyvetilstande, tænde og slukke lysdioder osv.
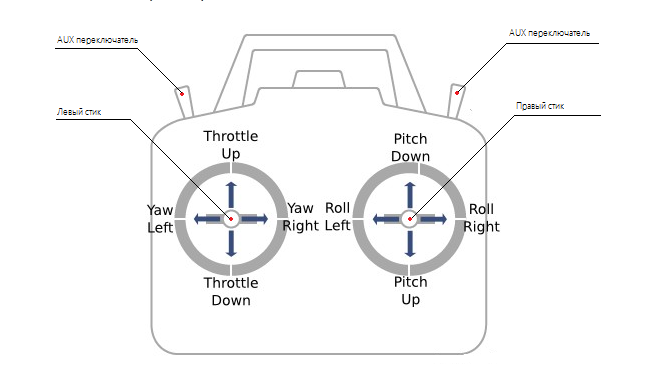
* Ordning med klassisk udstyr.
Sådan styrer du en quadcopter?
Formålet med venstre og højre pind:
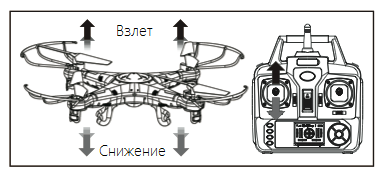
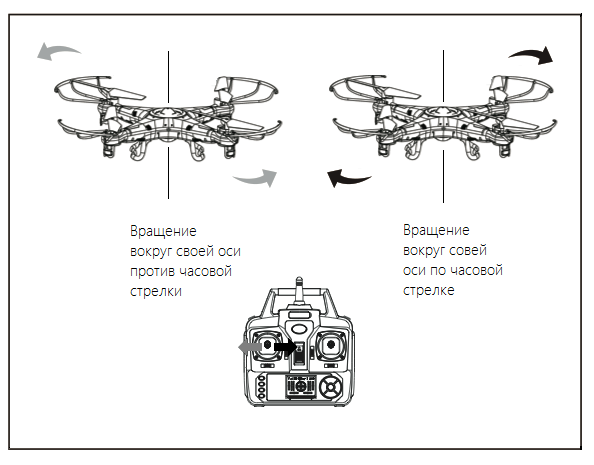
Venstre pind - ansvarlig for start og nedstigning af dronen, samt for rotation omkring dens akse.
- Throttle Up - gashåndtag, øger motorhastigheden (når man bevæger sig opad, tager dronen fart).
- Throttle Down - bremse, reducerer motorernes hastighed (ved nedadgående bevægelse falder dronen).
- Yaw Left - når det bevæger sig til venstre, roterer flyet rundt om sin akse mod uret.
- Yaw Right - når det bevæger sig til højre, roterer flyet rundt i retning med uret.
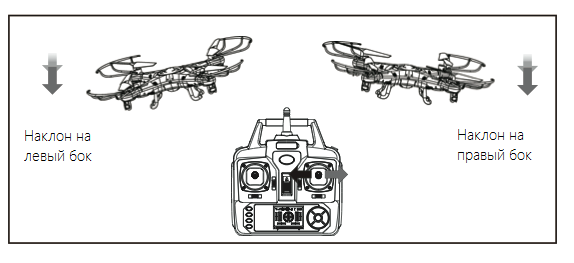
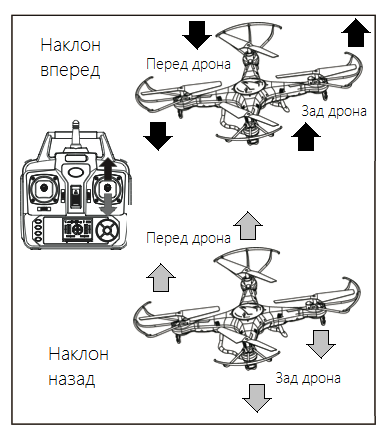
Højre pind - ansvarlig for "Pitch" og "Roll" v. e. vippe dronen til venstre og højre side, såvel som frem og tilbage (piloten indstiller flyveretningen med højre pind).
- Rul til venstre - vipper dronen til venstre side (mens dronen bevæger sig til venstre side langs horisonten).
- Rul til højre - vipper dronen til højre side (mens dronen bevæger sig til højre side langs horisonten).
- Slå ned - når pinden flyttes op, vippes dronen fremad (dronen begynder at bevæge sig foran).
- Pitch Up - når du flytter pinden nedad, vipper den dronen baglæns (dronen begynder at bevæge sig bagud).
Drone flight modes
Der er forskellige flyvetilstande afhængigt af flyvekontrolleren installeret i dronen (PC / Flight Controller): KK2 / Multiwii / Naze32 / ArduCopter og andre). De mest almindelige tilstande er:
"Acro mode" (Rate mode / Manual mode) - i disse modes deaktiveres de elektroniske assistenter, der er ansvarlige for at stabilisere flyet. Hastighedsindikatorerne når deres maksimale værdier. Pilotering kan kun udføres af avancerede piloter. Det anbefales for begyndere at begynde at lære at flyve i acro -tilstand med FPV -simulatorer.
"Selvniveautilstand" (horisonttilstand) - i disse tilstande er elektronikken, der er ansvarlig for at stabilisere dronen (gyroskop, accelerometer) aktive, begrænsede omkostninger (hastighedsindikatorer). Tilstande er velegnede til pilottræning.
Attitude Holding Mode - denne flyvetilstand styres af indbygget elektronik, der er ansvarlig for at stabilisere dronen, højdeholdingsfunktionen er aktiv, implementeret ved hjælp af en tryksensor (barometer). Mens piloten i denne tilstand flyver, vil piloten ikke falde, som den kunne ved brug af ovenstående tilstande, men vil svæve i den besatte højde på flyvetidspunktet, hvis piloten slipper pinde / joysticks. Piloten bliver nødt til at kontrollere copterens vandrette forskydning / afdrift, f.eks. På grund af den tilstedeværende vind. Tilstanden vil blive værdsat af begyndere, men ikke desto mindre bør du ikke bruge den, når du underviser i pilot, da den opnåede erfaring ikke vil være komplet.
GPS Attitude Holding Mode - fungerer med direkte deltagelse af GPS -modulet. Denne flyvetilstand styres af den indbyggede elektronik, der er ansvarlig for at stabilisere dronen. Funktionen med at holde positionen, realiseret ved hjælp af GPS, er aktiv. Dronen låser til et koordinatpunkt og giver dig mulighed for at svæve præcist uden forskydning / drift, selvom den er påvirket af eksterne faktorer som vind. Han modtog den største anerkendelse inden for luftfotografering, da det frigør piloten fra konstant kontrol over den højde, som dronen besætter, og derved tillader ham at fokusere på at opnå foto- / videomateriale i høj kvalitet.
I praksis finder du mange flere flyveformer. Som nævnt ovenfor afhænger dette af flyvekontrolleren installeret i dronen. Men algoritmen for arbejde generelt vil være ens for alle.

Grundlæggende flyveregler
Her taler vi om, hvilke regler der skal følges før og under den første flyvning. Sikkerhed kommer først!
- Vælg en god vindstille dag til at flyve.
- Flyveområdet skal være et stort åbent område uden bygninger eller elledninger.
- Sørg for, at der ikke er mennesker, dyr, ejendomme i stedet for opsendelsen og flyvningen.
- Inden opsendelsen skal du kontrollere luftfartøjet for eventuelle funktionsfejl / skader, forkert / løse propeller, propelværn, kameraer osv.
- Prøv at minimere eventuelle faktorer, der kan distrahere dig under flyvningen, såsom at indstille din mobiltelefon til lydløs tilstand osv.
Første flyvning
Efter at have sikret sikkerheden kan du gå videre til praktiske træningsflyvninger. Du skal starte enkelt, og først og fremmest skal du regne ud følgende:
- Øv start og svæv i luften i en højde på op til to meter, efterfulgt af landing.
- Tag korte flyvninger fra punkt "A" til punkt "B" og land derefter.
- Opnå selvsikker, stabil pilotering med de to første trin.

Praktiske råd
Vindhastighed
Vindhastighed er den første indikator, du skal være opmærksom på, før du flyver ind det fri. Flyv ikke, hvis vindhastigheden er højere - 6 m / s. Selv med en sådan vind vil dronen ikke være stabil under flyvning, og den skal konstant justeres, hvilket er særligt svært for en nybegynder. Når vindhastigheden overstiger 11 meter i sekundet, risikerer piloten at styrte med dronen.
Øvelse i at svæve
I praksis er "svævende (holdestilling)" meget vanskeligere, end det umiddelbart kan se ud. Især når flyvningen udføres i førstepersonsvisning (FPV)
Gashåndtag
Hvad gør du, hvis et træ pludselig er i din drones vej med høj hastighed? Nogen vil sige: "Jeg klæder ham bare, og det er det." Men i praksis er der nogle gange ikke tid til at flyve rundt, og en klog beslutning i en sådan situation ville være at simpelthen nulstille gassen til nul. Således kan du reducere sandsynligheden for maksimal skade på både dronen / rammen og dens individuelle elementer, såsom motorer, antenner osv. Betydeligt. Det er også værd at huske på, at du ikke bør ignorere brugen af rotorbeskyttere, som ofte er inkluderet i sættet, især på tidspunktet for træning til at flyve, selvom de reducerer copterens flyveegenskaber betydeligt.
FPV -simulatorer
FPV -simulatorer giver dig mulighed for at minimere omkostningerne forbundet med ødelæggelsen af dronen som følge af nedbrud, hvilket er særligt vigtigt i de indledende faser af pilottræning. Det er med FPV -simulatorer, at det anbefales at begynde bekendtskab med dronekontrol for begyndere. Vi anbefaler vores separate materiale, der maksimalt afslører emnet for moderne FPV -simulatorer

Konklusion
Desværre er kollisioner og fald (nedbrud) i vores hobby uundgåelige for både begyndere og professionelle. Og det bedste du kan gøre er at lære at minimere disse begivenheder. Husk, at alt kommer af den oplevelse, du udelukkende får i processen med at øve. Jo flere flyvetimer, jo flere muligheder åbner sig, før du styrer dronen.
I denne korte begynderguide kunne vi forhåbentlig formidle den mest komplette forståelse af, hvad vi skal kigge efter, når vi lærer at flyve med en drone i begyndelsen. Selvfølgelig er det ikke muligt at passe hele studieforløbet til en artikel, men hvis dette ikke er nok for dig, så råder vi dig til at tage specialkurser om undervisning i UAV -pilotering i specialiserede uddannelsesinstitutioner i nærheden af dig, da sådanne allerede er ledig.
Video
Et illustrerende eksempel på pilotering af en drone.
.






