简介
决定掌握无人机控制并普遍对这一爱好感兴趣的人数在世界范围内以等差数列形式逐年增加。 2017年也不例外,随着新年的到来,互联网搜索引擎中最常被问到的问题是:“如何控制直升机?”这再次印证了新年最期待的礼物是——(3)无人机。

在开始公开安全驾驶的话题之前,值得注意的是,没有人第一次能够掌握无人机控制。最初接触这个爱好的每个人都从初学者的笨拙飞行和错误开始,通常,它们对所有人来说基本相同。但值得记住的是,依靠专业人士的经验,最终带来新事物的是初学者,而每一代人都将永远比那些站在这种或那种爱好发展的起源上的人更好。
本文是针对初学者的入门快速指南,旨在学习如何正确安全地驾驶无人机。
从哪里开始?
无人机驾驶是一种有趣且相对较新且发展迅速的业余爱好,目前关于它的信息并不多,尤其是对于刚开始了解无人机的人而言。因此,第一次飞行是由您自己承担风险和风险进行的,这对飞行员和发射场周围的人来说都是不安全的。值得记住的是(12)无人机是一种相当强大的机器,带有快速旋转的螺旋桨,如果使用不当,很容易破坏其完整性,从而威胁到整个设备的彻底故障。
- 为了尽量减少各种风险,首先要遵守基本规则:避免在人员和财产附近飞行,以及不穿越禁飞区——“禁飞”。
- “禁飞”区 - 禁止飞越的领土!这些区域的周边通常包括机场、军事单位、体育场等。

第一架无人机应该是什么?
最好从带有四个旋翼/螺旋桨的无人机开始,或者简单地使用 四轴飞行器RTF - 准备好飞 )...这意味着在打开包装后,用户无需处理组装/改装模型。开启并飞翔。
贵还是便宜?
最好从最高 50 美元的二次曲线开始。首先,此类无人机被认为重量轻且体积小,这意味着它们不会对人员或财产造成重大伤害。其次,由于缺乏驾驶技能而失去一架价值 500 美元的无人机会比一架价值 50 美元的无人机更令人不快。此外,实践表明,初学者将无法充分发挥价值 500 美元的无人机的潜力。请记住,在这个爱好中,您需要从简单开始!

控制设备
在大多数情况下,无人机的控制面板有主要控制:左右摇杆/操纵杆用于控制无人机和一个附加按钮和 AUX 开关(2/3 路)的数量,通常用于在飞行模式之间切换、打开和关闭 LED 等。
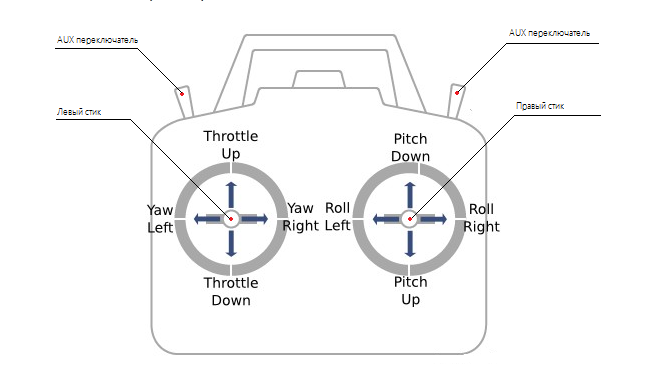
* 经典设备示意图。
如何控制四轴飞行器?
左右摇杆的用途:
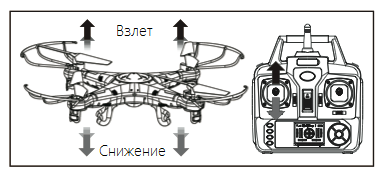
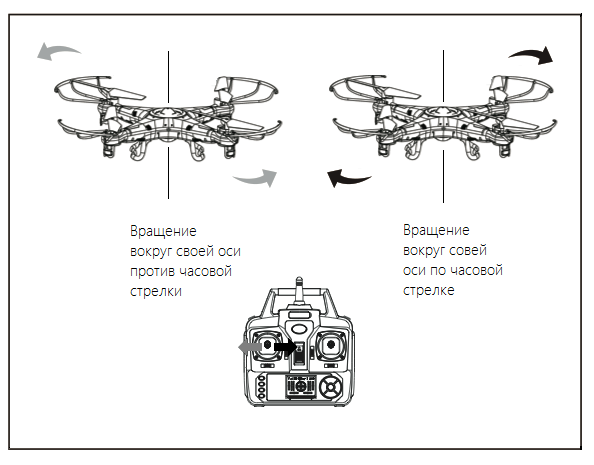
左摇杆 - 负责无人机的起飞和下降,以及绕其轴线旋转。
- Throttle Up - 加油,提高发动机速度(向上移动时,无人机起飞)。
- 油门下降 - 制动,降低电机速度(向下移动时,无人机下降)。
- 向左偏航 - 当向左移动时,飞机绕其轴逆时针旋转。
- Yaw Right - 向右移动时,将飞机绕其顺时针方向旋转。
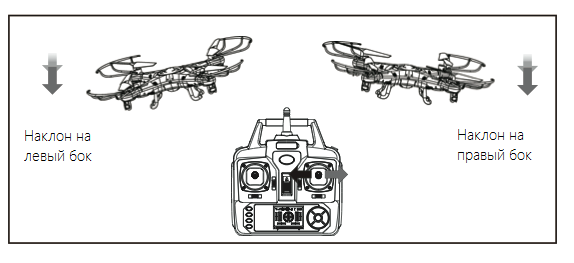
右摇杆 - 负责 “Pitch” 和 “Roll” v. e.将无人机向左右两侧倾斜,以及向前和向后倾斜(飞行员使用右摇杆设置飞行方向)。
- 向左滚动 - 将无人机向左侧倾斜(同时无人机将沿地平线向左侧移动)。
- Roll Right - 将无人机倾斜到右侧(同时无人机将沿地平线移动到右侧)。
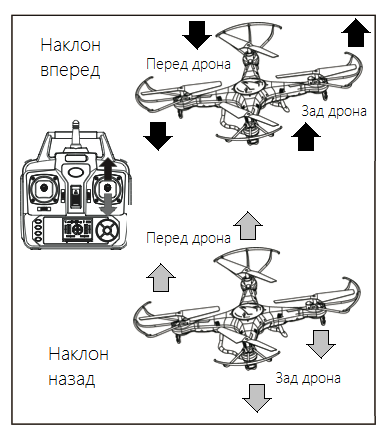
- Pitch Down - 向上移动操纵杆时,将无人机向前倾斜(无人机将开始向前移动).
- Pitch Up - 当您向下移动操纵杆时,它会使无人机向后倾斜(无人机将开始向后移动)。
无人机飞行模式
根据安装在无人机中的飞行控制器(PC / Flight Controller)有不同的飞行模式:KK2 / Multiwii / Naze32 / ArduCopter 等)。最常见的模式是:
“Acro 模式”(速率模式/手动模式) - 在这些模式下,负责稳定飞机的电子助手将被禁用。速度指示器将达到最大值。驾驶只能由高级飞行员进行。建议初学者使用 FPV 模拟器 开始学习在 acro 模式下飞行。
“自水平模式”(水平模式) - 在这些模式下,负责稳定无人机的电子设备(陀螺仪、加速度计)是活跃的,成本有限(速度指示器)。模式非常适合驾驶培训。
姿态保持模式 - 这种飞行模式由负责稳定无人机的机载电子设备控制,高度保持功能处于活动状态,通过压力传感器(气压计)实现。在这种模式下飞行时,如果飞行员释放操纵杆/操纵杆,quad 不会像使用上述模式时那样下落,而是会悬停在飞行时占据的高度。例如,由于存在风,飞行员将需要控制直升机的水平位移/漂移。该模式将受到初学者的青睐,但是,您不应在教授驾驶时使用它,因为所获得的经验并不完整。
GPS 姿态保持模式 - 在 GPS 模块的直接参与下工作。这种飞行模式由负责稳定无人机的机载电子设备控制。通过 GPS 实现的保持位置功能处于活动状态。无人机锁定到一个坐标点,即使受到风等外部因素的影响,也可以让您准确悬停而不会发生偏移/漂移。他获得了航空摄影的主要认可,因为它使飞行员摆脱了对无人机占据的高度的持续控制,从而使他能够专注于获取高质量的照片/视频材料。
在实践中,你会发现更多的飞行模式。如上所述,这取决于无人机中安装的飞行控制器。但一般来说,工作算法对每个人来说都是相似的。

基本飞行规则
这里我们说一下在首次飞行之前和期间应该遵循哪些规则。安全第一!
- 选择一个无风的好日子飞行。
- 飞行区应该是一个没有建筑物或电源线的大面积空地。
- 确保发射和飞行地点没有人、动物、财产。
- 起飞前,检查飞机是否有任何故障/损坏、不正确/松动的螺旋桨、螺旋桨护罩、摄像头等。
- 尽量减少飞行过程中可能分散您注意力的任何因素,例如将您的手机设置为静音模式等。
首飞
确保安全后,即可进行实训飞行。你需要从简单的开始,首先,计算出以下内容:
- 在高达两米的高度练习起飞和悬停,然后着陆。
- 从“A”点短程飞行到“B”点,然后降落。
- 通过前两个步骤实现自信、稳定的驾驶。

实用建议
风速
风速是飞行前需要注意的第一个指标露天。如果风速更高 - 6 m / s,请勿飞行。即使有这样的风,无人机在飞行中也不会稳定,需要不断调整,这对于初学者来说尤其困难。当风速超过每秒 11 米时,飞行员就有坠毁无人机的风险。
练习悬停
在实践中,“悬停(保持位置)”比乍一看要困难得多。特别是当飞行以第一人称视角 (FPV)
油门
如果一棵树突然出现在您的无人机高速行驶的路径上,您会怎么做?有人会说:“我给他穿衣服就行了。”但在实践中,有时没有时间飞来飞去,在这种情况下明智的决定是简单地将气体重置为零。因此,您可以显着降低对无人机/框架本身及其各个元件(如电机、天线等)造成最大损坏的可能性。还值得一提的是,您不应忽视旋翼护罩的使用,这些护罩通常包含在套件中,尤其是在训练飞行时,即使它们会显着降低直升机的飞行特性。
FPV 模拟器
FPV 模拟器可让您最大限度地减少因坠机而导致无人机损坏的相关成本,这在驾驶培训的初始阶段尤为重要。建议初学者从FPV模拟器开始熟悉无人机控制。 我们推荐我们单独的材料,最大限度地揭示现代 FPV 模拟器的主题 。

结论
不幸的是,无论是初学者还是专业人士,在我们的爱好中碰撞和跌倒(碰撞)都是不可避免的。你能做的最好的事情就是学会尽量减少这些事件。请记住,一切都来自您仅在练习过程中获得的体验。飞行时间越长,您控制无人机的机会就越多。
希望在这个简短的初学者指南中,我们能够传达最完整的理解,了解在初始阶段学习驾驶无人机时要寻找什么。当然,不可能把整个学习过程写成一篇文章,但如果这对你来说还不够,那么我们建议你在你附近的专业教育机构学习无人机驾驶教学的专题课程,因为这已经是可用。
视频
驾驶无人机的示例。
。






