
- 1 מבוא
- 2 תכונות
- 3 מפרט
- 3.1 מזל"ט
- 3.2 פונקציות מיפוי
- 3.3 GNSS
- 3.4 מיקום חזותי
- 3.5 מערכת אינפרא אדום
- 3.6 מצלמה
- 3.7 גימבל
- 3.8 סוללה
- 3.9 תחנת טעינה חכמה
- 3.10 לוח בקרה
- 4 מראה
- 5 מערכת הדמיה רב -ספקטרלית
- 6 חיישן מעקב אחר ספקטרלים
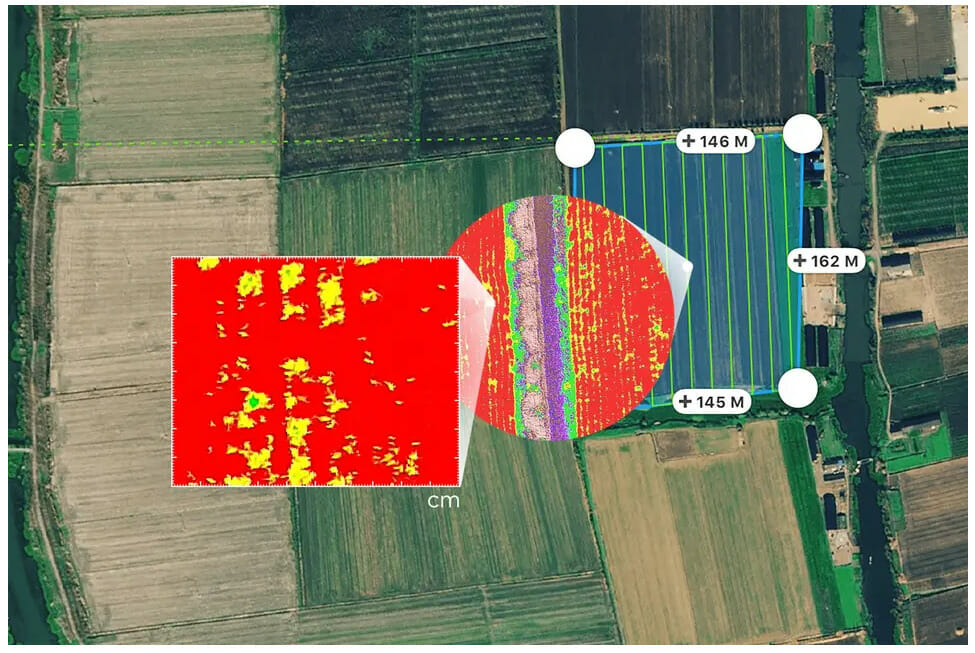
- 7 שידורי RGB ו- NDVI
- ) דיוק של 8 סנטימטרים
- 9 תואם ל- D-RTK 2 ו- NTRIP
- 10 OcuSync 2.0
- 11 משימות חקלאיות חכמות
- 11.1 תכנית טיסה
- 11.2 לכידת נתונים
- 11.3 ניתוח נתונים
- 11.4 פעולות המבוססות על ממצאים
- 12 יישום
- 12.1 חקלאות מדויקת
- 12.2 ניטור ובדיקה סביבתית
- 13 שאלות נפוצות
- 13.1 מזל"ט
- 13.2 מצלמות
- 13.3 ציוד בקרה
- 13.4 שידור אותות
- 13.5 ספק כוח
- 13.6 תוכנה
- 13.7 אפליקציה
מבוא
כחלק מהאירוע השנתי DJI Airworks 2019פאנטום 4 פלטפורמת RTK, ליישום חקלאות מדויקת וניהול קרקעות. ה- Phantom 4 Multispectral - הוא דגם מזל"ט בעל דיוק גבוה המצויד במערכת עיבוד תמונה רב -ספקטראלית המאפשרת לחקלאים ואגרונומים להשיג במהירות את הנתונים המדויקים ביותר על מצב האדמה והיבול שלהם, מה שמביא את התעשייה לרמה אינטליגנטית חדשה של אינטראקציה עם הסביבה.
בנוסף למזל"ט הרב -ספקטרלי P4, פתרונות המטען " גלאי דליפת מתיין מבוססי U10 מבוססי מל"טWingsland Z15
- DJI Agras T16
- התוכנית לסיוע באסונות DJI היא יוזמה חדשה, תוכנית להקלה על אסונות שמטרתה להצטייד במהירות במגישי חירום באמצעות טכנולוגיית DJ.
תכונות
- מודול RTK
- דיוק מיקום סנטימטר
- הדמיה רב -ספקטרלית מערכת
- מערכת תיקון TimeSync
- חיישן מעקב אחר ספקטרלי השמש
- שידור בזמן אמת NDVI
- מערכת חישה מכשולים 6 כיוונים
- טסה אוטומטית -מצבים
- יישום תכנון טיסה GS PRO
- מערכת שידור וידאו של OcuSync 2.0
- תואמת לחלוטין לתחנת סלולר D-RTK 2
- תמיכה בעיבוד לאחר נתוני PPK
- מקסימום. מרחק הסרה 10 ק"מ
- מקס. זמן טיסה 27 דקות

מפרט
מזל"ט
18 קמ"ש (שליטה ידנית)
GNSS

דיוק סנטימטר
מערכת TimeSync של DJI מאפשרת למפעיל לקבל נתוני מיקום בזמן אמת עבור כל תמונה שצולמה על ידי כל שש מצלמות, ובכך להבטיח את דיוק המדידות ברמת סנטימטר. המערכת מיישרת כל הזמן את בקר הטיסה, מצלמות RGB ו- NB ואת מודול RTK, לוכדת את נתוני המיקום במרכז ה- CMOS, ומבטיחה שכל תמונה משתמשת במטא נתונים המדויקים ביותר. כל המצלמות עוברות תהליך כיול קפדני המודד עיוות עדשות רדיאלי ומגעי. פרמטרי העיוות שנאספו נשמרים במטא נתונים של כל תמונה, ומאפשרים להתאים את התוכנה שלאחר העיבוד לכל משתמש בנפרד.
תואמי D-RTK 2 ו- NTRIP
תחנת נייד דיוק גבוהה GNSS D-RTK 2 ו- NTRIP (שידור רשת של תיקוני RTCM באמצעות פרוטוקול האינטרנט), או שתוכל לשמור את נתוני תצפית הלוויין לשימוש מאוחר יותר בקינמטיקה לאחר עיבוד (PPK).

OcuSync 2.0
טכנולוגיית שידור הוידאו הדיגיטלית המובילה OcuSync, המאפשרת לעבור בין תדרים של 2.4 GHz ו -5.8 GHz המבוססים על הערוץ עומס, המספק חסינות רעש מעריכי ביציאה וזמן עיכוב במרחק FPV של עד 10 ק"מ (עבור P4 Multispectral).
משימות חקלאיות חכמות
תוכנית טיסה
המפעיל יכול לבצע משימות אוטומטיות ובקרת טיסה באמצעות אפליקציית DJI המתקדמת - GS PRO, הפועלת במכשירי IOS.
![]()
לכידת נתונים
P4 Multispectral מאפשר למשתמש לאסוף ביעילות תמונות מולטי -ספקטרליות על שטח גדול ולקבל סקירה אובייקטיבית של הבעיה שטחים.

ניתוח נתונים
גישה קלה ותפעול של תמונות אוויר באמצעות מדדים ופרמטרים ספציפיים לצמחים להשגת תוצאות בריאות הצמח.
פעולות המבוססות על הנתונים שהתקבלו
בהתבסס על הנתונים שהתקבלו מהמל"ט, המשתמש יכול לקבל את ההחלטות הדרושות מכוונות בשיפור המצב עם / x אדמות וגידולים.

יישומים
חקלאות מדויקת
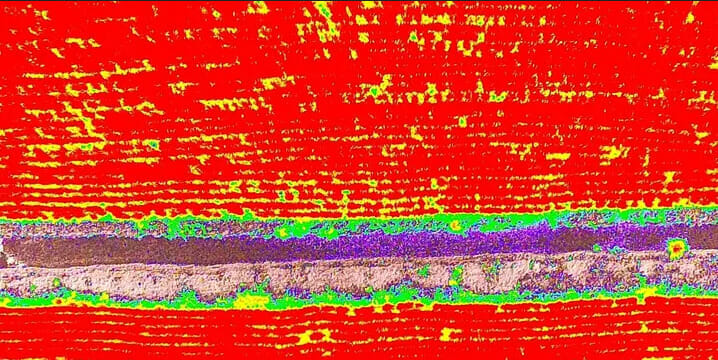
תמונות מולטי -ספקטרליות יכולות להיות שימושיות בכל הגידול העונה, מתן מידע באמצעות הספקטרום האלקטרומגנטי הבלתי נראה לעין האנושית. עם גישה לנתונים אלה ולנתוני מדדי הצמחייה כגון NDRE ו- NDVI, החקלאים יכולים לקבל החלטות מושכלות על טיפול ביבול בזמן, להפחית עלויות, לחסוך במשאבים ולמקסם את התשואות.

ניטור ובדיקה סביבתית
ניתן לבצע חקר ויעיל סדיר אחר הצמחים בעזרת המזל"ט הרב -ספקטרלי P4. ניתן להשתמש בנתונים הרב -ספקטרליים המתקבלים כדי לפקח על בריאות היער, למדוד ביומסה, למפות קווי חוף או לנהל צמחיית חוף תוך הגנה על בתי גידול או מערכות אקולוגיות ועוד.

שאלות נפוצות
מזל"ט
ש 'כיצד פועל P4 מולטי -ספקטרלי נבדלים מ- Phantom 4 RTK?
א. שניהם - פלטפורמות מזל"ט תואמות RTK. ההבדל העיקרי הוא המצלמה. ה- P4 Multispectral מגיע עם מצלמה המורכבת מ- RGB אחד וחמש מצלמות multispectral מבוססות מערך, כל אחת ברזולוציה של 2MP; בעוד שה- Phantom 4 RTK מגיע עם מצלמה אחת של 20MP RGB.
ש: באילו מדחפים משתמש ה- P4 Multispectral?
א. הוא משתמש במדחפים 9455S בעלי רעש נמוך. אביזרי מזל"ט מסדרת פנטום 4 מתאימים גם הם, אך הם יפגעו במאפייני הטיסה של ה- P4M.
ש. מה יש לעשות על מנת להבטיח את בטיחות חיישן אור השמש הספקטראלי?
א. הרחק אותו מאובייקטים קשים וחדים כדי להימנע מגירוד.

מצלמות
ש: מהן היכולות של מערך המצלמות הרב -ספקטראלי P4?
מערכת ההדמיה הרב -ספקטרלית P4 מזהה את הפליחות של אובייקטים שונים, הנרשמת על ידי כל אחת מהמצלמות ומנותחת לחישוב ערכי מדד הצמחייה. מדד נפוץ המשמש בחקלאות וביערות לבריאות הצמחים הוא ה- NDVI. בינתיים, חיישן אור שמש ספקטראלי הממוקם בחלק העליון של המזל"ט מפצה על אור השמש המתקבל בשעות שונות ביום, ומשפר את עקביות הנתונים מאותו אזור של צמחייה.
V.כיצד מיושמת כיול מצלמה רדיומטרית?
א. התמונות שלך מכוילות רדיומטרית כאשר אתה מעבד אותן עם תכונות אינדקס הצמחייה ב- DJI GS Pro וב- DJI Terra.
ש. האם המצלמות ב- P4 Multispectral קיבלו פיצוי על מיקום התמונה?
א. כן. המיקומים של מרכזי ה- CMOS של שש המצלמות ביחס למרכז הפאזה של אנטנת ה- D-RTK המשולבת כוילו ונרשמו בנתוני EXIF לכל תמונה.
ש. האם עדשות המצלמה עברו תיקון עיוות?
א. התמונות המקוריות אינן מתוקנות לעיוות, אך כל עדשת מצלמה נמדדה לעיוות במהלך תהליך הייצור, וכל פרמטרי התיקון נרשמים בכל אחת מהתמונות.
ש. האם המצלמות תוקנו לצורך צביטה?
א. וינטינג אינו מתוקן על תמונות מקוריות, אך הגדרות לתיקון נרשמות בכל תמונה.
ש: כיצד מובטחת עקביות בין מערכי מצלמות רב -ספקטרליות וחיישני שמש ספקטרליים במזל"טים שונים?
א. כל רחפני P4M עוברים כיול מצלמה וחיישן סטנדרטיים לסטנדרטים של תעשיית DJI, וממזערים את ההבדלים בין המל"טים.
ש: מה מאוחסן בערכי פיקסלי תמונה, ערכי DN או ערכי השתקפות?
O. DN ערכים.

ציוד בקרה
ש. איזה שלט רחוק תואם את ה- P4 Multispectral?
א. נכון לעכשיו, ה- P4 Multispectral תואם רק לחומרת הבקרה SDK שמגיעה עם המזל"ט.
שידור אותות
ש. מה הרזולוציה של זרם הווידיאו הרב -ספקטרלי P4? O. 720p.
הספק
ש. האם אוכל להשתמש בסוללה מולטי -ספקטרלית P4 ב- Phantom 4 RTK?
א. כן.
ש: כמה זמן לוקח לטעון את הסוללה המולטי -ספקטרלית P4?
א. כ -58 דקות.

ת"ו
ש. האם יש הגבלה על מספר נקודות הציון לכל יציאה?
א. מספר נקודות הציון בכל משימת טיסה אינו מוגבל, אך המזל"ט יכול לבצע פעולות עד 99 נקודות ציון בלבד. כאשר למשימת טיסה יש יותר מ- 99 נקודות ציון, ה- DJI GS Pro מחלק אוטומטית נקודות ציון לקבוצות, כל אחת עם 99 נקודות ציון לכל היותר.
ש: מהן גובה הטיסה ומהירות ההגבלה?
O. מקס. גובה טיסה: 500 מ ', מינימום: 1 מ'. מקסימום. מהירות טיסה: 54 קמ"ש, מינימום: 3.6 קמ"ש.
ש: באיזה מצב טיסה עלי להשתמש אם ברצוני לעבור בין RGB בשידור חי ל- NDVI?
א. ניתן לעבור בין RGB live ל- NDVI במצב ידני.אנו ממליצים להישאר במצב RGB ולא לעבור בין הערוצים במהלך הטיסה. תמונות JPEG יישמרו אוטומטית ב- RGB או NDVI בהתאם למצב המצלמה. רוב תוכנות המיפוי של צד שלישי דורשות תמונות RGB לצורך טריאנגולציה אווירית לפני כיסוי מפות NDVI.
ש: מהן הגדרות המצלמה המומלצות?
א. עבור משתמשים מתחילים, המפתח ממליץ להגדיר את מצב המולטי -ספקטראלי לאוטומטי, בחר "מדידה ממוצעת" כמצב מדידה ובחר ביטול נעילה של AE.
ש. האם תוכנת P4M תומכת במפתחי מעריצים?
א. תמיכה ב- DJI Mobile SDK תהיה זמינה בקרוב.
ש: אילו מדדי צמחייה נתמכים ב- DJI Terra?
A. DJI Terra תומך ב- NDVI, GNDVI, NDRE, LCI ו- OSAVI, אך אין לו תכונת מחשבון אינדקס צמחיה.

יישום
ש. האם אוכל לשחזר מפות באמצעות תוכנת צד שלישי? O.כן.
ש. כיצד אוכל לחשב גובה טיסה מתאים בהתבסס על ערך גודל פיקסל הקרקע (GSD)?
O. ה- GSD עבור ה- P4 Multispectral הוא (H / 18.9) ס"מ / פיקסל. אתה יכול לחשב את גובה הטיסה בדיוק שאתה צריך.
ש: מהו שטח המיפוי המרבי לטיסה אחת?
א. בטיסה אחת, בגובה של 180 מ ', ל- P4 Multispectral שטח תצוגה מרבי של כ -0.47 קמ"ר, כלומר. ה- GSD הוא כ -9.52 ס"מ / פיקסל.
ש: האם כל מידע גובה משתקף בנקודות הציון של המשימה?
א. מידע הגובה (ביחס לנקודת ההמראה שלך) מאוחסן בתצלומים שצולמו בנקודות ציון.
ש. האם ה- P4 Multispectral תואם לתחנות בסיס של צד שלישי?
א. לא, לא ניתן לחבר תחנות בסיס של צד שלישי למולטי -ספקטרום P4 או לשלט רחוק באמצעות רדיו. עם זאת, תוכל לקבל נתונים משרת RTK ברשת באמצעות פרוטוקול NTRIP בסביבת רשת 4G / Wi-Fi. המשתמש יכול לשמור את נתוני תצפית הלוויין במזל"ט לצורך עיבוד לאחר השימוש בשיטה הקינמטית (PPK).
.






