
- 1 บทนำ
- 2 คุณสมบัติ
- 3 เนื้อหาแพ็คเกจ
- 4 ข้อมูลจำเพาะ
- 4.1 โดรน
- 4.2 ฟังก์ชั่นการทำแผนที่
- 4.3 การวางตำแหน่งภาพ
- 4.4 กล้อง
- 4.5 แบตเตอรี่
- 4.6 สถานีชาร์จอัจฉริยะ
- 4.7 GNSS
- 4.8 ช่วงล่าง
- 4.9 ระบบอินฟราเรด
- 4.10 แผงควบคุม
- 5 ลักษณะที่ปรากฏ
- 6 กล้อง
- 7 ระบบกำหนดตำแหน่ง
- 8 TimeSync
- 9 OcuSync 2.0
- 10 GS RTK Application
- 11 สถานีเคลื่อนที่ D-RTK 2
- รองรับ 12 Mobile SDK
- 13 Phantom 4 RTK ในทางปฏิบัติ
- 14 ราคา
- 15 คำถามที่พบบ่อย
- 15.1 โดรน
- 15.2 กล้องถ่ายรูป
- 15.3 รีโมทคอนโทรล
- ) 15.4 วิดีโอสตรีม
- 15.5 แบตเตอรี่
- 15.6 ตำแหน่ง
- 15.7 ซอฟต์แวร์
- 15.8 การทำแผนที่
- 16 วิดีโอ
บทนำ
เมื่อวันที่ 15 ตุลาคม ผู้นำระดับโลกด้านยานยนต์ไร้คนขับพลเรือนและเทคโนโลยีการถ่ายภาพทางอากาศ - DJI Innovationsรุ่นเชิงพาณิชย์Phantom. Phantom 4 RTK เป็นระบบภาพที่มีความแม่นยำสูงและทรงพลัง ออกแบบมาเพื่อตอบสนองความต้องการเฉพาะของผู้ใช้ในอุตสาหกรรมในด้านต่างๆ เช่น การทำแผนที่และการตรวจสอบ
คุณสมบัติ
- โมดูล RTK ใหม่
- ความแม่นยำของตำแหน่งเซนติเมตรพร้อมจุดควบคุมน้อยที่สุด
- ความแม่นยำของตำแหน่งในระนาบแนวนอน: 1cm 1md
- ความแม่นยำของตำแหน่ง ในระนาบแนวตั้ง: 1.5cm 1md
- ความแม่นยำแน่นอนของแบบจำลองโฟโตแกรมเมตริกในระนาบแนวนอน: 5 ซม.*
- ระบบแก้ไข TimeSync ใหม่
- แอปพลิเคชั่นวางแผนการบินใหม่ GS RTK
- 2 โหมดการร่อน
- ระบบประมวลผลภาพที่แม่นยำสร้างขึ้นบนเซ็นเซอร์ CMOS ขนาด 1 นิ้ว 20MP พร้อมกลไก ชัตเตอร์
- รองรับ Mobile SDK
- ระบบส่งสัญญาณ OcuSync 2.0
- เข้ากันได้อย่างสมบูรณ์กับสถานีมือถือ D-RTK 2
- ดัดแปลงสำหรับการทำงานในเขตปริมณฑล
*เมื่อบินในสภาพอากาศที่มีแดดจัดที่ระดับความสูง 100 ม. ขนาดพิกเซลบนพื้นดิน (GSD) 2.74 ซม.

เนื้อหาในแพ็คเกจ
เนื้อหาในแพ็คเกจของ Phantom 4 RTK ทั้งหมดขึ้นอยู่กับงานที่กำหนดโดยลูกค้า (ผู้ใช้). ในการสั่งซื้อโดรน ขอแนะนำให้คุณติดต่อตัวแทนจำหน่าย DJI อย่างเป็นทางการใกล้บ้านคุณ หรือส่งข้อมูลติดต่อของคุณไปยังทีม DJI ผ่านเว็บไซต์ทางการเพื่อให้ติดต่อคุณได้
ชุดพื้นฐานจะประกอบด้วย:
- Phantom 4 RTK
- คอนโทรลเลอร์พร้อมจอแสดงผล super bright ขนาด 5.5 นิ้วในตัว
- 2 × แบตเตอรี่อัจฉริยะสำหรับ P4 RTK,
- 1 × แบตเตอรี่อัจฉริยะสำหรับแผงควบคุม,
- เครื่องชาร์จสำหรับการชาร์จแบตเตอรี่ทั้งสองพร้อมกัน
- การเชื่อมต่ออะแดปเตอร์แปลงไฟเครื่องชาร์จ สายเคเบิล,
- 8 × โรเตอร์ (4CW / 4CCW)
- ล็อค gimbal ของกล้อง
- 16GB MicroSD
- กล่องจัดส่ง
- Micro-USB สายเคเบิล
- สายเคเบิล USB-C
- สายเคเบิล USB-C OTG

ข้อมูลจำเพาะ
เสียงพึมพำ
ฟังก์ชันการทำแผนที่

การวางตำแหน่งภาพ
กล้อง
แบตเตอรี่
สถานีชาร์จอัจฉริยะ

GNSS
ลักษณะที่ปรากฏ
) 



กล้อง
ที่แกนกลางของเซ็นเซอร์ CMOS ขนาด 1 นิ้ว 20 เมกะพิกเซลทำงานควบคู่กับชัตเตอร์กลไกที่ขจัดความผิดเพี้ยนของภาพเมื่อถ่ายภาพแบบเคลื่อนไหว ซึ่งช่วยให้ทำภารกิจการทำแผนที่หรือการรวบรวมข้อมูลปกติได้อย่างราบรื่น ด้วยความละเอียดสูง Phantom 4 RTK สามารถเข้าถึง GSD 2.74 ซม. จากความสูง 100 เมตร เพื่อให้มั่นใจถึงความแม่นยำที่ไม่เคยมีมาก่อน เลนส์แต่ละตัวต้องผ่านกระบวนการปรับเทียบที่เข้มงวดซึ่งวัดความผิดเพี้ยนของเลนส์ในแนวรัศมีและแนวดิ่ง พารามิเตอร์การบิดเบือนที่รวบรวมไว้จะถูกบันทึกไว้ในข้อมูลเมตาของแต่ละภาพ ซึ่งช่วยให้สามารถปรับซอฟต์แวร์หลังการประมวลผลสำหรับผู้ใช้แต่ละคนได้

ในพื้นที่ที่ไม่มี RTK ครอบคลุม Phantom 4 RTK จะเปิดใช้งานจลนศาสตร์หลังการประมวลผล Kinematic (PPK) โดรนจะบันทึกข้อมูลการสังเกตการณ์ดาวเทียมดั้งเดิมรวมถึงข้อมูล ephemeris และบันทึกไว้ในไฟล์ PPKRAW.bin ในรูปแบบ RTCM 3.2 นอกจากนี้ P4 RTK จะแปลงข้อมูลดาวเทียมทันทีเป็น RINEX (Receiver Independent Exchange Format) และเขียนลงในไฟล์ RINEX.obs
ด้วยการซิงโครไนซ์ตำแหน่งของ GNSS และกล้องภายใน ไฟล์ Timestamp. MRK จะให้บันทึกตำแหน่งที่แม่นยำสูงของภาพอย่างแม่นยำ ข้อมูลทั้งหมดที่เกี่ยวข้องกับการดำเนินการจะถูกเก็บไว้ในการ์ด microSD ในโฟลเดอร์เฉพาะสำหรับแต่ละภารกิจ ความสอดคล้องของข้อมูล Phantom 4 RTK ช่วยลดเวลาในการตรวจสอบและช่วยให้เวิร์กโฟลว์หลังการประมวลผลมีประสิทธิภาพด้วยการปรับด้วยตนเองน้อยที่สุด
ระบบกำหนดตำแหน่ง

ความถูกต้องของตำแหน่งเซนติเมตรแบบเรียลไทม์ของข้อมูลที่ได้รับ
หากไม่มีโมดูล RTK อากาศยานไร้คนขับต้องใช้จุดควบคุมภาคพื้นดิน (GCP) มากถึง 40 จุดต่อตารางกิโลเมตร ซึ่งใช้เวลานานในทางปฏิบัติ DJI Phantom 4 RTK มีระบบนำทางตำแหน่ง RTK ที่มีความแม่นยำเป็นเซนติเมตรในตัว ซึ่งทำงานร่วมกับระบบภาพประสิทธิภาพสูงควบคู่อาจลดจำนวนเบรกพอยต์ที่จำเป็นสำหรับ "0" ซึ่งช่วยประหยัดเวลาในการตั้งค่าได้อย่างน้อย 75%

ด้านล่างเครื่องรับ RTK โดยตรงคือโมดูล GNSS สำรองสำหรับเที่ยวบินที่เสถียรในพื้นที่สัญญาณต่ำเช่นเมืองใหญ่ โมดูลควบคู่ Phantom 4 RTK เพิ่มประสิทธิภาพการบินที่ปลอดภัยและข้อมูลที่แม่นยำที่สุดสำหรับขั้นตอนการสำรวจที่ซับซ้อน การทำแผนที่ และการตรวจสอบที่ซับซ้อน
โมดูล RTK สามารถให้ความแม่นยำในการวางตำแหน่ง 1 ซม. 1ppm (แนวนอน), 1.5 ซม. 1ppm (แนวตั้ง) และ Phantom 4 RTK สามารถบรรลุความแม่นยำของแบบจำลองโฟโตแกรมเมตริกสัมบูรณ์ 5 ซม. ในระนาบแนวนอน * (* เมื่อบินในสภาพอากาศที่มีแดดจัดที่ระดับความสูง 100 เมตร ขนาดพิกเซลภาคพื้นดิน (GSD) 2.74 ซม.
TimeSync
![]()
ระบบใหม่สำหรับการรวบรวมข้อมูลที่แม่นยำ - TimeSync ให้การจัดตำแหน่งตัวควบคุมการบิน กล้อง และโมดูล RTK อย่างต่อเนื่อง นอกจากนี้ TimeSync ยังช่วยให้มั่นใจได้ว่าภาพถ่ายทุกภาพใช้เมตาดาต้าที่แม่นยำที่สุดและจับภาพไว้ที่กึ่งกลาง CMOS ซึ่งจะปรับผลลัพธ์ให้เหมาะสมที่สุดโดยใช้เทคนิคโฟโตแกรมเมตริก ทำให้ภาพสามารถจับคู่ข้อมูลตำแหน่งที่ระดับเซนติเมตร
OcuSync 2.0

ระบบส่งสัญญาณวิดีโอ OcuSync 2.0 ให้การเชื่อมต่อที่เสถียรและป้องกันการรบกวนระหว่างอุปกรณ์ควบคุมกับโดรน ห่างออกไป 10 กม. ด้วยคุณภาพลิงก์วิดีโอ 720p เหมาะอย่างยิ่งสำหรับการทำแผนที่พื้นที่ขนาดใหญ่ ช่วงเวลาการบินสูงสุด 30 นาทีจะช่วยให้นักบินทำภารกิจได้ยาวนานขึ้นโดยไม่ต้องลงจอดเพื่อเปลี่ยนแบตเตอรี่
แม้ว่าแบตเตอรี่หนึ่งก้อนจะไม่เพียงพอที่จะครอบคลุมพื้นที่ทำงานทั้งหมด หลังจากเปลี่ยนพลังงานแล้ว “การดำเนินการใหม่” จะกลับมาใช้งานแอปพลิเคชัน GS RTK ต่อโดยอัตโนมัติ
แอป GS RTK
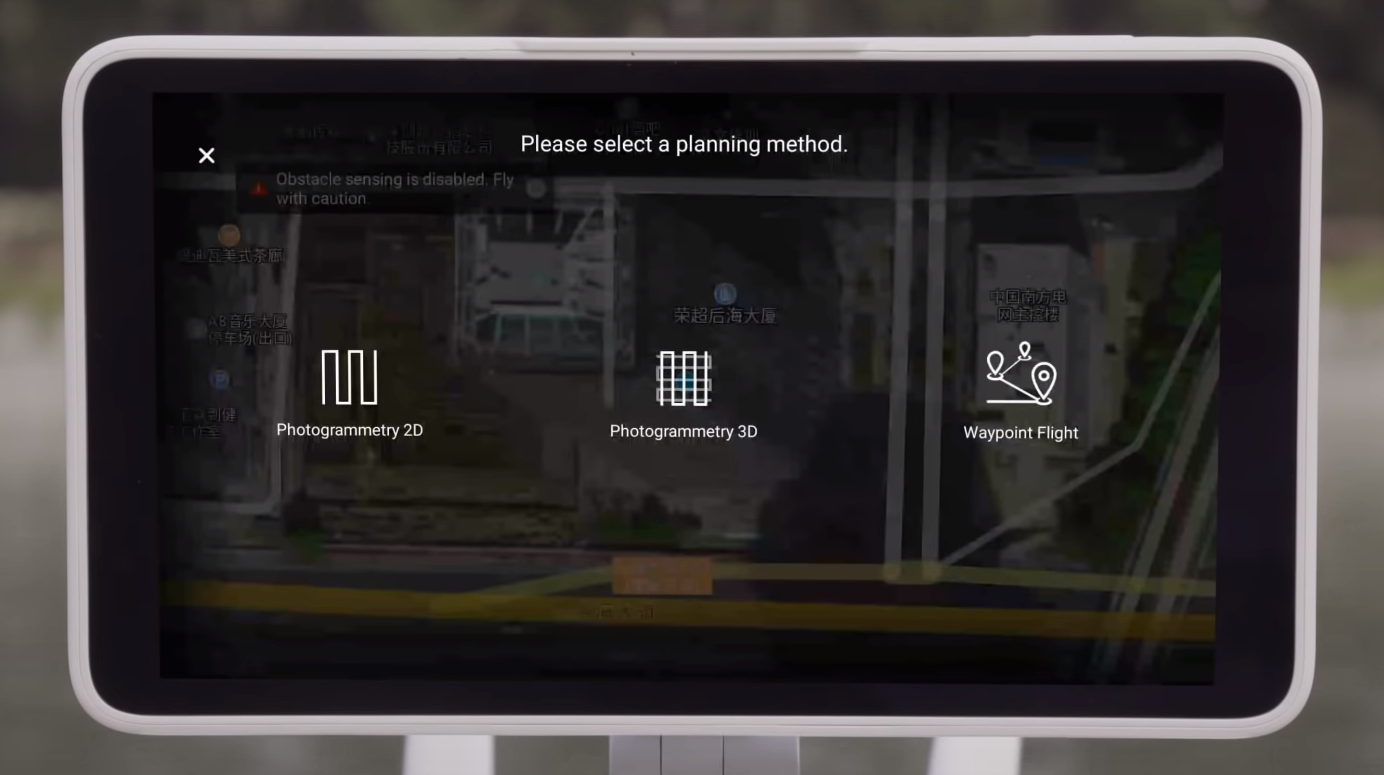
แอป GS RTK ใหม่พร้อมด้วยโหมดการบินแบบดั้งเดิมจะช่วยให้นักบินสามารถ ควบคุมโดรนอย่างชาญฉลาดยิ่งขึ้นด้วยโหมดการวางแผนสองโหมด - Photogrammetry และ Waypoint Flight โหมดการวางแผนช่วยให้ผู้ใช้สามารถเลือกเส้นทางการบินของโดรนได้ ในขณะเดียวกันก็ปรับอัตราส่วนการทับซ้อน ระดับความสูง ความเร็ว พารามิเตอร์ของกล้อง ฯลฯ พร้อมกัน ทำให้มีกระบวนการทำแผนที่อัตโนมัติหรือควบคุมเวิร์กโฟลว์ที่เอาต์พุต การออกเดินทางตามกำหนดการสามารถทำซ้ำได้ง่าย ซึ่งทำให้สามารถรวบรวมข้อมูลเดียวกันในช่วงเวลาต่างๆ เพื่อติดตามการเปลี่ยนแปลงใดๆ ในพื้นที่ควบคุมได้

ในการวางแผนเที่ยวบินในสำนักงาน แอปพลิเคชัน GS RTK จะดาวน์โหลดไฟล์ KML และ KMZ โดยตรง โหมด Shutter Priority ใหม่ช่วยให้มั่นใจได้ถึงการเปิดรับแสงที่มั่นคงแม้ในขณะที่บินอย่างอิสระในสภาพลมแรง
D-RTK Mobile Station 2

Phantom 4 RTK เข้ากันได้กับ D-RTK Mobile อย่างสมบูรณ์ สถานีที่ 2 ซึ่งรับผิดชอบในการให้ข้อมูลส่วนต่างแบบเรียลไทม์แก่โดรน และสร้างโซลูชัน geodetic ที่แม่นยำ การออกแบบที่แข็งแกร่งของระดับการป้องกัน D-RTK 2,IP67,ร่วมกับระบบส่งสัญญาณวิดีโอ OcuSync 2.0 ทำให้ผู้ใช้ได้รับข้อมูลที่แม่นยำเป็นเซนติเมตรแม้ในสภาวะที่ยากลำบาก
Phantom 4 RTK นั้นง่ายต่อการรวมเข้ากับเวิร์กโฟลว์ใด ๆ โดยการเชื่อมต่อระบบกำหนดตำแหน่งกับสถานีมือถือ D-RTK 2 ผ่านดองเกิล 4G หรือจุด Wi-Fi โดยใช้โปรโตคอล NTRIP (GPS สตรีมมิ่งที่แตกต่างกันผ่านอินเทอร์เน็ต) หรือคุณสามารถบันทึกข้อมูลที่ได้รับทั้งหมดสำหรับการประมวลผลในภายหลังโดยวิธีจลนศาสตร์ในการประมวลผลภายหลัง (PPK - Post Processing Kinematic)
รองรับ SDK มือถือ
Phantom 4 RTK เข้ากันได้กับ DJI Mobile SDK ทำให้ผู้ใช้เข้าถึงฟังก์ชั่นโดรนโดยตรงสำหรับการทำงานอัตโนมัติและ ปรับแต่งผ่านอุปกรณ์มือถือ
Phantom 4 RTK ในทางปฏิบัติ

DJI ทำงานอย่างใกล้ชิดกับ Strabag SE ยักษ์ใหญ่ด้านการก่อสร้างของยุโรปซึ่งเป็นผู้เล่นหลักในโครงสร้างพื้นฐานด้านการขนส่ง การใช้เทคโนโลยีไร้คนขับในโครงการแผนที่หลายโครงการตั้งแต่ปี 2010 เพื่อลดต้นทุนและเพิ่มผลิตภาพแรงงาน บริษัทได้ชื่นชมประโยชน์ของการใช้ภาพถ่ายทางอากาศในการสร้างแบบจำลอง 3 มิติ เครื่องมือล่าสุดสำหรับงานดังกล่าวสำหรับ Strabag SE คือ DJI Phantom 4 RTK
“มีประโยชน์มากมายในการใช้โดรนเพื่อจุดประสงค์ในการทำแผนที่ การบูรณาการของพวกเขาเปลี่ยนเวิร์กโฟลว์ของเราและทำให้ขั้นตอนการปฏิบัติงานง่ายขึ้น” Thomas Groeninger หัวหน้าฝ่ายการประเมินสินทรัพย์ดิจิทัลและ UAV ของ Strabag SE กล่าว "วิธีการสำรวจแบบธรรมดายังมีโมเดล 3 มิติด้วย แต่โมเดลภูมิประเทศแบบดิจิทัลที่สร้างจากข้อมูลโดรนนั้นให้ความหนาแน่นของจุดสูงและรายละเอียดมากขึ้น"
ราคา
ในการสั่งซื้อโดรน ขอแนะนำให้ติดต่อตัวแทนจำหน่าย DJI อย่างเป็นทางการที่ใกล้ที่สุดหรือส่งข้อมูลติดต่อของคุณไปยังทีมงาน DJI ผ่านทางเว็บไซต์ทางการเพื่อให้สามารถติดต่อคุณได้
- Phantom 4 RTK - 5700 €
- สถานีเคลื่อนที่ D-RTK 2 - 3600 €
- สถานีเคลื่อนที่ Phantom 4 RTK D-RTK 2 - 7800 €
คำถามที่พบบ่อย
เสียงหึ่งๆ

Q: อะไรทำให้ Phantom 4 RTK ที่แตกต่างจาก Phantom รุ่นก่อนๆ หรือไม่? A: Phantom 4 RTK รุ่นก่อนๆ ทั้งหมดได้รับการออกแบบมาสำหรับช่างภาพมืออาชีพและผู้ที่ชื่นชอบโดรน Phantom 4 RTK ได้รับการออกแบบมาสำหรับผู้ใช้ในอุตสาหกรรมในด้านต่างๆ เช่น การทำแผนที่ที่แม่นยำและการตรวจสอบP4 RTK สืบทอดกล้อง รูปร่าง และขนาดที่คล้ายกัน รวมทั้งการเพิ่มโมดูลการกำหนดตำแหน่ง RTK, ระบบ TimeSync ใหม่, แอปพลิเคชันการทำแผนที่ และอื่นๆ อีกมากมาย
ถาม: Phantom 4 RTK มีใบพัดอะไรบ้าง? A: P4 RTK ติดตั้งอุปกรณ์ประกอบฉากมาตรฐาน 9450 ที่มาพร้อมกับ Phantom 4 Pro
ถาม: ฉันสามารถขับ Phantom 4 RTK ในประเทศและภูมิภาคอื่นได้หรือไม่? A: ไม่ P4 RTK มีเวอร์ชันเฉพาะสำหรับประเทศและ / หรือภูมิภาคต่างๆ ผู้ใช้สามารถตรวจสอบรหัสเวอร์ชันได้โดยค้นหาบนบรรจุภัณฑ์ของผลิตภัณฑ์หรือผ่านแอป GS RTK (ในส่วนข้อมูลโดรนของเฟิร์มแวร์)
กล้อง
ถาม: กล้อง Phantom 4 RTK และ Phantom 4 Pro / Advanced แตกต่างกันอย่างไร? ตอบ: แม้ว่าทั้งสามจะถูกสร้างขึ้นบนเซนเซอร์ CMOS ขนาด 20 เมกะพิกเซลขนาด 1 นิ้ว 1 นิ้ว แต่กล้อง P4 RTK ก็ได้รับการปรับปรุงให้ดีขึ้นด้วยกระบวนการบันทึกภาพบิดเบี้ยวของเลนส์ใหม่ กล้อง P4 RTK แต่ละตัวจะผ่านขั้นตอนการปรับเทียบ ในระหว่างที่มีการวัดความผิดเพี้ยนของเลนส์และบันทึกพารามิเตอร์ OPEN-CV ที่สอดคล้องกัน กล้องช่วยให้คุณส่งออกภาพต้นฉบับโดยไม่แก้ไขความผิดเพี้ยน และสามารถใช้พารามิเตอร์การบิดเบือน OPEN-CV ที่บันทึกในไฟล์ XMP ในขั้นตอนหลังการประมวลผลได้
ถาม: เป็นไปได้ไหมที่จะใช้ฟิลเตอร์ Phantom 4 Pro ND บน Phantom 4 RTK? ตอบ: ใช่ ฟิลเตอร์ ND ที่สร้างขึ้นสำหรับ P4Pro อาจใช้กับ P4 RTK ได้เช่นกัน
ถาม: ตัวประมวลผลสัญญาณดิจิตอล (DSP) ของเครื่องบินรองรับการแก้ไขความผิดเพี้ยนของกล้องหรือไม่ A: ไม่ได้ ผู้ใช้สามารถเปิดใช้งานการแก้ไขความผิดเพี้ยนในกล้องได้ แต่แล้วความเที่ยงตรงของภาพจะด้อยกว่าการแก้ไขความผิดเพี้ยนในซอฟต์แวร์หลังการประมวลผล
รีโมทคอนโทรล
![]()
ถาม: อะไรคือความแตกต่างระหว่าง Phantom 4 RTK Remote Controller และ Phantom 4 Pro รีโมทคอนโทรล? A: แผงควบคุม P4 RTK ได้รับการเปลี่ยนแปลงหลายอย่างเพื่อตอบสนองความต้องการของผู้ใช้ในอุตสาหกรรม ซึ่งรวมถึง: ช่องเสียบ microSD, ลำโพงในตัว, แบตเตอรี่แบบ Hot-swap นอกจากนี้ ผู้ใช้สามารถเชื่อมต่ออุปกรณ์ควบคุมกับอินเทอร์เน็ตเพื่อใช้งาน Network RTK ด้วยคีย์ 4G สุดท้ายนี้ แอปพลิเคชัน GS RTK ที่ออกแบบมาเป็นพิเศษได้รับการติดตั้งไว้ล่วงหน้าในอุปกรณ์ทุกเครื่องแล้ว ทำให้ผู้ปฏิบัติงานเริ่มงานการรวบรวมข้อมูลได้ทันทีหลังจากแกะกล่อง
![]()
ถาม: P4 RTK สามารถควบคุมด้วยเกียร์ควบคุม Phantom 4 Pro ได้หรือไม่? ก: ไม่
ถาม: เป็นไปได้ไหมที่จะสลับระหว่างโหมด FCC และ CE О: ไม่สามารถสลับระหว่างโหมดต่างๆ ได้
สตรีมวิดีโอ
ถาม: ระยะห่าง FPV จาก Phantom 4 RTK คืออะไร? A: ระยะออฟเซ็ต FPV ที่มีประสิทธิภาพขึ้นอยู่กับวิธีการทำงานของผู้ใช้ (เช่น ตำแหน่งเสาอากาศ) และสภาพแวดล้อมจริงในพื้นที่ควบคุม ในสภาพแวดล้อมที่เปิดและไม่ปิด ระยะ FPV สูงสุดคือ 10 กม. (สำหรับ FCC 5.8GHz) และ 6 กม. (สำหรับ CE 2.4GHz)
ถาม: เป็นไปได้ไหมที่จะดำเนินภารกิจการทำแผนที่ที่เริ่มต้นต่อไป หากระหว่างการดำเนินการ P4 RTK สูญเสียสัญญาณการส่งสัญญาณวิดีโอ? ตอบ: ใช่ หากสัญญาณวิดีโอหายไป ผู้ใช้สามารถรีสตาร์ทอุปกรณ์และทำภารกิจต่อไปได้
แบตเตอรี่

ถาม: เป็นไปได้ไหมที่จะใช้แบตเตอรี่ P4 Pro ใน Phantom 4 RTK? ตอบ: ใช่ แบตเตอรีโดรนสามารถเปลี่ยนได้อย่างสมบูรณ์
ถาม: ใช้เวลานานเท่าใดในการชาร์จแบตเตอรี่ P4 RTK ให้เต็ม? A: ใช้เวลาไม่เกิน 60 นาทีในการชาร์จจนเต็ม
ถาม: การบำรุงรักษาและจัดเก็บแบตเตอรี่จำเป็นอย่างไร? A: เก็บในที่แห้ง ก่อนการจัดเก็บระยะยาว ตรวจสอบให้แน่ใจว่าชาร์จแบตเตอรี่ที่ 50% หรือสูงกว่า และคายประจุทุกสามเดือนเพื่อรักษาประสิทธิภาพ
ถาม: เป็นไปได้ไหมที่จะใช้แบตเตอรี่โดรนในสภาพแวดล้อมที่มีอุณหภูมิต่ำ? A: ประสิทธิภาพของแบตเตอรี่ลดลงอย่างมากในอุณหภูมิ
ถาม: แอปพลิเคชันใดบ้างที่มีฟังก์ชันการทำแผนที่และการตรวจสอบ A: แอปพลิเคชัน GS RTK ที่ติดตั้งไว้ล่วงหน้าสามารถใช้สำหรับการทำแผนที่และการตรวจสอบ นอกจากนี้ ผู้ใช้ยังสามารถติดตั้งแอปพลิเคชันที่สร้างใน DJI Mobile SDK ได้อีกด้วย
ถาม: พฤติกรรมการกลับบ้าน (RTH) ของ Phantom 4 RTK แตกต่างจาก Phantom 4 Pro หรือไม่? A: ไม่ โหมด RTH P4 RTK เกือบจะเหมือนกันทุกประการ
ถาม: มีข้อจำกัดในการตั้งค่าจุดอ้างอิงสำหรับ P4 RTK หรือไม่? A: ใช่ ระยะทางระหว่างจุดต่างๆ จะต้องไม่เกิน 2 กม. จำนวนคะแนนรวมต้องไม่เกิน 99 และความยาวของแผนการบินต้องไม่เกิน 15 กม.
ถาม: อนุญาตให้ป้อนค่าลองจิจูดและละติจูดเพื่อตั้งค่าจุดอ้างอิงหรือไม่ ก: ไม่
ถาม: จำนวนจุดขอบเขตสูงสุดที่ GS RTK สามารถรองรับผ่านไฟล์ KML ที่นำเข้าคือเท่าใด A: ขณะนี้แอปพลิเคชันรองรับจุดขอบเขตสูงสุด 99 จุด
การทำแผนที่

ถาม: Phantom 4 RTK รองรับรูปแบบข้อมูลส่วนต่างใดบ้าง A: P4 RTK รองรับ: RTCM 3.0, RTCM 3.1, MSM4 และ MSM5 ในรูปแบบ RTCM3.2
ถาม: พิกัดที่วัดโดย Phantom 4 RTK สัมบูรณ์ในระบบพิกัดที่ผู้ใช้เลือกหรือไม่? ก: ครับ แน่นอน
ถาม: จะคำนวณระดับความสูงของเที่ยวบินที่ต้องการตามค่า GSD ได้อย่างไร? A: ในการประมาณระดับความสูงที่เหมาะสม โปรดดูสมการ: H = 36 * GSD ควรให้ความสนใจกับความจริงที่ว่าขนาดของพิกเซลบนพื้น (GSD) วัดเป็นเซนติเมตรและวัดค่า "H" (ระดับความสูงหรือระดับความสูงของเที่ยวบิน) เป็นเมตร
ถาม: ภาพที่ถ่ายโดย P4 RTK บันทึกข้อมูลระดับความสูงหรือไม่ ถ้าเป็นเช่นนั้น ข้อมูลนี้จะถูกเก็บไว้อย่างไร? A: ใช่ พวกเขาทำ ระดับความสูงเหนือระดับน้ำทะเลและความสูงสัมพัทธ์ (สัมพันธ์กับจุดขึ้นลงของผู้ใช้) สามารถใช้ความสูงสัมบูรณ์ในการทำแผนที่ได้ ความสูงสัมพัทธ์ถูกเก็บไว้ในไฟล์ XMP
ถาม: ฉันจะถ่ายภาพเฉียงด้วย Phantom 4 RTK ได้อย่างไร A: สามารถรับภาพเอียงได้ในโหมด photogrammetry ในแอป GS RTK ในโหมด "Photogrammetry" คุณสามารถปรับมุมเอียงของ gimbal ได้ตั้งแต่ -90 ° ถึง -45 °ในการตั้งค่ากล้องสำหรับแผนการบินแต่ละแผน ผู้ใช้สามารถตั้งค่ามุมกิมบอลได้ครั้งละหนึ่งค่าเท่านั้น เพื่อให้ได้หลายมุม คุณต้องวางแผนภารกิจเดียวกันและตั้งค่ามุมกล้องที่ต้องการ
ถาม: เป็นไปได้ไหมที่จะสร้างโมเดล 3 มิติหรือ point cloud ด้วยซอฟต์แวร์ของบริษัทอื่นโดยใช้ภาพที่ถ่ายโดย P4 RTK ถ้าเป็นเช่นนั้นความถูกต้องของแบบจำลองที่ได้คืออะไร? ตอบ: ใช่ เป็นไปได้ อย่างไรก็ตาม ความแม่นยำจะขึ้นอยู่กับอัลกอริธึม photogrammetry ซอฟต์แวร์ของบริษัทอื่นที่ใช้ ควรปรึกษาผู้จำหน่ายซอฟต์แวร์เพื่อความถูกต้องที่คาดหวัง
ถาม: วิธีที่ดีที่สุดในการใช้ P4 RTK สำหรับการทำแผนที่ทางเดินคืออะไร? ก: ในกรณีที่ข้อมูลถูกเก็บรวบรวมผ่านโครงสร้างพื้นฐานหรือทางเดินแคบๆ อื่น ๆ ผู้พัฒนาแนะนำให้ตั้งค่าปัจจัยการทับซ้อนสูง บินเหนือปกติ และวางแผนอย่างน้อยสองเส้นทางบินสำหรับทางเดินเดียวกัน
ถาม: Phantom 4 RTK เข้ากันได้กับสถานีฐานของบริษัทอื่นหรือไม่? ตอบ: ไม่ ไม่สามารถเชื่อมต่อสถานีฐานภายนอกกับ P4 RTK หรืออุปกรณ์ควบคุมวิทยุ อย่างไรก็ตาม สามารถรับข้อมูลจากเซิร์ฟเวอร์เครือข่าย RTK ผ่านโปรโตคอล Ntrip ในสภาพแวดล้อมเครือข่าย 4G / Wi-Fi ข้อมูลการสังเกตการณ์ผ่านดาวเทียมยังสามารถเก็บไว้ในโดรนสำหรับขั้นตอนหลังการประมวลผล (PPK)
วิดีโอ
วิดีโอจากโดรน DJI Phantom 4 RTK
.






