
- 1 מבוא
- 2 תכונות
- 3 תכולת החבילה
- 4 מפרט
- 4.1 מזל"ט
- 4.2 פונקציות מיפוי
- 4.3 מיקום חזותי
- 4.4 מצלמה
- 4.5 סוללה
- 4.6 תחנת טעינה חכמה
- 4.7 GNSS
- 4.8 השעיה
- 4.9 מערכת אינפרא אדום
- 4.10 לוח בקרה
- 5 מראה
- 6 מצלמה
- 7 מערכת מיצוב
- 8 TimeSync
- 9 OcuSync 2.0
- 10 אפליקציית GS RTK
- 11 D-RTK Mobile Station 2
- 12 תמיכה ב- SDK לנייד
- 13 פאנטום 4 RTK בפועל
- 14 מחיר
- 15 שאלות נפוצות
- 15.1 מזל"ט
- 15.2 מצלמה
- 15.3 שלט רחוק
- ) 15.4 זרם וידאו
- 15.5 סוללה
- 15.6 מיקום
- 15.7 תוכנה
- 15.8 מיפוי
- 16 סרטונים
מבוא
ב- 15 באוקטובר, המובילה העולמית ברכבים אוויריים ובלתי מאוישים וטכנולוגיות צילום אוויר - DJI Innovationsעל הגרסה המסחריתפאנטום. ה- Phantom 4 RTK היא מערכת הדמיה חזקה ומדויקת ביותר שנועדה לענות על הצרכים הספציפיים של משתמשים תעשייתיים בתחומים כגון מיפוי ובדיקה.
תכונות
- מודול RTK חדש
- דיוק מיקום סנטימטר עם כמה פחות נקודות בקרה
- דיוק מיקום במישור האופקי: 1cm 1md
- דיוק המיקום במישור האנכי: 1.5cm 1md
- דיוק מוחלט של המודל הפוטוגרמטרי במישור האופקי: 5cm*
- מערכת תיקון TimeSync חדשה
- יישום תכנון טיסה חדש GS RTK
- 2 מצבי גלישה
- מערכת עיבוד תמונה מדויקת הבנויה על חיישן CMOS 20MP בגודל 1 אינץ 'עם מכני תריס
- תמיכה בנייד SDK
- מערכת שידור OcuSync 2.0
- תואמת לחלוטין לתחנת הנייד D-RTK 2
- מותאם לעבודה במטרופולינים
*כאשר טסים במזג אוויר שטוף גובה של 100 מ ', גודל הפיקסל על הקרקע (GSD) 2.74 ס"מ.

תכולת החבילה
תכולת החבילה של ה- Phantom 4 RTK תלויה לחלוטין במשימות שהציב הלקוח (משתמש)). להזמנת מזל"ט, מומלץ ליצור קשר עם סוחר ה- DJI הרשמי הקרוב אליכם, או לשלוח את פרטי ההתקשרות שלכם לצוות ה- DJI באמצעות האתר הרשמי כדי שיוכלו ליצור עמכם קשר.
ערכה בסיסית תכלול:
- Phantom 4 RTK
- בקר עם מסך מובנה בגודל 5.5 אינץ ',
- 2 × סוללות חכמות ל- P4 RTK,
- 1 × סוללה חכמה ללוח הבקרה,
- מטען לטעינה בו זמנית של שתי הסוללות,
- חיבור מתאם מתח מטען כבל,
- 8 × רוטורים (4CW / 4CCW)
- נעילת גימבל מצלמה
- 16GB MicroSD
- מארז משלוח
- מיקרו USB כבל
- כבל USB-C
- כבל USB-C OTG.

מפרט
מזל"ט
פונקציות מיפוי

מיקום חזותי
מצלמה
סוללה
)תחנת טעינה חכמה

GNSS
מראה
) 



מצלמה
בבסיסו, חיישן CMOS בגודל 1 אינץ 'בגודל 20 מגה-פיקסל פועל במקביל לתריס מכני המבטל עיוות תמונות בעת צילום בתנועה, ובכך מאפשר מיפוי משימות או איסוף נתונים רגיל. הודות לרזולוציה הגבוהה שלו, ה- Phantom 4 RTK יכול להגיע ל- GSD של 2.74 ס"מ מגובה של 100 מטר. על מנת להבטיח דיוק חסר תקדים זה, כל עדשה עוברת תהליך כיול קפדני המודד את עיוות העדשה הרדיאלי והמשיק. פרמטרי העיוות שנאספו נשמרים במטא נתונים של כל תמונה, ומאפשרים להתאים את התוכנה שלאחר העיבוד בנפרד לכל משתמש.

באזורים ללא כיסוי RTK, ה- Phantom 4 RTK יאפשר קינמטיקה של Post Processing Kinematic (PPK). המזל"ט לוכד את נתוני תצפית הלוויין המקורית כמו גם נתוני אפמריז ושומר אותם בקובץ PPKRAW.bin בפורמט RTCM 3.2. בנוסף, ה- P4 RTK ממיר נתוני לוויין תוך כדי טיסה ל- RINEX (Receiver Independent Exchange Format) וכותב אותם לקובץ RINEX.obs.
על ידי סנכרון פנימי של מיקום ה- GNSS והמצלמה, קובץ Timestamp. MRK מספק תיעוד מדויק של המיקום המדויק ביותר של התמונה. כל הנתונים הקשורים לפעולות נשמרים בכרטיס ה- microSD בתיקייה ייחודית לכל משימה. עקביות נתוני Phantom 4 RTK מקטינה את זמן האימות ומאפשרת זרימת עבודה יעילה לאחר עיבוד עם התאמות ידניות מינימליות.
מערכת מיקום

דיוק מיקום הסנטימטר בזמן אמת של הנתונים שהתקבלו.
ללא מודול RTK, רכב אווירי בלתי מאויש דורש עד 40 נקודות בקרה קרקעיות (GCP) לקילומטר מרובע, מה שדורש זמן רב בפועל. ל- DJI Phantom 4 RTK מערכת ניווט הממוקמת במיקום דיוק של סנטימטר RTK הפועלת יחד עם מערכת הדמיה בעלת ביצועים גבוהים.טנדם מפחית פוטנציאל את מספר נקודות השבירה הנדרשות עבור '0', וחוסך לפחות 75% מזמן ההתקנה.

ממש מתחת למקלט RTK נמצא מודול גיבוי GNSS לטיסה יציבה באזורי אותות נמוכים כמו ערים גדולות. טנדם מודולרי Phantom 4 RTK אופטימיזציה של בטיחות הטיסה והנתונים המדויקים ביותר עבור מדידות עבודה, מדידות ומיפוי מורכבות.] * כאשר טסים במזג אוויר שטוף שמש בגובה של 100 מ ', גודל הפיקסל הקרקע (GSD) 2.74 ס"מ).
TimeSync
![]()
מערכת חדשה לאיסוף נתונים מדויקים - TimeSync. מספק יישור רציף של בקר הטיסה, המצלמה ומודול ה- RTK. בנוסף, TimeSync מבטיח שכל תמונה משתמשת במטא נתונים המדויקים ביותר ולוכדת אותם במרכז ה- CMOS, אשר בתורו מייעל את התוצאות באמצעות טכניקות פוטוגרמטריות, ומאפשר לתמונה להתאים נתוני מיקום ברמת סנטימטר.
OcuSync 2.0

מערכת שידור הווידיאו OcuSync 2.0 מספקת חיבור יציב, נגד חסימה בין ציוד הבקרה והמזלט. עד 10 ק"מ משם עם איכות קישור וידאו 720p, אידיאלי למיפוי שטח גדול. מרווח זמן הטיסה של עד 30 דקות יאפשר לטייסים לבצע משימות ארוכות יותר ללא צורך לנחות כדי להחליף את הסוללה.
גם אם סוללה אחת לא מספיקה לכסות את כל שטח העבודה, לאחר שינוי ההספק, "חידוש הפעולה" יחזור אוטומטית ליישום GS RTK.
אפליקציית GS RTK
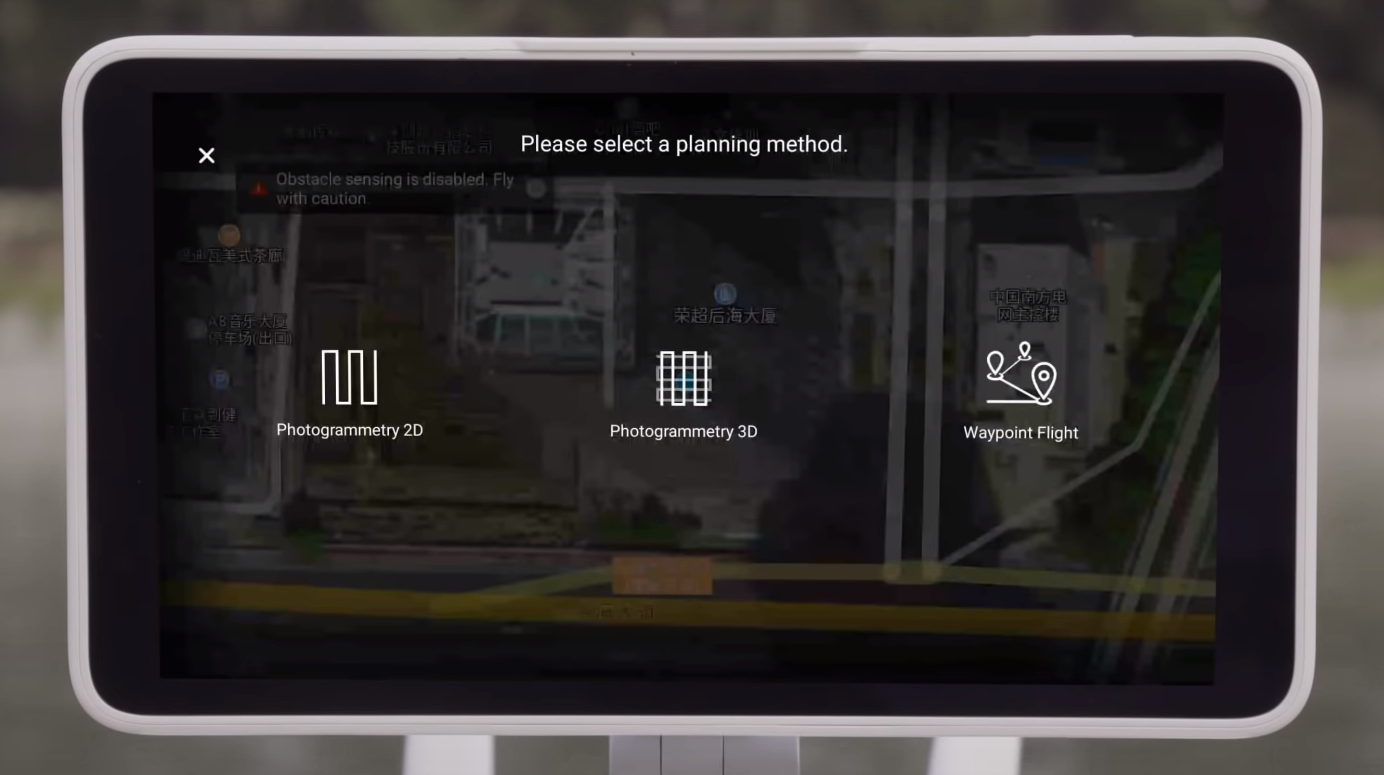
אפליקציית GS RTK החדשה יחד עם מצבי טיסה מסורתיים תאפשר לטייסים לשלוט טוב יותר במזל"ט הודות לשני מצבי תכנון - פוטוגרמטריה וטיסת Waypoint. מצבי תכנון מאפשרים למשתמש לבחור את נתיב הטיסה של המזל"ט, תוך התאמה בו זמנית של יחס החפיפה, הגובה, המהירות, פרמטרי המצלמה וכו ', מתן תהליך מיפוי אוטומטי או שליטה על זרימת העבודה ביציאה. ניתן לחזור בקלות על יציאות מתוכננות, מה שמאפשר לאסוף את אותם נתונים לאורך פרקי זמן שונים כדי לעקוב אחר שינויים באזור המבוקר.

לתכנון טיסה במשרד, אפליקציית GS RTK מורידה ישירות קבצי KML ו- KMZ. מצב עדיפות התריס החדש מבטיח חשיפה יציבה גם בעת טיסה אוטונומית בתנאי רוח חזקים.
D-RTK Mobile Station 2

Phantom 4 RTK תואם באופן מלא ל- D-RTK Mobile תחנה 2, אחראית לספק למזל"ט נתונים דיפרנציאליים בזמן אמת וליצור פתרון גיאודטי מדויק. העיצוב החזק של D-RTK 2,מידת ההגנהIP67,יחד עם מערכת שידור הווידיאו OcuSync 2.0, מבטיח למשתמשים לקבל נתונים מדויקים בסנטימטר גם בתנאים קשים.
Phantom 4 RTK קל להשתלב בכל זרימת עבודה על ידי חיבור מערכת המיקום לתחנת הנייד D-RTK 2 באמצעות דונגל 4G או נקודת Wi-Fi באמצעות פרוטוקול NTRIP (דיפרנציאל) הזרמת GPS דרך האינטרנט), או שתוכל לשמור את כל הנתונים שהתקבלו להמשך עיבוד בשיטת קינמטיקה בעיבוד לאחר (PPK - Post Processing Kinematic).
תמיכה ב- SDK לנייד
ה- Phantom 4 RTK תואם ל- DJI Mobile SDK, ומעניק למשתמש גישה ישירה לפונקציות מזל"ט לאוטומציה ו התאמה אישית באמצעות מכשיר נייד.
Phantom 4 RTK בפועל

DJI עובדת בשיתוף פעולה הדוק עם ענקית הבנייה האירופית Strabag SE, שחקנית מרכזית בתשתיות תחבורה. באמצעות טכנולוגיות בלתי מאוישות במספר פרויקטי מיפוי מאז 2010 כדי להפחית עלויות ולהגדיל את תפוקת העבודה, הצליחה החברה להעריך את היתרונות של שימוש בתצלומי אוויר בדוגמנות תלת מימד. הכלי העדכני ביותר למשימות כאלה עבור ה- Strabag SE הוא DJI Phantom 4 RTK.
"ישנם יתרונות רבים לשימוש במזל"טים למטרות מיפוי. האינטגרציה שלהם שינתה את זרימת העבודה שלנו ופישטה את השלבים התפעוליים ", אמר תומאס גרונינגר, ראש תחום הערכה דיגיטלית של נכסים ומל"טים ב- Strabag SE. "שיטות סקר קונבנציונאליות מספקות גם מודלים תלת -ממדיים, אך דגמי שטח דיגיטליים הנוצרים מנתוני מל"טים מספקים צפיפות נקודה גבוהה ולכן יותר פרטים".] האתר הרשמי כדי שיוכלו ליצור איתך קשר.
- Phantom 4 RTK - 5700 €
- Mobile Station D -RTK 2 - 3600 €
- Phantom 4 RTK Mobile Station D -RTK 2 - 7800 €
שאלות נפוצות
מזל"ט
ש: מה גורם לפאנטום 4 RTK שונים מדגמי Phantom קודמים? ת: כל סדרות הפאנטום הקודמות נועדו לצלמים מקצועיים ולחובבי רחפנים, ה- Phantom 4 RTK מיועד למשתמשים תעשייתיים בתחומים כגון מיפוי ובדיקה מדויקים.ה- P4 RTK יורש מצלמה, צורה וגודל דומה, כמו גם תוספת של מודול מיקום RTK, מערכת TimeSync חדשה, יישום מיפוי והרבה יותר.
ש: אילו מדחפים יש ל- Phantom 4 RTK? ת: ה- P4 RTK מצויד באביזרים הסטנדרטיים של 9450 שמגיעים עם Phantom 4 Pro.
ש: האם אוכל להריץ את ה- Phantom 4 RTK במדינות ואזורים אחרים? ת: לא, ל- P4 RTK יש גרסאות ספציפיות למדינות ו / או אזורים שונים. משתמשים יכולים לבדוק את קוד הגירסה על ידי מציאתו על אריזת המוצר או באמצעות אפליקציית GS RTK (בחלק מידע על מזל"ט של הקושחה).
מצלמה
ש: מה ההבדל בין מצלמות Phantom 4 RTK ו- Phantom 4 Pro / Advanced? ת: למרות שכל השלושה בנויים על אותו חיישן CMOS בגודל 1 אינץ 'בגודל 20 מגה-פיקסל, מצלמת ה- P4 RTK שופרה באמצעות תהליך הקלטה חדש של עיוותי עדשות. כל מצלמת P4 RTK עוברת הליך כיול, שבמהלכו נמדדת עיוות העדשה ונרשמים הפרמטרים המקבילים של OPEN-CV. המצלמה מאפשרת לך להוציא את התמונות המקוריות מבלי לתקן עיוות, וניתן להשתמש בפרמטרים של עיוות OPEN-CV שנרשמו בקובץ XMP לאחר העיבוד.
ש: האם ניתן להשתמש במסנני Phantom 4 Pro ND ב- Phantom 4 RTK? ת: כן אולי ניתן להשתמש במסנני ND המיוצרים עבור P4Pro גם ב- P4 RTK.
ש: האם מעבד האותות הדיגיטליים של המטוס תומך בתיקון עיוות המצלמה? ת: לא, המשתמש יכול לאפשר תיקון עיוות בתוך המצלמה, אך אז נאמנות התמונה תהיה נחותה מתיקון העיוות בתוכנות שלאחר העיבוד.
שלט רחוק
ש: מה ההבדל בין שלט רחוק Phantom 4 RTK לבין Phantom 4 Pro שלט רחוק? ת: לוח הבקרה P4 RTK קיבל מספר שינויים כדי לענות על צרכי המשתמשים התעשייתיים, כולל: חריץ microSD, רמקול מובנה, סוללות הניתנות להחלפה חמה. בנוסף, משתמשים יכולים לחבר ציוד בקרה לאינטרנט להפעלת רשת RTK עם מפתח 4G. לבסוף, יישום GS RTK חדש שתוכנן במיוחד כבר מותקן מראש בכל מכשיר, ומאפשר למפעיל להתחיל משימות איסוף נתונים מיד לאחר הפירוק.
ש: האם ניתן לשלוט ב- P4 RTK באמצעות ציוד הבקרה Phantom 4 Pro? ת: לא.
ש: האם ניתן לעבור בין מצבי FCC ו- CE? О: מעבר בין מצבים אינו זמין.
זרם וידאו
ש: מהו מרחק ה- FPV מה- Phantom 4 RTK? ת: מרחק הקיזוז האפקטיבי של FPV תלוי בשיטות ההפעלה של המשתמש (למשל מיקום האנטנה) ובסביבה בפועל באזור המאויש. בסביבה פתוחה ולא סגורה, מרחק ה- FPV המרבי הוא 10 ק"מ (עבור FCC 5.8GHz) ו -6 ק"מ (עבור CE 2.4GHz).
ש: האם אפשר להמשיך במשימת המיפוי שהתחילה אם במהלך הביצוע שלה ה- P4 RTK יאבד את אות שידור הווידאו? ת: כן, אם אות שידור הווידאו אבד, המשתמש יכול להפעיל מחדש את הציוד ולהמשיך במשימה.
סוללה
ש: האם ניתן להשתמש בסוללות P4 Pro ב- Phantom 4 RTK? ת: כן, סוללות מזל"ט ניתנות להחלפה לחלוטין.
ש: כמה זמן לוקח לטעינה מלאה של סוללת P4 RTK? ת: הטעינה המלאה לוקחת לא יותר מ- 60 דקות.
ש: כיצד יש צורך לתחזק את הסוללה ולאחסן אותה? ת: לאחסן במקום יבש. לפני אחסון לטווח ארוך, וודא שהסוללה טעונה ב -50% ומעלה ונפרקת כל שלושה חודשים כדי לשמור על הביצועים.
ש: האם ניתן להשתמש בסוללת המזל"ט בסביבות בטמפרטורה נמוכה? ת: ביצועי הסוללה יורדים באופן דרמטי בטמפרטורות
ש: באילו יישומים יש פונקציות מיפוי ובדיקה? ת: ניתן להשתמש ביישום GS RTK המותקן מראש למיפוי ובדיקה. בנוסף, משתמשים יכולים להתקין יישומים שנוצרו ב- DJI Mobile SDK.
ש: האם התנהגות החזרה הביתה (RTH) של Phantom 4 RTK שונה מה- Phantom 4 Pro? ת: לא, מצב RTH P4 RTK כמעט זהה.
ש: האם יש הגבלות על הגדרת נקודות ציון עבור P4 RTK? ת: כן, המרחק בין הנקודות אינו יכול לעלות על 2 ק"מ, מספר הנקודות הכולל אינו יכול לעלות על 99 ואורך תכנית הטיסה לא יעלה על 15 ק"מ.
ש: האם מותר להזין ערכי אורך וקו רוחב לקביעת נקודות ציון? ת: לא.
ש: מהו מספר נקודות הגבול המרבי ש- GS RTK יכול לתמוך באמצעות קבצי KML מיובאים? ת: כרגע האפליקציה תומכת בעד 99 נקודות גבול.
מיפוי
ש: באילו פורמטים של נתונים דיפרנציאליים תומך Phantom 4 RTK? A: P4 RTK תומך כיום: RTCM 3.0, RTCM 3.1, MSM4 ו- MSM5 בפורמט RTCM3.2.
ש: האם הקואורדינטות נמדדות על ידי ה- Phantom 4 RTK מוחלטות במערכת הקואורדינטות שנבחרה על ידי המשתמש? ת: כן, בהחלט.
ש: כיצד לחשב את גובה הטיסה הנדרש על בסיס ערך ה- GSD? ת: להערכת הגובה המתאים, עיין במשוואה: H = 36 * GSD. כדאי לשים לב לכך שגודל הפיקסל על הקרקע (GSD) נמדד בסנטימטרים, והערך "H" (גובה או גובה טיסה) נמדד במטרים.
ש: האם התמונות שצולמו על ידי ה- RTK P4 שומרות נתוני גובה? אם כן, כיצד מאוחסנים הנתונים הללו? ת: כן, הם כן. גובה מעל פני הים וגובה יחסית (ביחס לנקודת ההמראה של המשתמש). ניתן להשתמש בגובה המוחלט במיפוי. הגובה היחסי נשמר בקובץ XMP.
ש: כיצד אוכל לצלם צילום אלכסוני באמצעות ה- Phantom 4 RTK? ת: ניתן לרכוש תמונות מלוכסנות במצב פוטוגרמטריה באפליקציית GS RTK. במצב "פוטוגרמטריה", באפשרותך להתאים את זווית ההטיה של הג'מבל מ -90 ° עד -45 ° בהגדרות המצלמה לכל תוכנית טיסה. המשתמש יכול להגדיר רק ערך זווית גימבל אחד בכל פעם. על מנת לקבל זוויות מרובות, עליך לתכנן את אותה המשימה ולהגדיר את זווית המצלמה הרצויה.
ש: האם אפשר ליצור מודל תלת מימד או ענן נקודה עם תוכנת צד שלישי באמצעות תמונות שצולמו על ידי P4 RTK? אם כן, מהו הדיוק של המודל שהתקבל? ת: כן, זה אפשרי. עם זאת, הדיוק יהיה תלוי באלגוריתם הפוטוגרמטריה של תוכנת צד שלישי בשימוש. יש להתייעץ עם ספק התוכנה לגבי הדיוק הצפוי.
ש: מהי הדרך הטובה ביותר להשתמש ב- P4 RTK למיפוי מסדרון? ת: במקרים בהם נתונים נאספים על גבי תשתיות או מסדרון צר אחר, היזם ממליץ להגדיר גורם חפיפה גבוה, לטוס מעל לנורמה ולתכנן לפחות שני שבילי טיסה לאותו מסדרון.
ש: האם ה- Phantom 4 RTK תואם לתחנות בסיס של צד שלישי? ת: לא, לא ניתן לחבר תחנות בסיס של צד שלישי לרכבי P4 RTK או לרדיו. עם זאת, ניתן לקבל נתונים משרת RTK ברשת באמצעות פרוטוקול Ntrip בסביבת רשת 4G / Wi-Fi. ניתן גם לאחסן נתוני תצפית לוויינית במזל"ט לצורך עיבוד לאחר (PPK).
סרטונים
סרטוני וידאו ממל"טים DJI Phantom 4 RTK.
.










