
- 1 소개
- 2 기능
- 3 패키지 내용물
- 4 사양
- 4.1 드론
- 4.2 매핑 기능
- 4.3 비주얼 포지셔닝
- 4.4 카메라
- 4.5 배터리
- 4.6 스마트 충전 스테이션
- 4.7 GNSS
- 4.8 서스펜션
- 4.9 적외선 시스템
- 4.10 제어판
- 5 외관
- 6 카메라
- 7 포지셔닝 시스템
- 8 TimeSync
- 9 OcuSync 2.0
- 10 GS RTK 애플리케이션
- 11 D-RTK 모바일 스테이션 2
- 12 모바일 SDK 지원
- 13 팬텀 4 RTK의 실제
- 14 가격
- 15 FAQ
- 15.1 드론
- 15.2 카메라
- 15.3 리모콘
- ) 15.4 비디오 스트림
- 15.5 배터리
- 15.6 포지셔닝
- 15.7 소프트웨어
- 15.8 매핑
- 16 비디오
소개
10월 15일, 민간 무인항공기 및 항공 사진 기술의 세계적인 리더 - DJI Innovations최고급 4위의 상용 버전팬텀. Phantom 4 RTK는 매핑 및 검사와 같은 분야에서 산업 사용자의 특정 요구를 충족하도록 설계된 매우 정확하고 강력한 이미징 시스템입니다.
기능
- 새로운 RTK 모듈
- 가장 적은 제어점으로 센티미터 포지셔닝 정확도
- 수평면에서 포지셔닝 정확도: 1cm 1md
- 수직면에서 위치 정확도: 1.5cm 1md
- 수평면에서 사진 측량 모델의 절대 정확도: 5cm*
- 새로운 TimeSync 보정 시스템
- 새로운 비행 계획 애플리케이션 GS RTK
- 2개의 글라이딩 모드
- 기계식 1인치 20MP CMOS 센서에 구축된 정밀 이미지 처리 시스템 셔터
- 모바일 SDK 지원
- OcuSync 2.0 전송 시스템
- 이동국 D-RTK 2와 완벽하게 호환
- 수도권 작업에 적합
*맑은 날씨에 고도 100m에서 비행할 때 지상의 픽셀 크기(GSD) 2.74 센티미터.

패키지 내용물
팬텀 4 RTK의 패키지 내용물은 전적으로 고객(사용자). 드론을 주문하려면 가까운 DJI 공식 판매점에 연락하거나 공식 웹사이트를 통해 DJI 팀에 연락처 정보를 보내 연락할 수 있도록 하는 것이 좋습니다.
기본 키트 포함:
- 팬텀 4 RTK
- 5.5인치 슈퍼 브라이트 디스플레이가 내장된 컨트롤러,
- P4 RTK용 스마트 배터리 2개,
- 제어판용 스마트 배터리 1개,
- 두 배터리 동시 충전용 충전기,
- 충전기 전원 어댑터 연결 케이블,
- 로터 8개(4CW / 4CCW)
- 카메라 짐벌 잠금 장치
- 16GB MicroSD
- 배송 케이스
- Micro-USB 케이블
- USB-C 케이블
- USB-C OTG 케이블.

사양
드론
매핑 기능

시각적 포지셔닝
카메라
배터리
)지능형 충전 스테이션

GNSS
외관
) 



카메라
기본적으로 1인치 20메가픽셀 CMOS 센서는 움직이는 촬영 시 이미지 왜곡을 제거하는 기계식 셔터와 함께 작동하므로 매핑 임무나 정기적인 데이터 수집이 원활하게 이루어집니다. 높은 해상도 덕분에 팬텀 4 RTK는 100미터 높이에서 2.74cm의 GSD에 도달할 수 있습니다. 이 전례 없는 정확도를 보장하기 위해 각 렌즈는 방사형 및 접선 렌즈 왜곡을 측정하는 엄격한 보정 프로세스를 거칩니다. 수집된 왜곡 매개변수는 각 이미지의 메타데이터에 저장되어 모든 사용자에 대해 후처리 소프트웨어를 개별적으로 조정할 수 있습니다.

RTK 적용 범위가 없는 지역에서 Phantom 4 RTK는 PPK(Post Processing Kinematic) 운동학을 활성화합니다. 드론은 원래 위성 관측 데이터와 천체력 데이터를 캡처하여 RTCM 3.2 형식의 PPKRAW.bin 파일에 저장합니다. 또한 P4 RTK는 위성 데이터를 즉석에서 RINEX(수신기 독립 교환 형식)로 변환하고 RINEX.obs 파일에 기록합니다. Timestamp. MRK 파일은 GNSS와 카메라의 위치를 내부적으로 동기화하여 이미지의 매우 정확한 위치에 대한 정확한 기록을 제공합니다. 작업과 관련된 모든 데이터는 각 개별 임무에 대한 고유한 폴더의 microSD 카드에 저장됩니다. 팬텀 4 RTK 데이터 일관성은 검증 시간을 줄이고 최소한의 수동 조정으로 효율적인 사후 처리 워크플로를 가능하게 합니다.
포지셔닝 시스템

수신된 데이터의 실시간 센티미터 포지셔닝 정확도.
RTK 모듈이 없으면 무인 항공기는 평방 킬로미터당 최대 40개의 지상 제어 지점(GCP)을 필요로 하며, 이는 실제로 시간이 많이 소요됩니다. DJI Phantom 4 RTK에는 고성능 이미징 시스템과 함께 작동하는 센티미터 정밀도의 RTK 포지셔닝 내비게이션 시스템이 내장되어 있습니다. Tandem은 잠재적으로 '0'에 필요한 중단점 수를 줄여 최소 75%의 설정 시간을 절약합니다.

RTK 수신기 바로 아래에는 대도시와 같은 저신호 지역에서 안정적인 비행을 위한 백업 GNSS 모듈이 있습니다. 팬텀 4 RTK 모듈식 탠덤은 복잡한 측량, 매핑 및 검사 워크플로를 위해 비행 안전과 가장 정확한 데이터를 최적화했습니다.
RTK 모듈은 1cm 1ppm(수평), 1.5cm 1ppm(수직) 위치 정확도를 제공할 수 있으며 팬텀 4 RTK는 수평면에서 5cm 절대 사진 측량 모델 정확도를 달성할 수 있습니다. * 맑은 날씨에 고도 100m, 지상 픽셀 크기(GSD) 2.74cm) 비행 시.
TimeSync
![]()
정확한 데이터 수집을 위한 새로운 시스템 - TimeSync. 비행 컨트롤러, 카메라 및 RTK 모듈의 지속적인 정렬을 제공합니다. 또한 TimeSync는 모든 사진이 가장 정확한 메타데이터를 사용하고 CMOS 중심에서 캡처하도록 하여 사진 측량 기술을 사용하여 결과를 최적화하여 이미지가 센티미터 수준에서 위치 데이터와 일치하도록 합니다.
OcuSync 2.0

OcuSync 2.0 영상 전송 시스템은 관제 장비와 드론 사이에 안정적인 전파 방해 방지 연결을 제공합니다. 비디오 링크 품질 720p로 최대 10km 떨어져 있어 넓은 지역 매핑에 이상적입니다. 최대 30분의 비행 시간 간격으로 조종사는 배터리를 교체하기 위해 착륙할 필요 없이 더 긴 임무를 완료할 수 있습니다.
하나의 배터리가 전체 작업 영역을 커버하기에 충분하지 않더라도 전원을 변경한 후 "작동 재개"는 자동으로 GS RTK 애플리케이션을 재개합니다.
GS RTK 앱
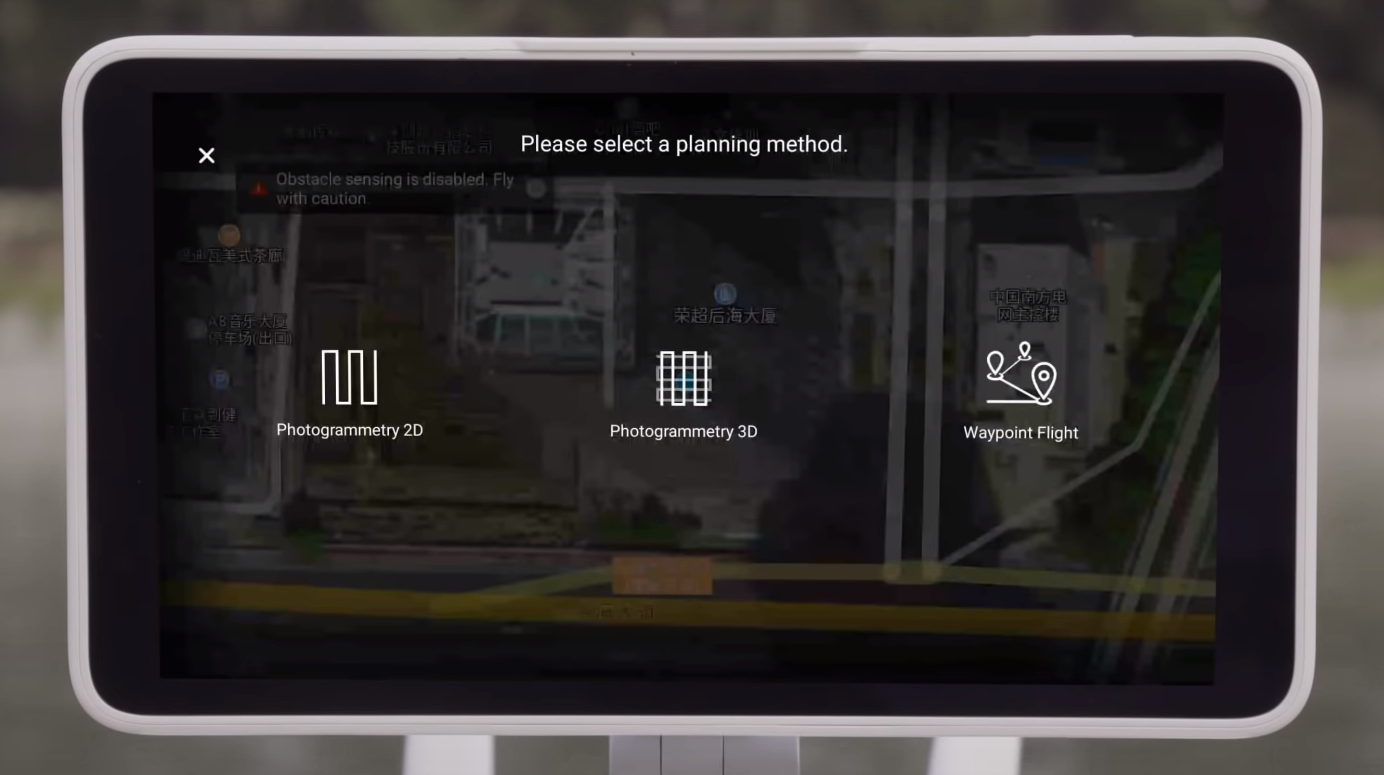
기존 비행 모드와 함께 새로운 GS RTK 앱은 조종사가 두 가지 계획 모드(사진 측량 및 Waypoint Flight) 덕분에 드론을 더 잘 제어할 수 있습니다. 계획 모드를 사용하면 사용자가 드론의 비행 경로를 선택하는 동시에 오버랩 비율, 고도, 속도, 카메라 매개변수 등을 조정하여 출력에서 자동화된 매핑 프로세스 또는 워크플로 제어를 제공할 수 있습니다. 예정된 출발은 쉽게 반복할 수 있으므로 제어 영역의 변경 사항을 추적하기 위해 다른 기간 동안 동일한 데이터를 수집할 수 있습니다.

사무실에서 비행을 계획하기 위해 GS RTK 응용 프로그램은 KML 및 KMZ 파일을 직접 다운로드합니다. 새로운 셔터 우선 모드는 강풍 조건에서 자율적으로 비행할 때도 안정적인 노출을 보장합니다.
D-RTK 모바일 스테이션 2

팬텀 4 RTK는 D-RTK 모바일과 완벽하게 호환됩니다. 드론에 실시간으로 차등 데이터를 제공하고 정확한 측지 솔루션을 형성하는 역할을 하는 스테이션 2. OcuSync 2.0 비디오 전송 시스템과 결합된 D-RTK 2,보호 등급IP67,의 견고한 설계는 사용자가 어려운 조건에서도 센티미터 단위의 정확한 데이터를 수신하도록 합니다. 팬텀 4 RTK는 NTRIP 프로토콜(인터넷을 통한 차동 스트리밍 GPS) 또는 사후 처리(PPK - Post Processing Kinematic)의 운동학 방법으로 후속 처리를 위해 수신된 모든 데이터를 저장할 수 있습니다.
모바일 SDK 지원
팬텀 4 RTK는 DJI 모바일 SDK와 호환되므로 사용자가 자동화 및 드론 기능에 직접 액세스할 수 있습니다. 모바일 장치를 통한 사용자 정의.
Phantom 4 RTK 실행

DJI는 운송 인프라의 주요 업체인 유럽 건설 대기업 Strabag SE와 긴밀히 협력하고 있습니다. 비용을 절감하고 노동 생산성을 높이기 위해 2010년부터 여러 매핑 프로젝트에서 무인 기술을 사용하여 회사는 3D 모델링에서 항공 사진을 사용하는 이점을 인식하게 되었습니다. Strabag SE의 이러한 작업을 위한 최신 도구는 DJI Phantom 4 RTK입니다.
“드론을 매핑 목적으로 사용하면 많은 이점이 있습니다. Strabag SE의 자산 및 UAV 디지털 평가 책임자인 Thomas Groeninger는 이러한 통합으로 워크플로가 바뀌고 많은 운영 단계가 간소화되었다고 말했습니다. "기존 측량 방법은 3D 모델도 제공하지만 드론 데이터에서 생성된 디지털 지형 모델은 높은 포인트 밀도를 제공하므로 더 자세한 정보를 제공합니다."
가격
드론을 주문하려면 가까운 DJI 공식 판매점에 문의하거나 DJI 팀에 연락처를 보내는 것이 좋습니다. 공식 웹사이트를 통해 연락할 수 있습니다.
- 팬텀 4 RTK - 5700 €
- 모바일 스테이션 D-RTK 2 - 3600€
- 팬텀 4 RTK 모바일 스테이션 D-RTK 2 - 7800 €
FAQ
드론

Q: 팬텀은 무엇을 만드는가 이전 Phantom 모델과 다른 4개의 RTK? A: 이전의 모든 Phantom 시리즈는 전문 사진가와 드론 애호가를 대상으로 했으며 Phantom 4 RTK는 정밀 매핑 및 검사와 같은 분야의 산업 사용자를 위해 설계되었습니다. P4 RTK는 유사한 카메라, 모양 및 크기를 계승할 뿐만 아니라 RTK 포지셔닝 모듈, 새로운 TimeSync 시스템, 매핑 애플리케이션 등을 추가합니다.
Q: 팬텀 4 RTK에는 어떤 프로펠러가 있습니까? A: P4 RTK에는 Phantom 4 Pro 과 함께 제공되는 표준 9450 소품이 장착되어 있습니다.
Q: 다른 국가 및 지역에서 팬텀 4 RTK를 시험 사용할 수 있습니까? A: 아니요, P4 RTK에는 여러 국가 및/또는 지역에 대한 특정 버전이 있습니다. 사용자는 제품 포장 또는 GS RTK 앱(펌웨어의 드론 정보 섹션)을 통해 버전 코드를 확인할 수 있습니다.
카메라
Q: 팬텀 4 RTK와 팬텀 4 Pro/Advanced 카메라의 차이점은 무엇인가요? A: 3개 모두 동일한 1인치 2000만 화소 CMOS 센서로 제작되었지만 P4 RTK 카메라는 새로운 렌즈 왜곡 기록 프로세스를 통해 개선되었습니다. 각 P4 RTK 카메라는 보정 절차를 거치며 렌즈 왜곡이 측정되고 해당 OPEN-CV 매개변수가 기록됩니다. 카메라를 통해 왜곡 보정 없이 원본 이미지를 출력할 수 있으며 XMP 파일에 기록된 OPEN-CV 왜곡 매개변수를 후처리에 사용할 수 있습니다.
Q: 팬텀 4 RTK에서 팬텀 4 Pro ND 필터를 사용할 수 있나요? A: 예, P4Pro 용으로 만들어진 ND 필터는 P4 RTK에서도 사용할 수 있습니다.
Q: 항공기의 디지털 신호 처리기(DSP)가 카메라 왜곡 보정을 지원합니까? A: 아니오, 사용자는 카메라 내 왜곡 보정을 활성화할 수 있지만 이미지 충실도는 후처리 소프트웨어의 왜곡 보정보다 열등합니다.
조종기
![]()
Q: 팬텀 4 RTK 조종기와 팬텀 4 Pro의 차이점은 무엇인가요? 조종기? A: P4 RTK 제어판은 microSD 슬롯, 내장 스피커, 핫 스왑 가능한 배터리를 포함하여 산업 사용자의 요구를 충족시키기 위해 많은 변경을 받았습니다. 또한 사용자는 제어 장비를 인터넷에 연결하여 4G 키로 Network RTK를 작동할 수 있습니다. 마지막으로, 특별히 설계된 새로운 GS RTK 애플리케이션이 이미 모든 장치에 사전 설치되어 있어 작업자가 포장을 푼 직후 데이터 수집 작업을 시작할 수 있습니다.
![]()
Q: P4 RTK를 팬텀 4 Pro 컨트롤 기어로 제어할 수 있나요? A: 아니요.
Q: FCC와 CE 모드 사이를 전환할 수 있습니까? О: 모드 간 전환이 불가능합니다.
비디오 스트림
Q: 팬텀 4 RTK에서 FPV 거리는 얼마입니까? A: 유효 FPV 오프셋 거리는 사용자의 작동 방법(예: 안테나 위치)과 유인 구역의 실제 환경에 따라 다릅니다. 개방 및 비폐쇄 환경에서 최대 FPV 거리는 10km(FCC 5.8GHz의 경우) 및 6km(CE 2.4GHz의 경우)입니다.
Q: P4 RTK가 비디오 전송 신호를 잃어버리면 시작된 매핑 임무를 계속할 수 있습니까? A: 예, 비디오 전송 신호가 손실된 경우 사용자는 장비를 다시 시작하고 임무를 계속할 수 있습니다.
배터리

Q: 팬텀 4 RTK에서 P4 Pro 배터리를 사용할 수 있나요? A: 네, 드론 배터리는 완전히 교체할 수 있습니다.
Q: P4 RTK 배터리를 완전히 충전하는 데 얼마나 걸립니까? A: 완전히 충전하는 데 60분이 채 걸리지 않습니다.
Q: 배터리 관리 및 보관은 어떻게 해야 하나요? A: 건조한 곳에 보관하십시오. 장기간 보관하기 전에 성능을 유지하기 위해 배터리를 50% 이상 충전하고 3개월마다 방전해야 합니다.
Q: 드론 배터리를 저온 환경에서도 사용할 수 있나요? A: 배터리 성능은 온도에서 급격히 떨어집니다.
Q: 매핑 및 검사 기능이 있는 응용 프로그램은 무엇입니까? A: 사전 설치된 GS RTK 애플리케이션은 매핑 및 검사에 사용할 수 있습니다. 또한 사용자는 DJI Mobile SDK에서 생성된 애플리케이션을 설치할 수 있습니다.
Q: 팬텀 4 RTK의 RTH(Return to Home) 동작이 팬텀 4 Pro와 다른가요? A: 아니요, RTH P4 RTK 모드는 거의 동일합니다.
Q: P4 RTK의 웨이포인트 설정에 제한이 있나요? A: 네, 포인트 간의 거리는 2km를 초과할 수 없으며, 총 포인트 수는 99개를 초과할 수 없으며, 비행 계획의 길이는 15km를 초과할 수 없습니다.
Q: 웨이포인트 설정을 위해 경도와 위도 값을 입력할 수 있나요? A: 아니요.
Q: GS RTK가 가져온 KML 파일을 통해 지원할 수 있는 경계 지점의 최대 수는 몇 개입니까? A: 현재 애플리케이션은 최대 99개의 경계 지점을 지원합니다.
매핑

Q: 팬텀 4 RTK는 어떤 차등 데이터 형식을 지원합니까? A: P4 RTK는 현재 RTCM3.2 형식의 RTCM 3.0, RTCM 3.1, MSM4 및 MSM5를 지원합니다.
Q: 팬텀 4 RTK로 측정한 좌표는 사용자가 선택한 좌표계에서 절대 좌표입니까? A: 네, 절대적으로요.
Q: GSD 값을 기준으로 요구 비행 고도를 계산하는 방법은 무엇입니까? A: 적절한 고도를 추정하려면 다음 방정식을 참조하십시오. H = 36 * GSD. 지상 픽셀(GSD)의 크기는 센티미터로 측정되고 값 "H"(고도 또는 비행 고도)는 미터로 측정된다는 사실에 주목할 가치가 있습니다.
Q: P4 RTK로 캡처한 이미지는 고도 데이터를 저장합니까? 그렇다면 이 데이터는 어떻게 저장됩니까? A: 네, 그렇습니다. 해발 고도 및 상대 고도(사용자의 이륙 지점 기준). 절대 높이는 매핑에 사용할 수 있습니다. 상대 높이는 XMP 파일에 저장됩니다.
Q: 팬텀 4 RTK로 사선 사진을 어떻게 캡처합니까? A: GS RTK 앱의 사진 측량 모드에서 기울어진 이미지를 얻을 수 있습니다. "사진 측량" 모드에서는 각 비행 계획에 대한 카메라 설정에서 짐벌 틸트 각도를 -90°에서 -45°까지 조정할 수 있습니다. 사용자는 한 번에 하나의 짐벌 각도 값만 설정할 수 있습니다. 여러 앵글을 얻기 위해서는 같은 미션을 계획하고 원하는 카메라 앵글을 설정해야 합니다.
Q: P4 RTK로 캡처한 이미지를 사용하여 타사 소프트웨어로 3D 모델 또는 포인트 클라우드를 생성할 수 있습니까? 그렇다면 결과 모델의 정확도는 얼마입니까? A: 네, 가능합니다. 그러나 정확도는 사용된 타사 소프트웨어 사진 측량 알고리즘에 따라 달라집니다. 예상 정확도는 소프트웨어 공급업체에 문의해야 합니다.
Q: 복도 매핑에 P4 RTK를 사용하는 가장 좋은 방법은 무엇입니까? A: 데이터가 기반 시설 또는 기타 좁은 회랑을 통해 수집되는 경우 개발자는 높은 중첩 계수를 설정하고 정상 이상으로 비행하고 동일한 회랑에 대해 최소 2개의 비행 경로를 계획할 것을 권장합니다.
Q: 팬텀 4 RTK는 타사 기지국과 호환됩니까? A: 아니요, 타사 기지국을 P4 RTK 또는 무선 제어 장비에 연결할 수 없습니다. 단, 4G/Wi-Fi 네트워크 환경에서는 Ntrip 프로토콜을 통해 네트워크 RTK 서버로부터 데이터 수신이 가능합니다. 위성 관측 데이터는 후처리(PPK)를 위해 드론에도 저장할 수 있다.
비디오
DJI 팬텀 4 RTK 드론의 비디오.
.






