
- 1 Giới thiệu
- 2 Tính năng
- 3 Nội dung gói
- 4 Đặc điểm kỹ thuật
- 4.1 Drone
- 4.2 Các chức năng ánh xạ
- 4.3 Định vị trực quan
- 4.4 Máy ảnh
- 4.5 Pin
- 4.6 Trạm sạc thông minh
- 4.7 GNSS
- 4.8 Đình chỉ
- 4.9 Hệ thống hồng ngoại
- 4.10 Bảng điều khiển
- 5 Hình thức
- 6 Máy ảnh
- 7 Hệ thống định vị
- 8 TimeSync
- 9 OcuSync 2.0
- 10 Ứng dụng GS RTK
- 11 Trạm di động D-RTK 2
- 12 Hỗ trợ SDK di động
- 13 Phantom 4 RTK trong thực tế
- 14 Giá
- 15 Câu hỏi thường gặp
- 15,1 Máy bay không người lái
- 15,2 Máy ảnh
- 15,3 Điều khiển từ xa
- 15,4 Luồng video
- 15,5 Pin
- 15,6 Định vị
- 15,7 Phần mềm
- 15,8 Ánh xạ
- 16 Video
Giới thiệu
Vào ngày 15 tháng 10, công ty hàng đầu thế giới về máy bay không người lái dân dụng và công nghệ chụp ảnh từ trên không - DJI Innovationsphiên bản thương mạiPhantom. Phantom 4 RTK là một hệ thống hình ảnh mạnh mẽ, có độ chính xác cao được thiết kế để đáp ứng các nhu cầu cụ thể của người dùng công nghiệp trong các lĩnh vực như lập bản đồ và kiểm tra.
Tính năng
- Mô-đun RTK mới
- Định vị chính xác đến từng centimét với ít điểm kiểm soát nhất
- Độ chính xác của vị trí trong mặt phẳng ngang: 1cm 1md
- Độ chính xác của vị trí trong mặt phẳng thẳng đứng: 1,5cm 1md
- Độ chính xác tuyệt đối của mô hình trắc quang trong mặt phẳng nằm ngang: 5cm*
- Hệ thống hiệu chỉnh TimeSync mới
- Ứng dụng lập kế hoạch chuyến bay mới GS RTK
- 2 chế độ bay
- Hệ thống xử lý hình ảnh chính xác được xây dựng trên cảm biến CMOS 1 inch 20MP với cơ khí màn trập
- Hỗ trợ SDK di động
- Hệ thống truyền dẫn OcuSync 2.0
- Hoàn toàn tương thích với trạm di động D-RTK 2
- Thích hợp cho công việc ở các khu vực đô thị
*Khi bay trong thời tiết nắng ở độ cao 100m, kích thước pixel trên mặt đất (GSD) 2,74 cm.

Nội dung gói
Nội dung gói của Phantom 4 RTK hoàn toàn phụ thuộc vào các nhiệm vụ do khách hàng đặt ra (người dùng). Để đặt hàng máy bay không người lái, bạn nên liên hệ với đại lý DJI chính thức gần nhất hoặc gửi thông tin liên hệ của bạn cho nhóm DJI qua trang web chính thức để họ có thể liên hệ với bạn.
Bộ cơ bản sẽ bao gồm:
- Bộ điều khiển Phantom 4 RTK
- với màn hình siêu sáng 5,5 inch tích hợp,
- 2 × pin thông minh cho P4 RTK,
- 1 × pin thông minh cho bảng điều khiển,
- bộ sạc để sạc đồng thời cả hai pin,
- Kết nối bộ sạc nguồn cáp,
- 8 × rôto (4CW / 4CCW)
- Khóa gimbal của máy ảnh
- 16GB MicroSD
- Hộp vận chuyển
- Micro-USB cáp
- Cáp USB-C
- Cáp USB-C OTG.

Đặc điểm kỹ thuật
Máy bay không người lái
Chức năng ánh xạ

Định vị trực quan
Máy ảnh
Pin
Trạm sạc thông minh

GNSS
Hình thức




Máy ảnh
Về cốt lõi, cảm biến CMOS 20 megapixel 1 inch hoạt động song song với màn trập cơ học giúp loại bỏ biến dạng hình ảnh khi chụp chuyển động, do đó cho phép lập bản đồ các nhiệm vụ hoặc thu thập dữ liệu thông thường một cách liền mạch. Nhờ độ phân giải cao, Phantom 4 RTK có thể đạt GSD 2,74cm từ độ cao 100 mét. Để đảm bảo độ chính xác chưa từng có này, mỗi ống kính phải trải qua một quy trình hiệu chuẩn nghiêm ngặt để đo độ méo thấu kính xuyên tâm và tiếp tuyến. Các thông số biến dạng thu thập được được lưu trong siêu dữ liệu của mỗi hình ảnh, cho phép phần mềm xử lý hậu kỳ được điều chỉnh riêng cho bất kỳ người dùng nào.

Ở những khu vực không có vùng phủ sóng RTK, Phantom 4 RTK sẽ kích hoạt động học Post Xử lý Kinematic (PPK). Máy bay không người lái thu thập dữ liệu quan sát vệ tinh ban đầu, cũng như dữ liệu về thiên văn và lưu chúng trong tệp PPKRAW.bin ở định dạng RTCM 3.2. Ngoài ra, P4 RTK chuyển đổi dữ liệu vệ tinh nhanh chóng sang RINEX (Định dạng trao đổi độc lập với máy thu) và ghi dữ liệu đó vào tệp RINEX.obs.
Bằng cách đồng bộ hóa nội bộ vị trí của GNSS và máy ảnh, tệp Timestamp. MRK cung cấp bản ghi chính xác về vị trí chính xác cao của hình ảnh. Tất cả dữ liệu liên quan đến hoạt động được lưu trữ trên thẻ microSD trong một thư mục duy nhất cho từng nhiệm vụ riêng lẻ. Tính nhất quán dữ liệu Phantom 4 RTK giúp giảm thời gian xác minh và cho phép quy trình xử lý hậu kỳ hiệu quả với các điều chỉnh thủ công tối thiểu.
Hệ thống định vị

trong thời gian thực độ chính xác định vị centimet của dữ liệu nhận được.
Nếu không có mô-đun RTK, một thiết bị bay không người lái cần tới 40 điểm kiểm soát mặt đất (GCP) trên mỗi km vuông, điều này gây tốn thời gian trong thực tế. DJI Phantom 4 RTK được tích hợp hệ thống định vị định vị RTK chính xác đến từng centimet hoạt động cùng với hệ thống hình ảnh hiệu suất cao. Tandem có khả năng giảm số lượng điểm ngắt cần thiết cho '0', tiết kiệm ít nhất 75% thời gian thiết lập.

Ngay bên dưới bộ thu RTK là mô-đun GNSS dự phòng cho chuyến bay ổn định ở các khu vực tín hiệu thấp như các thành phố lớn. Mô-đun Phantom 4 RTK song song tối ưu hóa an toàn bay và dữ liệu chính xác nhất cho các quy trình khảo sát, lập bản đồ và kiểm tra phức tạp.
Mô-đun RTK có thể cung cấp độ chính xác định vị 1cm 1ppm (ngang), 1,5cm 1ppm (dọc) và Phantom 4 RTK có thể đạt được độ chính xác tuyệt đối của mô hình đo quang là 5 cm trong mặt phẳng ngang * (* Khi bay trong thời tiết nắng ở độ cao 100m, kích thước pixel mặt đất (GSD) 2,74cm).
TimeSync
![]()
Hệ thống mới để thu thập dữ liệu chính xác - TimeSync. Cung cấp sự căn chỉnh liên tục của bộ điều khiển chuyến bay, máy ảnh và mô-đun RTK. Ngoài ra, TimeSync đảm bảo rằng mọi bức ảnh sử dụng siêu dữ liệu chính xác nhất và chụp nó ở trung tâm của CMOS, từ đó tối ưu hóa kết quả bằng cách sử dụng kỹ thuật đo quang, cho phép hình ảnh khớp với dữ liệu định vị ở cấp độ centimet.
OcuSync 2.0

Hệ thống truyền video OcuSync 2.0 cung cấp kết nối ổn định, chống nhiễu giữa thiết bị điều khiển và máy bay không người lái xa đến 10 km với chất lượng liên kết video 720p, lý tưởng cho việc lập bản đồ khu vực rộng lớn. Khoảng thời gian bay lên đến 30 phút sẽ cho phép phi công hoàn thành các nhiệm vụ dài hơn mà không cần phải hạ cánh để thay pin.
Ngay cả khi một pin không đủ để bao phủ toàn bộ khu vực làm việc, sau khi thay đổi nguồn, “Tiếp tục hoạt động” sẽ tự động tiếp tục ứng dụng GS RTK.
Ứng dụng GS RTK
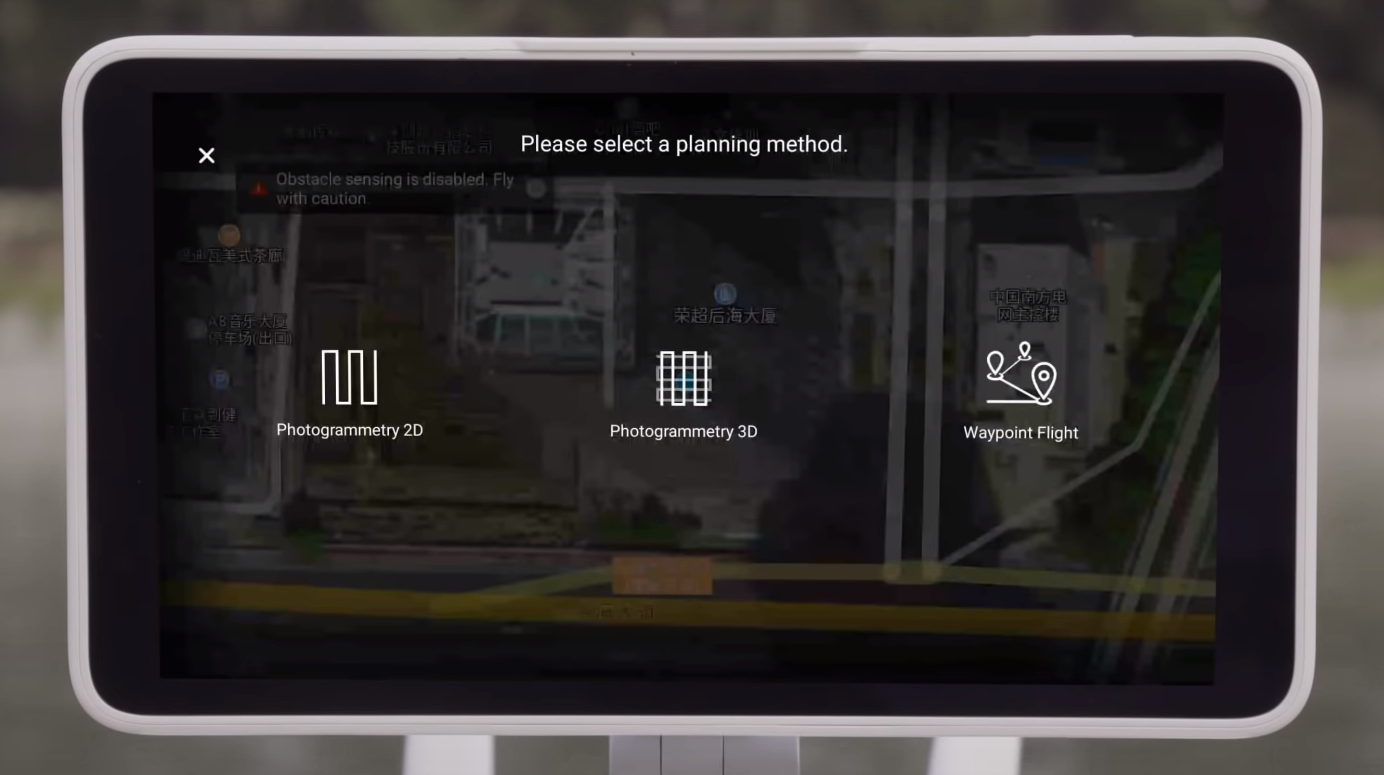
Ứng dụng GS RTK mới cùng với các chế độ bay truyền thống sẽ cho phép phi công điều khiển máy bay không người lái tốt hơn nhờ vào hai chế độ lập kế hoạch - Photogrammetry và Waypoint Flight. Chế độ lập kế hoạch cho phép người dùng chọn đường bay của máy bay không người lái, đồng thời điều chỉnh tỷ lệ trùng lặp, độ cao, tốc độ, các thông số máy ảnh, v.v., cung cấp quy trình lập bản đồ tự động hoặc kiểm soát quy trình làm việc ở đầu ra. Các chuyến khởi hành theo lịch trình có thể dễ dàng lặp lại, điều này giúp bạn có thể thu thập cùng một dữ liệu trong các khoảng thời gian khác nhau để theo dõi bất kỳ thay đổi nào trong khu vực được kiểm soát.

Để lập kế hoạch chuyến bay trong văn phòng, ứng dụng GS RTK tải trực tiếp các tệp KML và KMZ. Chế độ Ưu tiên màn trập mới đảm bảo độ phơi sáng ổn định ngay cả khi bay tự động trong điều kiện gió lớn.
D-RTK Mobile Station 2

Phantom 4 RTK hoàn toàn tương thích với D-RTK Mobile Trạm 2, có nhiệm vụ cung cấp cho máy bay không người lái dữ liệu vi sai trong thời gian thực và hình thành giải pháp trắc địa chính xác. Thiết kế mạnh mẽ của D-RTK 2,mức độ bảo vệIP67,cùng với hệ thống truyền video OcuSync 2.0, đảm bảo người dùng nhận được dữ liệu chính xác đến từng centimet ngay cả trong những điều kiện khó khăn.
Phantom 4 RTK dễ dàng tích hợp vào bất kỳ quy trình làm việc nào bằng cách kết nối hệ thống định vị với trạm di động D-RTK 2 thông qua thiết bị bảo vệ hoặc điểm Wi-Fi 4G sử dụng giao thức NTRIP (GPS phân luồng vi sai qua Internet), hoặc bạn có thể lưu tất cả dữ liệu nhận được để xử lý tiếp theo bằng phương pháp chuyển động học trong xử lý hậu kỳ (PPK - Post Processing Kinematic).
Hỗ trợ SDK di động
Phantom 4 RTK tương thích với DJI Mobile SDK, cho phép người dùng truy cập trực tiếp vào các chức năng của máy bay không người lái để tự động hóa và tùy biến thông qua thiết bị di động.
Phantom 4 RTK trong thực tế

DJI đang hợp tác chặt chẽ với gã khổng lồ xây dựng châu Âu Strabag SE, một công ty lớn trong lĩnh vực cơ sở hạ tầng giao thông. Sử dụng công nghệ không người lái trong một số dự án lập bản đồ kể từ năm 2010 để giảm chi phí và tăng năng suất lao động, công ty đã đánh giá cao lợi ích của việc sử dụng ảnh chụp từ trên không trong mô hình 3D. Công cụ mới nhất cho các tác vụ như vậy cho Strabag SE là DJI Phantom 4 RTK.
“Có nhiều lợi thế khi sử dụng máy bay không người lái cho mục đích lập bản đồ. Sự tích hợp của chúng đã thay đổi quy trình làm việc của chúng tôi và đơn giản hóa nhiều bước hoạt động, ”Thomas Groeninger, Trưởng bộ phận Đánh giá Tài sản và UAV kỹ thuật số tại Strabag SE cho biết. "Các phương pháp khảo sát thông thường cũng cung cấp mô hình 3D, nhưng mô hình địa hình kỹ thuật số được tạo ra từ dữ liệu máy bay không người lái cung cấp mật độ điểm cao và do đó chi tiết hơn."
Giá
Để đặt hàng máy bay không người lái, bạn nên liên hệ với đại lý DJI chính thức gần nhất hoặc gửi thông tin liên hệ của bạn cho nhóm DJI thông qua trang web chính thức để họ có thể liên hệ với bạn.
- Phantom 4 RTK - 5700 €
- Trạm di động D-RTK 2 - 3600 €
- Trạm di động Phantom 4 RTK D-RTK 2 - 7800 €
FAQ
Drone

Q: Điều gì tạo nên Phantom 4 RTK khác với các mẫu Phantom trước? Đáp: Tất cả các dòng Phantom trước đây đều hướng đến các nhiếp ảnh gia chuyên nghiệp và những người yêu thích máy bay không người lái, Phantom 4 RTK được thiết kế cho người dùng công nghiệp trong các lĩnh vực như kiểm tra và lập bản đồ chính xác. P4 RTK thừa hưởng một máy ảnh, hình dạng và kích thước tương tự, cũng như bổ sung mô-đun định vị RTK, hệ thống TimeSync mới, ứng dụng bản đồ và hơn thế nữa.
Hỏi: Phantom 4 RTK có những cánh quạt nào? Đáp: P4 RTK được trang bị 9450 đạo cụ tiêu chuẩn đi kèm với Phantom 4 Pro.
Hỏi: Tôi có thể lái Phantom 4 RTK ở các quốc gia và khu vực khác không? Đáp: Không, P4 RTK có các phiên bản cụ thể cho các quốc gia và / hoặc khu vực khác nhau. Người dùng có thể kiểm tra mã phiên bản bằng cách tìm mã trên bao bì sản phẩm hoặc thông qua ứng dụng GS RTK (trong phần Thông tin Drone của Firmware).
Máy ảnh
Hỏi: Sự khác biệt giữa máy ảnh Phantom 4 RTK và Phantom 4 Pro / Advanced là gì? Đáp: Mặc dù cả ba đều được xây dựng trên cùng một cảm biến CMOS 20 megapixel 1 inch, nhưng máy ảnh P4 RTK đã được tinh chỉnh thông qua quy trình ghi lại độ méo ống kính mới. Mỗi máy ảnh P4 RTK đều trải qua một quy trình hiệu chuẩn, trong đó độ méo ống kính được đo và các thông số OPEN-CV tương ứng được ghi lại. Máy ảnh cho phép bạn hiển thị hình ảnh gốc mà không cần chỉnh sửa biến dạng và các thông số biến dạng OPEN-CV được ghi lại trong tệp XMP có thể được sử dụng trong quá trình xử lý hậu kỳ.
Hỏi: Có thể sử dụng kính lọc Phantom 4 Pro ND trên Phantom 4 RTK không? A: Có, có thể bộ lọc ND được tạo cho P4Pro cũng có thể được sử dụng trên P4 RTK.
Hỏi: Bộ xử lý tín hiệu kỹ thuật số (DSP) của máy bay có hỗ trợ hiệu chỉnh độ méo của máy ảnh không? Đáp: Không, người dùng có thể bật tính năng chỉnh méo trong máy ảnh, nhưng khi đó độ trung thực của hình ảnh sẽ kém hơn so với chỉnh méo trong phần mềm xử lý hậu kỳ.
Bộ điều khiển từ xa
![]()
Hỏi: Sự khác biệt giữa Bộ điều khiển từ xa Phantom 4 RTK và Phantom 4 Pro Điều khiển từ xa? Đáp: Bảng điều khiển P4 RTK đã nhận được một số thay đổi để đáp ứng nhu cầu của người dùng công nghiệp, bao gồm: khe cắm thẻ nhớ microSD, loa tích hợp, pin có thể thay thế nóng. Ngoài ra, người dùng có thể kết nối thiết bị điều khiển với Internet để vận hành Network RTK bằng phím 4G. Cuối cùng, một ứng dụng GS RTK được thiết kế đặc biệt mới đã được cài đặt sẵn trên mỗi thiết bị, cho phép người vận hành bắt đầu các tác vụ thu thập dữ liệu ngay sau khi giải nén.
![]()
Hỏi: Thiết bị điều khiển Phantom 4 Pro có thể điều khiển P4 RTK không? Đáp: Không.
Hỏi: Có thể chuyển đổi giữa chế độ FCC và CE không? О: Không thể chuyển đổi giữa các chế độ.
Luồng video
Hỏi: Khoảng cách FPV từ Phantom 4 RTK là bao nhiêu? A: Khoảng cách bù FPV hiệu quả phụ thuộc vào phương pháp vận hành của người dùng (ví dụ: vị trí ăng-ten) và môi trường thực tế trong khu vực có người lái. Trong môi trường mở và đóng, khoảng cách FPV tối đa là 10 km (đối với FCC 5,8 GHz) và 6 km (đối với CE 2,4 GHz).
Hỏi: Có thể tiếp tục sứ mệnh lập bản đồ đã bắt đầu nếu trong quá trình thực hiện P4 RTK mất tín hiệu truyền video không? Đáp: Có, nếu tín hiệu truyền video bị mất, người dùng có thể khởi động lại thiết bị và tiếp tục nhiệm vụ.
Pin

Hỏi: Có thể sử dụng pin P4 Pro trong Phantom 4 RTK không? Đ: Có, pin của máy bay không người lái hoàn toàn có thể thay thế cho nhau.
Hỏi: Mất bao lâu để sạc đầy pin P4 RTK? Đáp: Không mất quá 60 phút để sạc đầy.
Hỏi: Cần bảo dưỡng và bảo quản pin như thế nào? Đáp: Bảo quản nơi khô ráo. Trước khi lưu trữ lâu dài, hãy đảm bảo rằng pin được sạc ở mức 50% hoặc cao hơn và xả ba tháng một lần để duy trì hiệu suất.
Hỏi: Có thể sử dụng pin máy bay không người lái trong môi trường nhiệt độ thấp không? A: Hiệu suất pin giảm đột ngột khi nhiệt độ
Hỏi: Những ứng dụng nào có chức năng lập bản đồ và kiểm tra? Đáp: Ứng dụng GS RTK được cài đặt sẵn có thể được sử dụng để lập bản đồ và kiểm tra. Ngoài ra, người dùng có thể cài đặt các ứng dụng được tạo trong DJI Mobile SDK.
Hỏi: Hành vi Return to Home (RTH) của Phantom 4 RTK có khác với Phantom 4 Pro không? Đáp: Không, chế độ RTH P4 RTK gần như giống hệt nhau.
Hỏi: Có bất kỳ hạn chế nào đối với việc đặt điểm tham chiếu cho P4 RTK không? Đáp: Có, khoảng cách giữa các điểm không được vượt quá 2 km, tổng số điểm không được vượt quá 99 và chiều dài của kế hoạch bay không được vượt quá 15 km.
Hỏi: Có được phép nhập các giá trị kinh độ và vĩ độ để thiết lập điểm tham chiếu không? Đáp: Không.
Hỏi: Số điểm ranh giới tối đa mà GS RTK có thể hỗ trợ thông qua các tệp KML đã nhập là bao nhiêu? Đáp: Hiện tại ứng dụng hỗ trợ tối đa 99 điểm ranh giới.
Ánh xạ

Hỏi: Phantom 4 RTK hỗ trợ những định dạng dữ liệu khác biệt nào? Đáp: P4 RTK hiện hỗ trợ: RTCM 3.0, RTCM 3.1, MSM4 và MSM5 ở định dạng RTCM3.2.
Hỏi: Tọa độ được đo bằng Phantom 4 RTK có tuyệt đối trong hệ tọa độ do người dùng chọn không? Đáp: Đúng vậy.
Hỏi: Làm thế nào để tính toán độ cao bay cần thiết dựa trên giá trị GSD? Đáp: Để ước tính độ cao thích hợp, hãy tham khảo phương trình: H = 36 * GSD. Cần lưu ý rằng kích thước của pixel trên mặt đất (GSD) được đo bằng cm, và giá trị "H" (độ cao hoặc độ cao bay) được đo bằng mét.
Hỏi: Những hình ảnh được chụp bởi P4 RTK có lưu dữ liệu độ cao không? Nếu vậy, dữ liệu này được lưu trữ như thế nào? Đáp: Đúng vậy. Độ cao trên mực nước biển và độ cao tương đối (so với điểm cất cánh của người dùng). Chiều cao tuyệt đối có thể được sử dụng để lập bản đồ. Chiều cao tương đối được lưu trữ trong tệp XMP.
Hỏi: Làm cách nào để chụp ảnh xiên bằng Phantom 4 RTK? Đáp: Có thể thu được ảnh nghiêng ở chế độ đo ảnh trong ứng dụng GS RTK. Trong chế độ "Đo ảnh", bạn có thể điều chỉnh góc nghiêng của gimbal từ -90 ° đến -45 ° trong cài đặt máy ảnh cho mỗi kế hoạch bay. Người dùng chỉ có thể đặt một giá trị góc gimbal tại một thời điểm. Để có được nhiều góc quay, bạn cần lên kế hoạch cho cùng một nhiệm vụ và đặt góc máy ảnh mong muốn.
Hỏi: Có thể tạo mô hình 3D hoặc đám mây điểm bằng phần mềm của bên thứ ba bằng cách sử dụng hình ảnh được chụp bởi P4 RTK không? Nếu vậy, độ chính xác của mô hình kết quả là bao nhiêu? Đáp: Có, có thể. Tuy nhiên, độ chính xác sẽ phụ thuộc vào thuật toán đo quang của phần mềm bên thứ ba được sử dụng. Vui lòng liên hệ với nhà cung cấp phần mềm của bạn để xác định độ chính xác mong đợi.
Hỏi: Cách tốt nhất để sử dụng P4 RTK để lập bản đồ hành lang là gì? Đáp: Trong trường hợp dữ liệu được thu thập qua cơ sở hạ tầng hoặc hành lang hẹp khác, nhà phát triển khuyến nghị đặt hệ số chồng chéo cao, bay trên mức bình thường và lập kế hoạch ít nhất hai đường bay cho cùng một hành lang.
Hỏi: Phantom 4 RTK có tương thích với các trạm gốc của bên thứ ba không? Đáp: Không, không thể kết nối các trạm gốc của bên thứ ba với P4 RTK hoặc thiết bị điều khiển vô tuyến. Tuy nhiên, có thể nhận dữ liệu từ máy chủ RTK mạng thông qua giao thức Ntrip trong môi trường mạng 4G / Wi-Fi. Dữ liệu quan sát vệ tinh cũng có thể được lưu trữ trong máy bay không người lái để xử lý hậu kỳ (PPK).
Video
Video từ máy bay không người lái DJI Phantom 4 RTK.
.






