Inleiding
Het aantal mensen dat besloten heeft om drone-besturing onder de knie te krijgen en in het algemeen geïnteresseerd is in deze hobby, groeit elk jaar in rekenkundige vooruitgang over de hele wereld. 2017 was geen uitzondering en met het begin van het nieuwe jaar was de meest gestelde vraag in internetzoekmachines de vraag: "Hoe bestuur je een quadrocopter?" Dit bevestigt nogmaals het feit dat het meest verwachte geschenk in het nieuwe jaar - drone was.

Alvorens te beginnen met het onthullen van het onderwerp veilig besturen, is het de moeite waard om het volgende op te merken dat er geen mensen zijn die de drone-besturing de eerste keer onder de knie hebben. Iedereen die voor het eerst bij deze hobby kwam, begint met de onhandige vluchten en fouten van een beginner en in de regel zijn ze in principe voor iedereen hetzelfde. Maar het is de moeite waard eraan te denken dat het de beginners zijn, die vertrouwen op de ervaring van professionals, die uiteindelijk iets nieuws brengen en dat elke nieuwe generatie altijd beter zal zijn dan degenen die aan de basis stonden van de ontwikkeling van deze of gene hobby.
Dit artikel is een eerste beknopte handleiding voor beginners die willen leren hoe ze goed en veilig met onbemande luchtvaartuigen kunnen vliegen.
Waar te beginnen?
Het besturen van een drone is een leuke en relatief nieuwe en zich snel ontwikkelende hobby, waarover op dit moment niet veel informatie is, vooral voor mensen die net beginnen te leren over UAV's. Hierdoor wordt de eerste vlucht op eigen risico uitgevoerd, wat niet veilig is voor zowel de piloot als de mensen rond de lanceerplaats. Het is de moeite waard om te onthouden dat een drone
- Om alle soorten risico's tot een minimum te beperken, dient u zich allereerst aan de fundamentele regels te houden: vlieg niet in de onmiddellijke nabijheid van personen en eigendommen, evenals niet oversteken van no-fly zones - "No Fly".
- Zones "No Fly" - gebieden waarvan de vlucht verboden is! De omtrek van deze zones omvat meestal luchthavens, militaire eenheden, stadions, enz.

Wat zou de eerste drone moeten zijn?
Het is het beste om te beginnen met een drone met vier rotors / propellers, of gewoon met een quadcopterRTF - klaar om vliegen )... Dit betekent dat de gebruiker zich na het uitpakken niet bezig hoeft te houden met het monteren / achteraf inbouwen van het model. Aangezet en gevlogen.
Duur of goedkoop?
Het is beter om te beginnen met quadrics tot $ 50. Ten eerste zijn dergelijke drones ontworpen als lichtgewicht en klein van formaat, wat betekent dat ze geen aanzienlijke schade aan mensen of eigendommen kunnen toebrengen. Ten tweede zal het verliezen van een drone van $ 500 door een gebrek aan pilootvaardigheden veel onaangenamer zijn dan een drone van $ 50. Bovendien, zoals de praktijk laat zien, kan een beginner niet profiteren van het volledige potentieel van een drone van $ 500. Onthoud dat je in deze hobby eenvoudig moet beginnen!

Besturingsapparatuur
In de meeste gevallen heeft het bedieningspaneel van de drone de belangrijkste bedieningselementen: linker en rechter joysticks/joysticks voor het besturen van de drone en een aantal extra knoppen en AUX-schakelaars (2/3-weg), die vaak worden gebruikt om te schakelen tussen vliegmodi, LED's aan en uit te zetten, enz.
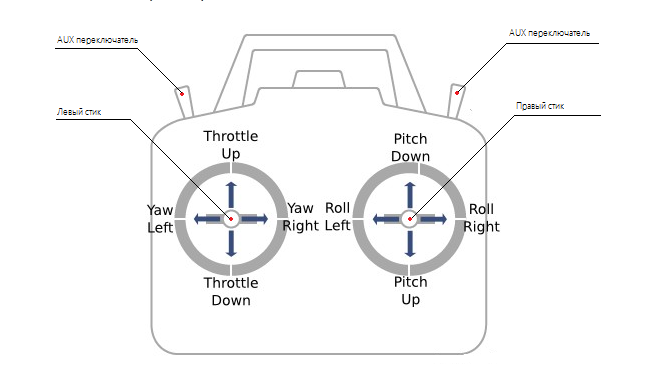
* Schema van klassieke apparatuur.
Hoe bestuur je een quadcopter?
Doel van de linker- en rechter joystick:
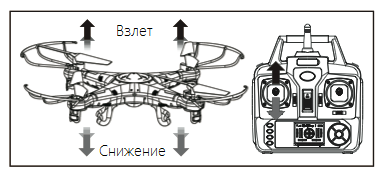
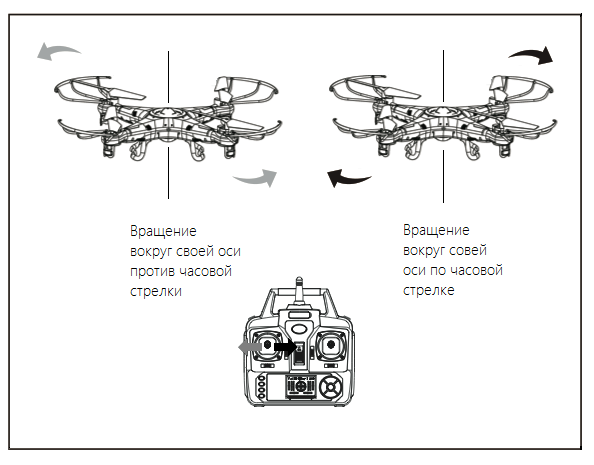
Linker joystick - verantwoordelijk voor het opstijgen en dalen van de drone, evenals voor rotatie rond zijn as.
- Throttle Up - gas, verhoogt het motortoerental (bij het omhoog bewegen stijgt de drone op).
- Throttle Down - rem, vermindert de snelheid van de motoren (bij het omlaag bewegen neemt de drone af).
- Yaw Left - wanneer het naar links beweegt, roteert het vliegtuig rond zijn as tegen de klok in.
- Yaw Right - wanneer het naar rechts beweegt, draait het vliegtuig met de klok mee.
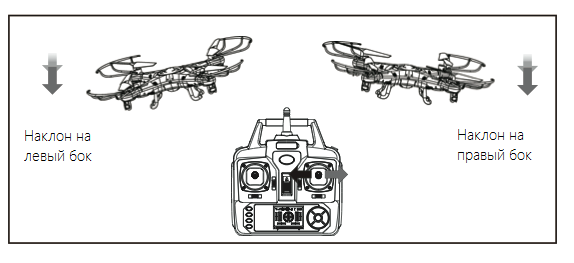
Rechter joystick - verantwoordelijk voor "Pitch" en "Roll" v. e. de drone naar links en rechts kantelen, maar ook naar voren en naar achteren (met de rechter joystick bepaalt de piloot de vliegrichting).
- Naar links rollen - kantelt de drone naar de linkerkant (terwijl de drone naar de linkerkant langs de horizon beweegt).
- Naar rechts rollen - kantelt de drone naar de rechterkant (terwijl de drone naar de rechterkant langs de horizon beweegt).
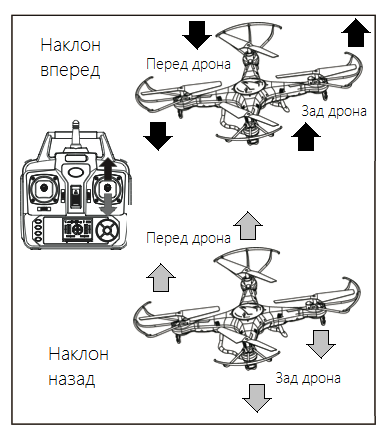
- Pitch Down - wanneer de stick omhoog wordt bewogen, kantelt de drone naar voren (de drone begint naar voren te bewegen).
- Pitch Up - als je de stick naar beneden beweegt, kantelt hij de drone naar achteren (de drone begint achteruit te bewegen).
Drone-vluchtmodi
Er zijn verschillende vluchtmodi, afhankelijk van de vluchtcontroller die in de drone is geïnstalleerd (PC / Flight Controller): KK2 / Multiwii / Naze32 / ArduCopter en anderen). De meest voorkomende modi zijn:
"Acro-modus" (snelheidsmodus / handmatige modus) - in deze modi worden de elektronische assistenten die verantwoordelijk zijn voor het stabiliseren van het vliegtuig uitgeschakeld. De snelheidsindicatoren zullen hun maximale waarden bereiken. Piloten kunnen alleen worden uitgevoerd door gevorderde piloten. Het wordt aanbevolen voor beginners om te beginnen met het leren vliegen in acro-modus met FPV-simulators.
"Zelfniveaumodus" (horizonmodus) - in deze modi is de elektronica die verantwoordelijk is voor het stabiliseren van de drone (gyroscoop, versnellingsmeter) actief, beperkte kosten (snelheidsindicatoren). Modi zijn zeer geschikt voor pilotentraining.
Houdingsmodus - deze vliegmodus wordt bestuurd door de elektronica aan boord die verantwoordelijk is voor het stabiliseren van de drone, de functie voor het vasthouden van de hoogte is actief, geïmplementeerd door middel van een druksensor (barometer). Als de piloot tijdens het vliegen in deze modus de sticks / joysticks loslaat, zal de quad niet vallen, zoals bij het gebruik van de bovenstaande modi, maar zal hij op de hoogte blijven hangen op het moment van de vlucht. De piloot zal de horizontale verplaatsing / drift van de helikopter moeten beheersen, bijvoorbeeld door de aanwezige wind. De modus zal door beginners worden gewaardeerd, maar je moet hem niettemin niet gebruiken bij het lesgeven in piloten, omdat de opgedane ervaring niet compleet zal zijn.
GPS-houdingsmodus - werkt met de directe deelname van de GPS-module. Deze vliegmodus wordt bestuurd door de elektronica aan boord die verantwoordelijk is voor het stabiliseren van de drone. De functie van het vasthouden van een positie, gerealiseerd door middel van GPS, is actief. De drone vergrendelt op een coördinatenpunt en stelt u in staat nauwkeurig te zweven zonder offset / drift, zelfs als deze wordt beïnvloed door externe factoren zoals wind. Hij kreeg de belangrijkste erkenning in luchtfotografie, omdat het de piloot bevrijdt van constante controle over de hoogte die door de drone wordt ingenomen, waardoor hij zich kan concentreren op het verkrijgen van foto- / videomateriaal van hoge kwaliteit.
In de praktijk vind je nog veel meer vliegmodi. Zoals hierboven vermeld, hangt dit af van de flight controller die in de drone is geïnstalleerd. Maar het algoritme van werk in het algemeen zal voor iedereen vergelijkbaar zijn.

Basisvliegregels
Hier hebben we het over welke regels moeten worden gevolgd voor en tijdens de eerste vlucht. Veiligheid staat voorop!
- Kies een goede windstille dag om te vliegen.
- Het vlieggebied moet een groot open gebied zijn zonder gebouwen of hoogspanningsleidingen.
- Zorg ervoor dat er zich geen mensen, dieren, eigendommen op de plaats van lancering en vlucht bevinden.
- Inspecteer het vliegtuig voor de lancering op eventuele gebreken/schade, onjuist/los geïnstalleerde propellers, propellerbeschermers, camera's, enz.
- Probeer alle factoren die u tijdens de vlucht kunnen afleiden tot een minimum te beperken, zoals uw mobiele telefoon in de stille modus zetten, enz.
Eerste vlucht
Nadat de veiligheid is gewaarborgd, kunt u overgaan tot praktijkvluchten. Je moet eenvoudig beginnen en eerst het volgende uitwerken:
- Oefen met opstijgen en zweven in de lucht op een hoogte van maximaal twee meter, gevolgd door landen.
- Neem korte vluchten van punt "A" naar punt "B" en land dan.
- Bereik een zelfverzekerde, stabiele besturing met de eerste twee stappen.

Praktisch advies
Windsnelheid
Windsnelheid is de eerste indicator waar je op moet letten voordat je erin vliegt de buitenlucht. Vlieg niet als de windsnelheid hoger is - 6 m / s. Zelfs met zo'n wind zal de drone tijdens de vlucht niet stabiel zijn en zal hij constant moeten worden aangepast, wat vooral moeilijk is voor een beginner. Bij windsnelheden boven de 11 meter per seconde loopt de piloot het risico de drone te laten crashen.
Oefening met zweven
In de praktijk is "zweven (houdpositie)" veel moeilijker dan het op het eerste gezicht lijkt. Vooral wanneer de vlucht wordt uitgevoerd in de first person view (FPV)
Gashendel
Wat doe je als er plotseling met hoge snelheid een boom in het pad van je drone komt? Iemand zal zeggen: "Ik kleed hem gewoon aan en dat is het." Maar in de praktijk is er soms geen tijd om rond te vliegen, en een verstandige beslissing in zo'n situatie zou zijn om het gas gewoon op nul te zetten. Zo kunt u de kans op maximale schade aan zowel de drone / het frame zelf als de afzonderlijke elementen, zoals motoren, antennes, enz. aanzienlijk verminderen. Het is ook de moeite waard eraan te herinneren dat u het gebruik van rotorbeschermers, die vaak in de kit zitten, niet mag verwaarlozen, vooral tijdens de training om te vliegen, zelfs als ze de vliegeigenschappen van de helikopter aanzienlijk verminderen.
FPV-simulators
Met FPV-simulators kunt u de kosten die gepaard gaan met de vernietiging van de drone als gevolg van crashes minimaliseren, wat vooral belangrijk is in de beginfase van de vliegopleiding. Het is met FPV-simulators dat het wordt aanbevolen om kennis te maken met drone-besturing voor beginners. We raden ons aparte materiaal aan dat het onderwerp van moderne FPV-simulators maximaal onthult

Conclusie
Helaas zijn botsingen en vallen (crashes) in onze hobby onvermijdelijk voor zowel beginners als professionals. En het beste wat u kunt doen, is leren deze gebeurtenissen te minimaliseren. Onthoud dat alles voortkomt uit de ervaring die je alleen tijdens het oefenen krijgt. Hoe meer vlieguren, hoe meer mogelijkheden er voor je zijn om de drone te besturen.
Hopelijk hebben we in deze korte handleiding voor beginners het meest volledige begrip kunnen overbrengen van waar we op moeten letten bij het leren vliegen met een drone in de beginfase. Het is natuurlijk niet mogelijk om de hele opleiding in één artikel te passen, maar als dit niet genoeg voor je is, raden we je aan om speciale cursussen te volgen over het geven van UAV-piloten in gespecialiseerde onderwijsinstellingen bij jou in de buurt, aangezien er al zo een.
Video
Een illustratief voorbeeld van het besturen van een drone.
.






